") MCP2517FD:高性能CAN FD控制器的技術(shù)剖析與應(yīng)用指南
MCP2517FD:高性能CAN FD控制器的技術(shù)剖析與應(yīng)用指南

MCP2517FD:高性能CAN FD控制器的技術(shù)剖析與應(yīng)用指南
一、引言
在當(dāng)今的電子系統(tǒng)設(shè)計(jì)中,CAN FD(Controller Area Network with Flexible Data Rate)技術(shù)憑借其高速數(shù)據(jù)傳輸和靈活的數(shù)據(jù)長(zhǎng)度特性,在汽車、工業(yè)自動(dòng)化等領(lǐng)域得到廣泛應(yīng)用。Microchip的MCP2517FD作為一款外部CAN FD控制器,以其豐富的功能和出色的性能,為工程師們提供了一個(gè)可靠的解決方案。本文將對(duì)MCP2517FD的特性、功能模塊、內(nèi)存組織、SPI接口等方面進(jìn)行詳細(xì)剖析,幫助電子工程師更好地理解和應(yīng)用這款控制器。
文件下載:MCP2517FDT-H SL.pdf
二、MCP2517FD概述
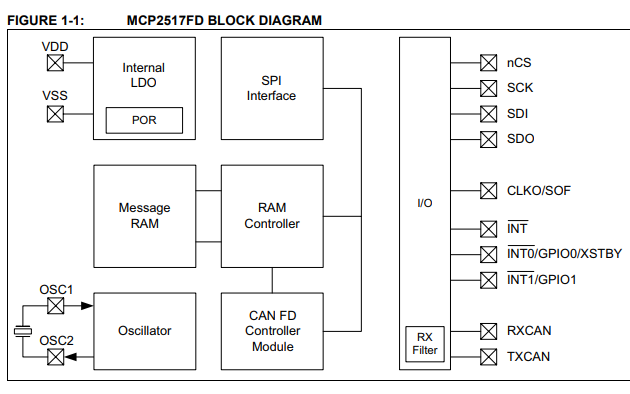
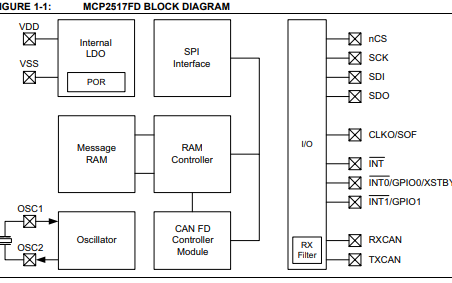
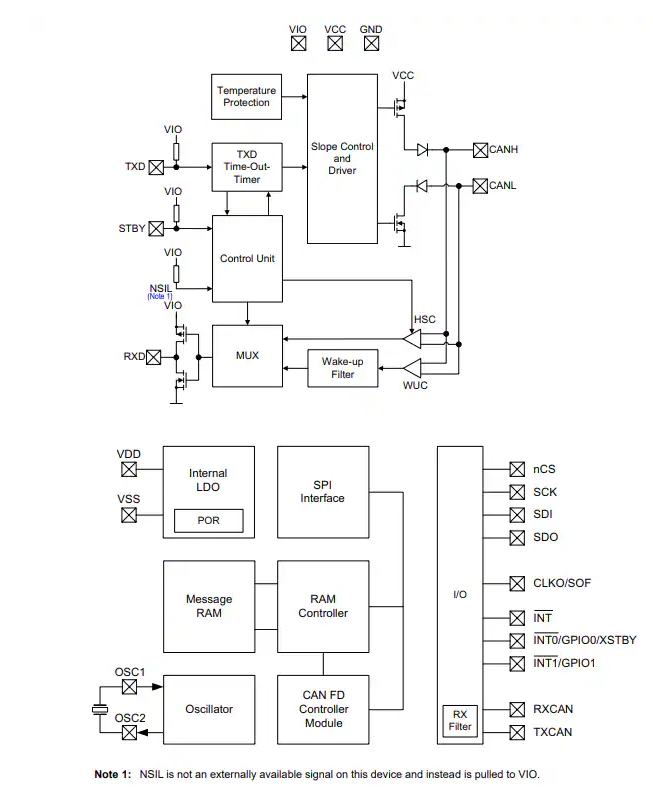
MCP2517FD是一款具有SPI接口的外部CAN FD控制器,具有成本低、占用空間小的特點(diǎn)。它可以輕松地添加到帶有SPI接口的微控制器中,為缺乏CAN FD外設(shè)或CAN FD通道不足的微控制器添加CAN FD通信功能。該控制器支持ISO 11898 - 1:2015標(biāo)準(zhǔn),能夠處理經(jīng)典CAN 2.0B和CAN FD格式的幀。
2.1 主要特性
- 速率優(yōu)勢(shì):仲裁比特率最高可達(dá)1 Mbps,數(shù)據(jù)比特率最高可達(dá)8 Mbps,滿足高速數(shù)據(jù)傳輸需求。
- 模式多樣:具備混合CAN 2.0B和CAN FD模式、CAN 2.0B模式等多種工作模式,適應(yīng)不同的應(yīng)用場(chǎng)景。
- FIFO配置:擁有31個(gè)FIFO,可配置為發(fā)送或接收FIFO,還有一個(gè)發(fā)送隊(duì)列(TXQ)和一個(gè)帶有32位時(shí)間戳的發(fā)送事件FIFO(TEF)。
- 消息處理:支持消息傳輸優(yōu)先級(jí)設(shè)置,可根據(jù)優(yōu)先級(jí)位字段或消息ID進(jìn)行排序;可編程自動(dòng)重傳嘗試次數(shù),可設(shè)置為無(wú)限次、3次或禁用。
- 過(guò)濾功能:配備32個(gè)靈活的過(guò)濾和屏蔽對(duì)象,可對(duì)標(biāo)準(zhǔn)ID + 前18位數(shù)據(jù)位或擴(kuò)展ID進(jìn)行過(guò)濾。
