") 云臺伺服驅(qū)動板閉環(huán)控制參數(shù)解讀與整定
云臺伺服驅(qū)動板閉環(huán)控制參數(shù)解讀與整定

云臺伺服驅(qū)動板的閉環(huán)控制性能直接決定穩(wěn)像精度、響應(yīng)速度與操作手感,主流采用 “電流環(huán) - 速度環(huán) - 位置環(huán)” 串級閉環(huán)架構(gòu)。本文系統(tǒng)解讀閉環(huán)控制核心參數(shù)(PID 增益、限幅、濾波、前饋)的物理意義與影響機制,針對云臺 “低抖動、高平順、快響應(yīng)、強抗擾” 的核心訴求,提出 “內(nèi)環(huán)穩(wěn) - 中環(huán)順 - 外環(huán)準” 的整定原則與標(biāo)準化流程,通過參數(shù)優(yōu)化使云臺靜態(tài)角度誤差≤±0.03°,動態(tài)響應(yīng)無過沖,低速(0.1°/s)無蠕動,為伺服驅(qū)動板調(diào)試與量產(chǎn)標(biāo)定提供可直接落地的技術(shù)方案。
云臺伺服驅(qū)動板
云臺伺服驅(qū)動板的閉環(huán)控制是一個多環(huán)協(xié)同的復(fù)雜系統(tǒng):電流環(huán)(內(nèi)環(huán))保障力矩輸出平穩(wěn),速度環(huán)(中環(huán))抑制擾動與噪聲,位置環(huán)(外環(huán))實現(xiàn)精準定位。實際調(diào)試中,參數(shù)配置不當(dāng)易導(dǎo)致電機嘯叫、畫面抖動、響應(yīng)滯后、過沖回彈等問題,尤其在手持云臺、航拍吊艙等高精度場景中,參數(shù)匹配度直接決定產(chǎn)品競爭力。本文從參數(shù)本質(zhì)出發(fā),拆解各環(huán)參數(shù)對系統(tǒng)性能的影響,給出量化取值范圍與分步整定方法,解決工程化調(diào)試中的核心痛點。
二、閉環(huán)控制架構(gòu)與核心參數(shù)體系
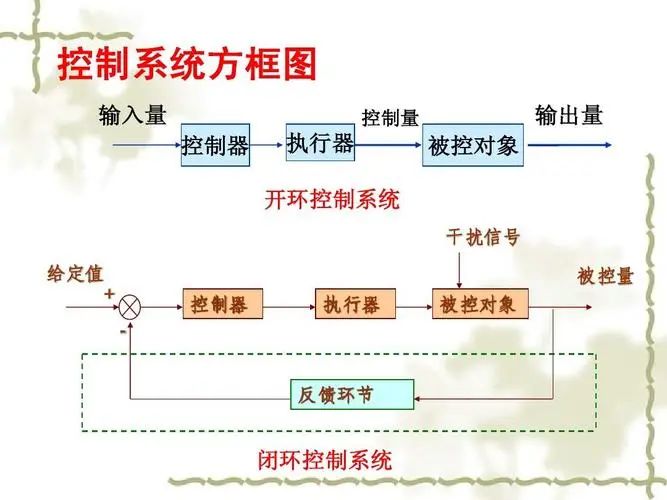
2.1 串級閉環(huán)控制邏輯
云臺伺服驅(qū)動板采用 “位置環(huán)→速度環(huán)→電流環(huán)” 的串級結(jié)構(gòu):
位置環(huán)接收目標(biāo)角度指令,輸出速度給定值;
速度環(huán)跟蹤速度給定,輸出電流(力矩)給定值;
電流環(huán)快速響應(yīng)電流指令,通過 SVPWM 驅(qū)動電機運轉(zhuǎn)。
控制優(yōu)先級:電流環(huán)響應(yīng)最快(帶寬最高)→ 速度環(huán)次之 → 位置環(huán)最慢(帶寬最低),典型帶寬比例為 2000Hz:200Hz:20Hz,避免環(huán)間諧振。
2.2 核心參數(shù)分類與定義
閉環(huán)控制參數(shù)分為五大類,各類參數(shù)功能互補、相互制約:
| 參數(shù)類型 | 核心作用 | 關(guān)鍵參數(shù) |
| 比例增益(P) | 提高響應(yīng)速度與剛性,縮小動態(tài)偏差 | 位置環(huán) Kp、速度環(huán) Kp、電流環(huán) Kp |
| 積分增益(I) | 消除穩(wěn)態(tài)靜差,提升精度 | 速度環(huán) Ki、電流環(huán) Ki(位置環(huán)一般不用 I) |
| 微分增益(D) | 抑制振蕩,預(yù)判變化趨勢 | 僅高速 / 高剛性場景弱啟用(云臺極少用) |
| 限幅參數(shù) | 防止環(huán)路飽和,保護器件與系統(tǒng)安全 | 電流限幅、速度限幅、加速度限幅 |
| 輔助參數(shù) | 優(yōu)化動態(tài)性能與抗擾能力 | 低通濾波、陷波濾波、速度 / 加速度前饋 |
