 MAX5063:125V/2A高速半橋MOSFET驅動器深度解析
MAX5063:125V/2A高速半橋MOSFET驅動器深度解析

MAX5062/MAX5063/MAX5064:125V/2A高速半橋MOSFET驅動器深度解析
在電子工程領域,MOSFET驅動器的性能對于電源轉換和電機控制等應用至關重要。今天,我們就來詳細探討一下MAXIM公司的MAX5062/MAX5063/MAX5064這三款125V/2A高速半橋MOSFET驅動器。
文件下載:MAX5063.pdf
一、產品概述
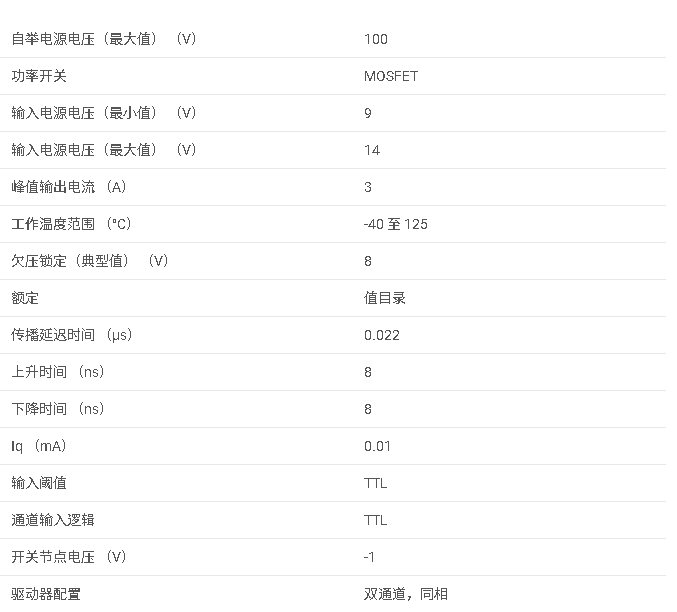
MAX5062/MAX5063/MAX5064是為高壓應用設計的高頻、125V半橋n溝道MOSFET驅動器,能夠獨立控制高端和低端MOSFET。其輸入到輸出的典型傳播延遲為35ns,且驅動器之間的傳播延遲匹配在3ns(典型值)以內。這種低且匹配的傳播延遲,加上高源/灌電流能力和熱增強封裝,使這些器件非常適合用于高功率、高頻的電信電源轉換器。125V的最大輸入電壓范圍,為電信標準中100V的輸入瞬態要求提供了充足的余量。此外,片上可靠的自舉二極管連接在VDD和BST之間,無需外部離散二極管。
二、產品特性亮點
2.1 高電壓與寬電壓范圍
-
高達125V的輸入操作能力,8V至12.6V的VDD輸入電壓范圍,能適應多種復雜的電源環境。
2.2 強大的驅動能力
-
2A的峰值源和灌電流驅動能力,可快速驅動MOSFET,提高開關速度。
2.3 低延遲與匹配性
-
典型35ns的傳播延遲,且驅動器之間保證8ns的傳播延遲匹配,確保高端和低端MOSFET的同步性。
2.4 可編程功能
-
MAX5064具有可編程的先斷后通(BBM)時序,可在16ns至95ns之間進行編程,有效避免直通電流。
2.5 高頻性能
-
MAX5064在驅動100nC柵極電荷時,組合開關頻率可達1MHz。
2.6 多種邏輯輸入類型
-
提供CMOS(VDD / 2)或TTL邏輯電平輸入,并帶有遲滯功能,適應不同的控制信號。
2.7 低功耗與小尺寸
- 低200μA的電源電流,且有8引腳SO、熱增強SO和12引腳薄QFN等多種封裝可供選擇。
三、應用場景廣泛
3.1 電信電源領域
-
適用于電信半橋電源、全橋轉換器、有源鉗位正激轉換器等,其高電壓、低延遲和高驅動能力能夠滿足電信設備對電源穩定性和高效性的要求。
3.2 電力轉換領域
-
可用于雙開關正激轉換器和電源模塊,提高電源轉換效率,減少能量損耗。
3.3 電機控制領域
- 能夠快速準確地控制電機的開關,實現電機的高效運行。
四、電氣特性詳解
4.1 電源供應特性
- 工作電壓范圍:其工作電源電壓范圍為 8V 至 12.6V,能適應多種電源環境。不過要注意,VDD 到地或 BST 到 HS 的電壓不能超過 13.2V,否則可能損壞器件。
- 靜態和工作電流:不同型號在靜態(無開關動作)和工作(500kHz 開關頻率、VDD = +12V 等條件下)時的電源電流有所差異。例如,MAX5062/MAX5063 的 VDD 靜態電流典型值為 70μA,最大值 140μA;而 MAX5064_ 的 VDD 靜態電流典型值為 120μA,最大值 260μA。工作電流方面,當開關頻率為 500kHz、VDD = +12V 時,VDD 和 BST 的工作電流最大值均為 3mA。
- 欠壓鎖定(UVLO):高低側驅動器都具備欠壓鎖定功能。低側驅動器的 UVLO_LOW 閾值以地為參考,當 VDD 低于 6.8V 時,兩個驅動器輸出拉低;高側驅動器有自己的 UVLO_HIGH 閾值,以 HS 為參考,當 BST 相對于 HS 低于 6.4V 時,DH 拉低。UVLO 典型滯回值為 0.5V。這一特性在實際應用中能有效防止設備在低電壓下不穩定工作,提高了系統的可靠性。但在選擇外部電容時要謹慎,比如選擇約為 MOSFET 總柵極電容 20 倍的電容,避免 DH 輸出在開關時出現意外振蕩。
4.2 邏輯輸入特性