- 電氣特性:工作電壓范圍為2.7至5.5V,有源電流在5.5V、40 MHz CAN時(shí)鐘下最大為20 mA,睡眠電流典型值為10 μA。
2.2 典型應(yīng)用
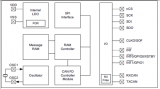
MCP2517FD可直接與工作電壓在2.7V至5.5V的微控制器接口,同時(shí)可直接連接高速CAN FD收發(fā)器,無(wú)需外部電平轉(zhuǎn)換器。在典型應(yīng)用中,微控制器通過(guò)SPI接口對(duì)CAN FD控制器進(jìn)行配置和控制,MCP2517FD通過(guò)INT、INT0和INT1向微控制器發(fā)送中斷信號(hào),CLKO引腳為微控制器提供時(shí)鐘。
三、CAN FD控制器模塊
3.1 FIFO配置與管理
每個(gè)FIFO可配置為發(fā)送或接收FIFO,F(xiàn)IFO控制模塊負(fù)責(zé)跟蹤FIFO的頭和尾,并計(jì)算用戶地址。對(duì)于發(fā)送FIFO,用戶地址指向RAM中存儲(chǔ)下一個(gè)發(fā)送消息數(shù)據(jù)的地址;對(duì)于接收FIFO,用戶地址指向RAM中讀取下一個(gè)接收消息數(shù)據(jù)的地址。用戶通過(guò)增加FIFO的頭/尾來(lái)通知FIFO消息已寫入或讀取。
3.2 工作模式
CAN FD控制器模塊具有多種工作模式,包括配置模式、正常CAN FD模式、正常CAN 2.0模式、睡眠模式、監(jiān)聽模式、受限操作模式、內(nèi)部和外部回環(huán)模式等。不同的模式適用于不同的應(yīng)用場(chǎng)景,例如在調(diào)試階段可使用回環(huán)模式進(jìn)行自我測(cè)試。
3.3 消息處理
- 發(fā)送隊(duì)列(TXQ):是一個(gè)特殊的發(fā)送FIFO,根據(jù)隊(duì)列中存儲(chǔ)的消息ID進(jìn)行消息發(fā)送。
- 發(fā)送事件FIFO(TEF):存儲(chǔ)已發(fā)送消息的ID,并可對(duì)消息進(jìn)行時(shí)間戳標(biāo)記。
- CAN FD位流處理器(BSP):實(shí)現(xiàn)CAN FD協(xié)議的介質(zhì)訪問(wèn)控制,負(fù)責(zé)位流的序列化和反序列化、CAN FD幀的編碼和解碼、介質(zhì)訪問(wèn)管理、幀確認(rèn)以及錯(cuò)誤檢測(cè)和信號(hào)處理。
- 中斷處理:當(dāng)接收到新消息或消息發(fā)送成功時(shí),CAN FD控制器模塊會(huì)生成中斷信號(hào)。
四、內(nèi)存組織
MCP2517FD的內(nèi)存主要包括MCP2517FD特殊功能寄存器(SFR)、CAN FD控制器模塊SFR和消息內(nèi)存(RAM)。SFR為32位寬,LSB位于較低地址。
4.1 MCP2517FD特定寄存器
包括OSC、IOCON、CRC、ECCCON和ECCSTAT等寄存器,用于控制振蕩器、I/O引腳、CRC校驗(yàn)和ECC糾錯(cuò)等功能。
4.2 CAN FD控制器模塊寄存器