三、各環(huán)核心參數(shù)解讀(物理意義 + 影響規(guī)律)
3.1 電流環(huán)參數(shù)(力矩輸出核心)
電流環(huán)是閉環(huán)控制的 “基礎(chǔ)層”,直接控制電機三相電流,決定力矩輸出的平順性與響應(yīng)速度。
3.1.1 關(guān)鍵參數(shù)
電流環(huán)比例增益(Kp_i)
物理意義:電流響應(yīng)靈敏度,Kp_i 越大,電流跟蹤指令越快,力矩剛性越強;
影響規(guī)律:過小→力矩軟、響應(yīng)慢、低速抖動;過大→電流振蕩、電機嘯叫、MOS 管發(fā)熱;
工程取值:8~35(與電機相電阻、電感匹配,小電機取小值,大扭矩電機取大值)。
電流環(huán)積分增益(Ki_i)
物理意義:消除電流靜差,保證穩(wěn)態(tài)力矩穩(wěn)定;
影響規(guī)律:過小→低速力矩波動、負載下掉速;過大→動態(tài)超調(diào)、電流紋波增大;
工程取值:200~1200。
電流限幅(I_limit)
直接限制最大 q 軸電流(力矩電流),分為連續(xù)電流與峰值電流;
消費級云臺:連續(xù) 0.5~1.5A,峰值 1.5~3A;工業(yè)級云臺:連續(xù) 2~5A,峰值 5~8A;
作用:防止過流燒毀 MOS 管與電機,避免云臺失控甩動。
低通濾波截止頻率:150~500Hz;
作用:濾除電流采樣噪聲,避免噪聲放大導(dǎo)致的力矩脈動。
3.1.2 核心要求
電機靜止時無嘯叫、無明顯發(fā)熱,正反轉(zhuǎn)切換無沖擊,低速旋轉(zhuǎn)力矩均勻無脈動。
3.2 速度環(huán)參數(shù)(平穩(wěn)與抗擾核心)
速度環(huán)是云臺 “穩(wěn)像關(guān)鍵層”,負責(zé)抑制機械摩擦、外部抖動、編碼器噪聲,保證低速平滑與抗擾能力。
3.2.1 關(guān)鍵參數(shù)
速度環(huán)比例增益(Kp_v)
物理意義:速度響應(yīng)剛性,Kp_v 越大,抗外力擾動能力越強,速度偏差越小;
影響規(guī)律:過小→云臺松垮、易晃、松手回正慢;過大→高頻抖動、電機嘶鳴、畫面震顫;
工程取值:0.3~6(消費級取 0.3~2,工業(yè)級取 2~6)。
速度環(huán)積分增益(Ki_v)
物理意義:消除速度靜差,保證極低速無蠕動;
影響規(guī)律:過小→低速卡頓、負載下速度漂移;過大→響應(yīng)滯后、超調(diào)振蕩;
工程取值:3~60。
速度濾波(Filter_v)
低通濾波截止頻率:10~60Hz;
作用:抑制編碼器高頻噪聲與機械諧振,是消除畫面細微抖動的核心參數(shù)。
速度前饋(Feedforward_v)
物理意義:提前補償目標(biāo)速度,減少跟蹤滯后;
取值范圍:0.2~0.9,開啟后云臺 “跟手性” 顯著提升,畫面無延遲感。
加速度限幅(Acc_limit)
限制速度環(huán)輸出的變化率,消費級云臺:50~200°/s2;工業(yè)級:200~500°/s2;
作用:保證云臺動作柔和,避免畫面突變。
3.2.2 核心要求
0.1°/s 極低速運行順滑無卡頓,手推云臺后松手立即回穩(wěn)(回穩(wěn)時間≤300ms),無殘留振蕩。
3.3 位置環(huán)參數(shù)(定位精度核心)
位置環(huán)是閉環(huán)控制的 “最終層”,直接決定角度定位精度與穩(wěn)像效果,參數(shù)配置需平衡剛性與平順性。
3.3.1 關(guān)鍵參數(shù)
位置環(huán)比例增益(Kp_p)
物理意義:位置響應(yīng)靈敏度,Kp_p 越大,定位越快、剛性越強;
影響規(guī)律:過小→定位慢、角度漂移、松垮感;過大→高頻震顫、過沖回彈、剛性過強;
