 從靜態到動態:MEMS IMU如何定義新一代測繪傳感器
從靜態到動態:MEMS IMU如何定義新一代測繪傳感器

什么是IMU
IMU,即慣性測量單元,是一種能夠自主測量物體運動狀態的核心傳感器。它不依賴衛星、不依賴外界信號,搭載算法實時輸出三維姿態與運動信息,已成為現代測繪裝備不可或缺的關鍵部件。
IMU在測繪領域的作用
在測繪作業中,ER-MIMU-062最核心的作用是利用原始感知數據解算提供實時、高精度姿態。傳統測繪設備必須嚴格整平才能保證精度,流程繁瑣、效率低下。搭載 IMU 后,經解算后設備可自動補償傾斜、晃動、顛簸帶來的誤差,實現免整平、動態測量。
具體應用:抗遮擋與自主導航、高頻運動補償、傾斜補償與效率提升等。
核心參數
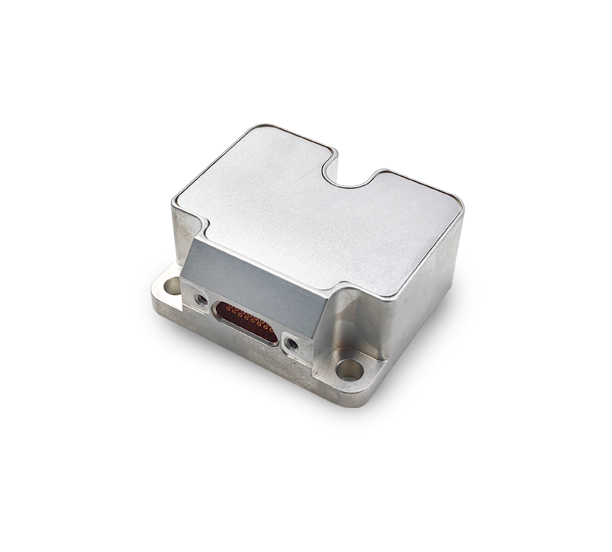
ER-MIMU-062六軸MEMS IMU,尺寸僅為 38.6mm×44.8mm×25.5mm,重量≤70g,2W低功耗,可作為測繪領域的高性價比選型方案。
核心硬件組成
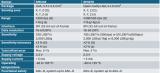
ER-MIMU-062陀螺儀參數:測量三軸角速度,零偏不穩定性<0.03度/小時、零偏穩定性(10s 1σ)低至<0.15度/小時,陀螺角隨機走<0.01°/√h,標度因數(25°C):28000LSB/deg/s,滿足絕大多數測繪需求。
ER-MIMU-062加速度計參數:測量三軸加速度變化,零偏重復性僅為100ug,零偏穩定性(10s 1σ)降低至<50ug,II類加速度計非線性系數<100ug/g2。
典型組合方案與算法
GNSS/IMU 緊組合:通過卡爾曼濾波融合GPS位置與 IMU運動數據,兼顧絕對精度與動態響應,是移動測繪的主流方案。
IMU+LiDAR-SLAM:在無 GPS 環境下,ER-MIMU-062解算后提供初始姿態與運動先驗,抑制SLAM 漂移,實現室內 / 地下高精度三維建模。
IMU+多波束測深:ER-MIMU-062輸出的橫滾、俯仰數據,直接用于多波束條帶拼接與水深校正,是海洋測繪的核心環節。
總結
ER-MIMU-062依托精準原始數據,確保在無人機、手持測桿等動態平臺上,實時輸出高精度的俯仰角、橫滾角。在野外測繪作業中,它可自動補償測桿傾斜,實現免整平測量,將單次作業時間從數分鐘壓縮至數十秒,大幅提升野外作業效率。同時以慣性技術為核心,保證在無外部信號時仍能提供可靠的位置與姿態數據。在隧道貫通測量或地下管線測繪中,它作為核心傳感器,確保作業不中斷,成圖精度不受影響。
審核編輯 黃宇
-
傳感器
+關注
關注
2576文章
55028瀏覽量
791245 -
mems
+關注
關注
129文章
4475瀏覽量
198785 -
IMU
+關注
關注
6文章
416瀏覽量
47871
發布評論請先 登錄
佛瑞亞海拉推出新一代智能電池傳感器
探秘HAL 39xy:新一代3D位置傳感器的卓越表現
IMU應用領域及技術前景探討
博世MEMS傳感器的主要應用及明星產品
從防水到降噪:MEMS聲學傳感器如何重塑小音響體驗
導遠科技車規級MEMS IMU芯片獲自主可控認定

選擇合適的MEMS振動傳感器?

MEMS慣性傳感器?都有哪些種類?MEMS慣性傳感器有哪些特點
從追趕到領跑,瑞之辰解碼MEMS傳感器的國產加速度

博世MEMS傳感器快問快答
從技術到戰略,解碼瑞之辰MEMS傳感器進取之路

博世MEMS傳感器的應用領域
從晶圓到芯片:MEMS傳感器是這樣被制造出來的!(20+高清大圖)
MEMS聲敏傳感器分類與應用
電容式MEMS壓力傳感器有哪些優點?純國產電容式MEMS壓力傳感器芯片有哪些?



 工商網監
工商網監
評論