- 輸入邏輯電平:MAX5062/MAX5064A 采用 CMOS (VDD / 2) 邏輯輸入,而 MAX5063/MAX5064B 具有 TTL 兼容邏輯輸入。邏輯輸入信號獨立于 VDD,可承受最高 15V 的電壓尖峰,能適配不同的邏輯信號源,為設計帶來了很大的靈活性。
- 輸入滯后:TTL 和 CMOS 邏輯輸入分別具有 400mV 和 1.6V 的滯后,能夠有效避免信號轉換過程中的雙脈沖問題,提高了系統的抗干擾能力。
- 輸入阻抗和電容:邏輯輸入為高阻抗引腳,輸入電容低至 2.5pF,減少了負載,提高了開關速度。同時非反相輸入通過 1MΩ 電阻內部下拉至地,反相輸入通過 1MΩ 電阻內部上拉至 VDD,避免輸入引腳浮空導致的不穩定。
4.3 驅動器輸出特性
- 輸出電阻:高低側驅動器輸出級采用低 RDS_ON 的 p 通道和 n 通道器件(圖騰柱結構),在不同溫度和負載條件下,輸出電阻有所不同。例如,當 VDD = 12V、驅動 100mA 電流時,在 +25°C 和 +125°C 下,高側驅動器的源極輸出電阻 RON_HP 分別典型為 2.5Ω 和 3.3Ω,漏極輸出電阻 RON_HN 分別典型為 2.1Ω 和 2.8Ω;低側驅動器類似。較低的輸出電阻意味著更高的源極和漏極電流以及更快的開關速度。
- 峰值輸出電流:典型峰值源極和漏極電流為 2A,能夠為 MOSFET 提供足夠的驅動能力,確保 MOSFET 快速開關。
- 擊穿前導通邏輯:內部 p 通道和 n 通道 MOSFET 具有 1ns 的擊穿前導通邏輯,避免了它們之間的交叉導通,減少了直通電流,降低了工作電源電流以及 VDD 上的尖峰,提高了系統效率和穩定性。
4.4 內部自舉二極管特性
- 內部二極管連接在 VDD 和 BST 之間,與外部連接在 BST 和 HS 之間的自舉電容配合使用。當 DL 低側開關導通時,二極管從 VDD 為電容充電;當高側驅動器導通,HS 被拉高時,二極管隔離 VDD。其典型正向壓降為 0.9V,典型關斷/導通時間為 10ns。若需要更低的 VDD 到 BST 壓降,可以在 VDD 和 BST 之間連接外部肖特基二極管。
4.5 開關特性
- 上升和下降時間:在不同負載電容下,驅動器的上升和下降時間不同。例如,當負載電容 CL = 1000pF 時,上升和下降時間典型值約為 7ns;當 CL = 5000pF 時,變為約 33ns;CL = 10000pF 時,約為 65ns。
- 導通和關斷傳播延遲時間:對于 CMOS 和 TTL 輸入類型,在 CL = 1000pF 條件下,導通和關斷傳播延遲時間不同。CMOS 輸入時典型為 30ns,最大值 55ns;TTL 輸入時典型為 35ns,最大值 63ns。并且驅動器之間的延遲匹配在 8ns 以內,確保了高低側驅動器的同步性。
- 擊穿前導通時間調整(僅 MAX5064):該功能可將高低側開關之間的延遲(擊穿前導通時間 tBBM)從 16ns 調整到 95ns,通過連接 10kΩ 到 100kΩ 的電阻到 BBM 引腳實現。計算公式為 (t{BBM}=8 ns times(1 + R{BBM} / 10 kΩ)),延遲匹配誤差計算公式為 (t_{BBMERROR } = 0.15 × t{BBM}+t{MATCH }) ,其中 (t{MATCH }) 為傳播延遲匹配。這一功能有效避免了半橋和同步降壓拓撲中高低側開關同時導通產生的直通電流問題,但在低 tBBM 值時,由于 BBM 模塊中固定比較器延遲的存在,會有較高的百分比誤差。
4.6 最小脈沖寬度
- 采用單觸發電平轉換器架構來實現低傳播延遲,但會導致輸出端出現最小(高或低)脈沖寬度。為避免在低占空比窄脈沖時無外部 BBM 延遲情況下出現直通,DH 最小高脈沖寬度要低于 DL 最小低脈沖寬度;在高占空比(接近 100%)時,DH 最小低脈沖寬度必須高于 DL 最小低脈沖寬度以避免重疊和直通。在沒有外部 BBM 延遲的情況下,MAX5062/MAX5063/MAX5064 可能會有大約 40ns 的重疊,因此建議在 INH 路徑中添加外部延遲,確保 INH 處看到的最小低脈沖寬度始終長于 tPW - MIN 。