工程取值:5~45(消費級 5~20,工業(yè)高穩(wěn)云臺 20~45)。
位置環(huán)輸出限幅(Speed_limit)
限制位置環(huán)輸出的最大速度(即速度環(huán)給定上限);
取值:30~300°/s,防止云臺超速甩動。
位置前饋(Feedforward_p)
包括速度前饋與加速度前饋,專業(yè)云臺必開;
作用:大幅降低動態(tài)跟蹤滯后,使畫面 “跟手不拖尾”。
3.3.2 核心要求
階躍指令下定位誤差≤±0.03°,無過沖、無靜差,靜止時角度抖動≤±0.01°。
四、閉環(huán)參數(shù)標(biāo)準化整定流程(工程實操)
整定原則:先內(nèi)環(huán)后外環(huán)、先 P 后 I、先剛性后平順、先空載后負載,避免跨環(huán)調(diào)試導(dǎo)致的系統(tǒng)紊亂。
4.1 第一步:整定電流環(huán)(空載優(yōu)先)
關(guān)閉速度環(huán)、位置環(huán),進入開環(huán)電流控制模式;
設(shè)定電流限幅(連續(xù)電流取額定值的 70%);
逐步增大 Kp_i,直到電機出現(xiàn)輕微嘯叫,記錄該值并回退 30%~40%(如嘯叫時 Kp_i=30,最終取 18~21);
逐步增大 Ki_i,直到靜止時電流無明顯波動,動態(tài)跟蹤無靜差;
驗證:旋轉(zhuǎn)電機一周,電流波形平滑無尖峰,電機無過熱。
4.2 第二步:整定速度環(huán)(空載→輕載)
開啟速度環(huán),關(guān)閉位置環(huán),給定低速指令(5~30°/s);
調(diào) Kp_v:從 0.3 開始逐步增大,直到云臺出現(xiàn)微抖,回退 20%~30%;
調(diào) Ki_v:從 3 開始逐步增大,消除低速蠕動與速度靜差,避免超調(diào);
開啟速度前饋(0.4~0.7),優(yōu)化跟蹤性;
加入速度濾波(20~40Hz),抑制噪聲;
驗證:0.1°/s 極低速無卡頓,手推云臺快速回穩(wěn),無嘶鳴。
4.3 第三步:整定位置環(huán)(輕載→滿載)
開啟位置環(huán),發(fā)送小角度階躍指令(±5°、±10°);
調(diào) Kp_p:從 5 開始逐步增大,直到定位無過沖、無振蕩,剛性滿足需求;
設(shè)定速度限幅與加速度限幅,保證動作柔和;
開啟位置前饋(速度前饋 0.6~0.9,加速度前饋 0.3~0.5);
驗證:靜態(tài)誤差≤±0.03°,動態(tài)響應(yīng)無滯后,滿載運行無漂移。
4.4 第四步:負載優(yōu)化(模擬真實場景)
裝上相機 / 負載(模擬真實重量),重復(fù)上述步驟微調(diào)參數(shù);
重點優(yōu)化速度環(huán)濾波與位置環(huán) Kp_p,抑制負載帶來的共振;
極端場景測試:快速轉(zhuǎn)向、外力撞擊、低溫環(huán)境,參數(shù)無失穩(wěn)。
五、典型問題與參數(shù)調(diào)整對策
| 故障現(xiàn)象 | 核心原因 | 調(diào)整方案 |
| 電機高頻嘯叫 | 電流環(huán) Kp_i 過大、速度環(huán) Kp_v 過大 | 降低對應(yīng) Kp 值,增加濾波頻率 |
| 低速一卡一卡 | 速度環(huán) Ki_v 不足、摩擦力未補償 | 增大 Ki_v,開啟摩擦力前饋 |
| 畫面細微抖動 | 速度環(huán)濾波過弱、編碼器噪聲 | 提高速度濾波頻率(30~50Hz),優(yōu)化編碼器安裝 |
| 云臺松垮易晃 | 位置環(huán) Kp_p 過小、速度環(huán)剛性不足 | 增大 Kp_p 與速度環(huán) Kp_v |
| 定位過沖回彈 | 位置環(huán) Kp_p 過大、無加速度限幅 | 降低 Kp_p,設(shè)置合理加速度限幅 |
