 具身智能在工業巡檢場景落地方案粗淺解析
具身智能在工業巡檢場景落地方案粗淺解析

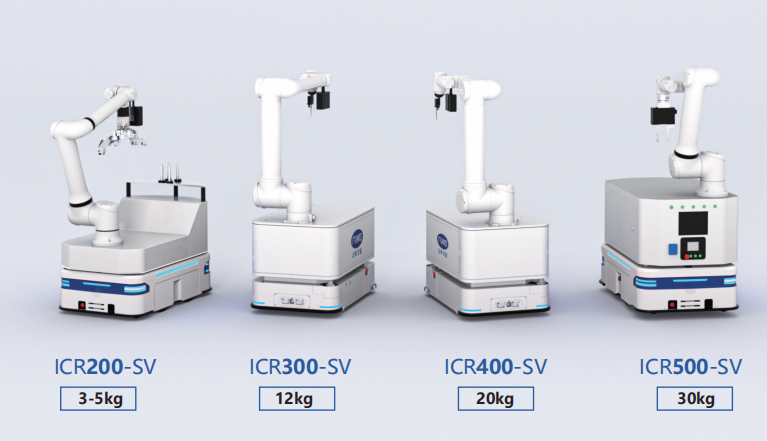
無論是工廠通道例行巡檢的輪式機器人、管廊深處監測隱患的軌道機器人、穿越復雜地形的四足機器人,還是產線上操作的人形機器人—— 工業巡檢具身智能體正以多元形態呈現 ,然而如何讓感知、決策與執行真正一體化?規模化應用有哪些行業痛點與關鍵瓶頸?這是行業當前面臨的共同挑戰。我們將打破單一形態機器人的局限,剖析其一體化的智能范式與共通的行業痛點。
一、行業痛點:形態多樣,系統割裂
當前巡檢機器人行業面臨的核心痛點主要集中在兩大方面:
? 形態多樣但各自為陣,難以形成場景閉環
- 傳統巡檢方案以輪式、軌道機器人為主,方案成熟,但僅適用于平坦工廠地面、預設的軌道線路、標準的工業場景等結構化環境;2) 新形態四足機器人、人形機器人等嶄露頭角,多數仍停留在遙控操作階段,自主性不足,僅支持簡單的直線規劃,無法適應復雜動態場景的規劃
? 系統生態碎片化,智能化升級路徑受阻
- 用戶需對接多家供應商以采購不同形態機器人,每類機器人擁有獨立的控制系統,導致數據孤島、控制平臺分散、無法統一調度,陷入“機器人越多,管理越亂”的維護困境。2) 市場亟需能夠打破形態邊界、提供統一智能控制的平臺化解決方案。
二、破局之道:具身智能系統平臺
面對上述行業困境,旗晟創新提出了 具身智能系統 ,該系統以具身智能系統為核心,構建監測感知、態勢預警和人機共融三大模塊,打造“一核三翼”的運維安防應用體系,以統一智能控制平臺為不同形態機器人賦能。
1.核心優勢一:一腦適配,全面賦能
該具身智能系統基于模塊化軟件架構與自適應控制算法,可快速適配輪式、軌道式、四足以及人形等不同形態的巡檢機器人,打破“一機一系統”的割裂局面,一套平臺即可實現全形態機器人的統一調度、協同作業與集中管理。
2.核心優勢二:自主智能,精準導航
該具身智能系統深度融合激光、慣性導航等多模態感知數據,為各類巡檢機器人提供精準的環境理解、運動規劃與控制策略,包括輪式機器人的平面導航、軌道機器人的精準循跡,還是四足機器人的復雜地形適應行走,讓機器人從“遙控執行” 邁向“自主決策” 。
3.核心優勢三:開放生態,無縫對接
該具身智能系統提供 標準化API接口 ,支持與企業內部MES、ERP等第三方系統對接,實現任務指令下發與巡檢數據回傳的全面閉環。并可集成大語言模型(LLM)等AI能力,構建人機協同、互動交互的智能運維新模式。**
三、成功實踐:賦能行業領先者
旗晟智腦系統已成功應用于電力巡檢、能源化工、先進制造、市政交通、公共安全等多個領域。除自研的輪式巡檢機器人與軌道巡檢機器人外,系統已成功 賦能多家行業知名品牌 ,實現了跨形態的技術驗證與規模化落地:
? 宇樹科技B2四足機器人:