五、設計注意事項
5.1 電源旁路和接地
-
電源旁路和接地處理不當,會導致電源下降和接地偏移,影響驅動器的延遲和過渡時間,甚至干擾其他共享交流接地回路的電路。因此,要在盡可能靠近器件的位置并聯一個或多個 0.1μF 陶瓷電容,將 VDD 旁路到地(MAX5062/MAX5063)或 PGND(MAX5064),并使用接地平面來減小接地回路電阻和串聯電感。同時,將外部 MOSFET 盡可能靠近 MAX5062/MAX5063/MAX5064 放置,以進一步減小電路板電感和交流路徑電阻。
5.2 功率耗散
-
器件的功率耗散主要來自內部升壓二極管、nMOS 和 pMOS FET 的功率損耗。對于電容性負載,總功率耗散計算公式為 (P{D}=(C{L} × V{D D}^{2} × f{S W})+(I{D D O}+I{B S T O}) × V{D D}) ,使用內部升壓二極管時的功耗與使用外部肖特基二極管時不同。在實際應用中,要根據不同的封裝規格,將總功耗控制在最大允許值以下,例如 12 引腳 TQFN 封裝在 (T{A}=+70^{circ}C) 環境下最大允許功耗為 1.951W。
5.3 電路板布局
- 由于驅動器在開關 MOSFET 柵極處產生大電流以形成快速上升和下降沿,高 di/dt 效應會導致嚴重的振鈴問題。因此在設計 PCB 時,要確保 VDD 電壓(相對于地)或 BST 電壓(相對于 HS)不超過 13.2V,在 VDD 到地(MAX5062/MAX5063)或 PGND(MAX5064)以及 BST 到 HS 之間盡可能靠近器件放置一個或多個低 ESL 的 0.1μF 去耦陶瓷電容,且電容值至少為所驅動柵極電容的 20 倍。同時,要注意減小器件與驅動的 MOSFET 柵極之間的交流電流回路的物理距離和阻抗,并將 TQFN(MAX5064)或 SO(MAX5062C/D 和 MAX5063C/D)封裝的外露焊盤焊接到大面積銅平面上,以實現額定功率耗散。
綜上所述,MAX5062/MAX5063/MAX5064 系列高速半橋 MOSFET 驅動器憑借其出色的性能和廣泛的應用場景,為電子工程師在設計各類電源和電機控制電路時提供了強大的工具。但在實際應用中,工程師需要深入理解其各項特性和設計注意事項,才能充分發揮其優勢,設計出高效、穩定的電路系統。你在使用這些驅動器的過程中遇到過哪些挑戰呢?歡迎在評論區分享。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
MOSFET驅動器
+關注
關注
4文章
216瀏覽量
26782 -
電氣特性
+關注
關注
0文章
155瀏覽量
10267
發布評論請先 登錄
相關推薦
熱點推薦
探索MAX5062:高性能半橋MOSFET驅動器的卓越之選
組件,其性能直接影響著整個系統的效率、穩定性和可靠性。今天,我們將深入探討MAXIM推出的MAX5062/MAX5063/MAX5064系列125V/
MAX20050:2A同步降壓LED驅動器的全面解析
MAX20050–MAX20053:2A同步降壓LED驅動器的全面解析 在汽車外部照明等領域,高亮度LED
UCC27211A:高性能半橋驅動器的深度解析與應用指南
UCC27211A:高性能半橋驅動器的深度解析與應用指南 在電子工程師的日常工作中,選擇合適的
深度解析UCC27301A:高性能半橋驅動器的理想之選
深度解析UCC27301A:高性能半橋驅動器的理想之選 在電子工程師的日常工作中,選擇合適的器件
汽車級高速半橋柵極驅動器 UCC2773x-Q1:設計與應用解析
汽車級高速半橋柵極驅動器 UCC2773x-Q1:設計與應用解析 在電子工程領域,高速、高效且可
LM25101 具有 8V UVLO 和 TTL 輸入的 3A、2A 或 1A 半橋柵極驅動器數據手冊
LM25101 高壓柵極驅動器設計用于驅動高壓側和 采用同步降壓或半橋配置的低側 N 溝道 MOSFET。



 工商網監
工商網監
評論