| 跟蹤滯后拖尾 | 前饋未開、環(huán)帶寬過低 | 開啟位置 / 速度前饋,適當(dāng)提高各環(huán) Kp 值 |
六、高級優(yōu)化策略(專業(yè)云臺必備)
6.1 變增益控制
靜止?fàn)顟B(tài):高 Kp_p、高濾波,增強抗擾;
低速運動:中 Kp_p、中濾波,平衡平順與響應(yīng);
高速運動:低 Kp_p、低濾波,保證快速跟蹤。
6.2 陷波濾波
針對機械諧振頻率(如 20Hz、50Hz)設(shè)置陷波濾波,深度抑制共振抖動,是專業(yè)穩(wěn)像云臺的核心優(yōu)化手段。
6.3 摩擦力補償
通過離線標(biāo)定機械摩擦力曲線,在速度環(huán)加入摩擦力前饋,實現(xiàn) 0.1°/s 以下超平滑運行。
6.4 溫漂補償
對電流環(huán)、速度環(huán)參數(shù)進行溫度修正,避免寬溫環(huán)境下(-40℃~60℃)參數(shù)失穩(wěn),保證長期可靠性。
七、結(jié)論
云臺伺服驅(qū)動板的閉環(huán)參數(shù)整定是一個 “精準匹配 + 逐步優(yōu)化” 的過程,核心在于理解各參數(shù)的物理意義與環(huán)間協(xié)同關(guān)系:電流環(huán)保證力矩平順,速度環(huán)保證低速平滑與抗擾,位置環(huán)保證定位精準。遵循 “先內(nèi)環(huán)后外環(huán)” 的整定原則,結(jié)合空載→輕載→滿載的測試流程,可快速找到最優(yōu)參數(shù)組合。
實際工程中,無絕對 “通用最優(yōu)參數(shù)”,需根據(jù)電機型號、負載重量、應(yīng)用場景靈活調(diào)整,重點平衡 “剛性與平順性、響應(yīng)速度與穩(wěn)定性”。通過本文的參數(shù)解讀與標(biāo)準化流程,工程師可大幅縮短調(diào)試周期,使云臺實現(xiàn) “靜止零抖動、低速超順滑、快速無過沖、外力快速回穩(wěn)” 的專業(yè)級性能,滿足消費電子與工業(yè)場景的嚴苛要求。
-
PID
+關(guān)注
關(guān)注
38文章
1504瀏覽量
91651 -
閉環(huán)控制
+關(guān)注
關(guān)注
0文章
100瀏覽量
16142 -
三相電流
+關(guān)注
關(guān)注
0文章
96瀏覽量
11491 -
伺服驅(qū)動
+關(guān)注
關(guān)注
4文章
102瀏覽量
18328
發(fā)布評論請先 登錄
高速離心風(fēng)機驅(qū)動板高精度轉(zhuǎn)速閉環(huán)控制技術(shù)
低噪聲高平穩(wěn)直播云臺馬達驅(qū)動板設(shè)計
高平穩(wěn)性云臺馬達驅(qū)動板控制算法優(yōu)化
直播云臺閉環(huán)步進電機驅(qū)動板關(guān)鍵技術(shù)研究
基于FOC的直播云臺無刷電機驅(qū)動控制方案 !
高低溫試驗臺PID參數(shù)自整定技術(shù):如何實現(xiàn)無超調(diào)控溫?

基于MT6813的云臺電機角度閉環(huán)控制系統(tǒng)設(shè)計與應(yīng)用-艾畢勝電子
云臺驅(qū)動板 PWM 載波優(yōu)化設(shè)計
云臺伺服驅(qū)動硬件設(shè)計規(guī)范與實現(xiàn)手冊
云臺電機驅(qū)動板電流環(huán)、速度環(huán)、位置環(huán)參數(shù)解析
閉環(huán)控制存在延時
自動控制系統(tǒng)中什么叫開環(huán)控制,半閉環(huán)控制,閉環(huán)控制?三者有何區(qū)別?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論