涵蓋配置寄存器、中斷和狀態(tài)寄存器、錯(cuò)誤和診斷寄存器、FIFO控制和狀態(tài)寄存器以及過(guò)濾配置和控制寄存器等,用于對(duì)CAN FD控制器模塊進(jìn)行全面配置和監(jiān)控。
4.3 消息內(nèi)存
MCP2517FD包含2 KB的RAM,用于存儲(chǔ)消息對(duì)象,包括發(fā)送消息對(duì)象、接收消息對(duì)象和TEF對(duì)象。消息對(duì)象的數(shù)量和數(shù)據(jù)字節(jié)數(shù)可根據(jù)需要進(jìn)行配置,F(xiàn)IFOs和消息對(duì)象只能在配置模式下進(jìn)行配置。RAM采用錯(cuò)誤糾正碼(ECC)進(jìn)行保護(hù),支持單錯(cuò)誤糾正(SEC)和雙錯(cuò)誤檢測(cè)(DED)。
五、SPI接口
MCP2517FD通過(guò)SPI接口與微控制器進(jìn)行通信,SPI時(shí)鐘速度最高可達(dá)20 MHz,支持SPI模式0,0和1,1。SFR和消息內(nèi)存(RAM)可通過(guò)SPI指令進(jìn)行訪問(wèn)。
5.1 SPI指令格式
每個(gè)SPI指令以nCS引腳拉低開始,4位命令和12位地址在SCK的上升沿移入SDI。寫指令時(shí),數(shù)據(jù)位在SCK的上升沿移入SDI;讀指令時(shí),數(shù)據(jù)位在SCK的下降沿從SDO移出。指令以nCS引腳拉高結(jié)束。
5.2 寄存器訪問(wèn)
SFR訪問(wèn)是字節(jié)導(dǎo)向的,可一次讀寫任意數(shù)量的數(shù)據(jù)字節(jié),地址在每個(gè)數(shù)據(jù)字節(jié)后自動(dòng)遞增。消息內(nèi)存(RAM)訪問(wèn)是字導(dǎo)向的,每次讀寫必須是4字節(jié)的倍數(shù)。
5.3 帶CRC的SPI命令
為了檢測(cè)或避免SPI通信中的位錯(cuò)誤,提供了帶CRC的SPI命令,包括READ_CRC、WRITE_CRC和WRITE_SAFE等。CRC計(jì)算使用CRC - 16/USB多項(xiàng)式,可有效檢測(cè)SPI通信中的錯(cuò)誤。
六、振蕩器與I/O配置
6.1 振蕩器
MCP2517FD的振蕩器系統(tǒng)可生成SYSCLK,用于CAN FD控制器模塊和RAM訪問(wèn)。時(shí)間參考可以是外部40、20或4 MHz的晶體、陶瓷諧振器或外部時(shí)鐘。OSC寄存器用于控制振蕩器,可啟用PLL將4 MHz時(shí)鐘乘以10,內(nèi)部40/20 MHz時(shí)鐘可進(jìn)行二分頻,生成的時(shí)鐘可通過(guò)CLKO引腳輸出。
6.2 I/O配置
IOCON寄存器用于配置I/O引腳,可選擇CLKO/SOF引腳的功能,將TXCAN配置為推挽或開漏輸出,將INT0和INT1配置為GPIO或收發(fā)器的發(fā)送和接收中斷引腳,INT0/GPIO0/XSTBY還可用于自動(dòng)控制收發(fā)器的待機(jī)引腳。
七、電氣規(guī)格與性能曲線
7.1 電氣規(guī)格
MCP2517FD的電氣規(guī)格涵蓋絕對(duì)最大額定值、DC特性、CLKOUT和SOF的AC特性、晶體振蕩器的AC特性、CAN比特率、CAN RX過(guò)濾的AC特性、SPI的AC特性以及溫度規(guī)格等方面,為工程師在設(shè)計(jì)電路時(shí)提供了重要的參考依據(jù)。
7.2 性能曲線
文檔中提供了一些典型性能曲線,如平均IDDS與溫度的關(guān)系曲線,雖然這些曲線是基于有限樣本的統(tǒng)計(jì)總結(jié),不具有測(cè)試或保證性,但可作為設(shè)計(jì)參考。
八、封裝信息
MCP2517FD提供14引腳的SOIC和VDFN封裝,文檔中詳細(xì)介紹了封裝的標(biāo)記信息、尺寸規(guī)格和推薦的焊盤圖案,方便工程師進(jìn)行PCB設(shè)計(jì)。
九、總結(jié)
MCP2517FD作為一款功能強(qiáng)大的CAN FD控制器,具有高速數(shù)據(jù)傳輸、靈活的配置選項(xiàng)、可靠的錯(cuò)誤檢測(cè)和糾正機(jī)制等優(yōu)點(diǎn)。通過(guò)深入了解其特性、功能模塊、內(nèi)存組織、SPI接口等方面的知識(shí),電子工程師可以更好地將其應(yīng)用于各種CAN FD通信系統(tǒng)中。在實(shí)際設(shè)計(jì)過(guò)程中,工程師還需要根據(jù)具體的應(yīng)用需求和電氣規(guī)格進(jìn)行合理的電路設(shè)計(jì)和參數(shù)配置,以確保系統(tǒng)的穩(wěn)定性和可靠性。
你在使用MCP2517FD的過(guò)程中遇到過(guò)哪些挑戰(zhàn)?又是如何解決的呢?歡迎在評(píng)論區(qū)分享你的經(jīng)驗(yàn)和見解。
-
MCP2517FD
+關(guān)注
關(guān)注
0文章
4瀏覽量
3727
發(fā)布評(píng)論請(qǐng)先 登錄
【RK3562J開發(fā)筆記】MCP2518FD外部CAN-FD控制器的調(diào)試方法
MCP2517FD振蕩器
CAN總線的系統(tǒng)架構(gòu)
Microchip宣布提供業(yè)界第一款外部CAN靈活數(shù)據(jù)速率(CAN FD)控制器MCP2517FD
CAN FD控制器MCP2517FD的主要特性 PCB正面布局
帶SPllnterface的外部CAN FD控制器MCP2517FD的英文數(shù)據(jù)手冊(cè)
如何使用MCP251XFD CAN FD主板作為演示板來(lái)評(píng)估MCP2517FD器件概述
MCP2517FD CAN FD控制器的詳細(xì)資料和數(shù)據(jù)手冊(cè)免費(fèi)下載
CAN FD Driver-裸機(jī)模式

MCP2517FD小尺寸CAN FD控制器規(guī)格書
MCP251863 CAN FD控制器技術(shù)解析與應(yīng)用指南



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論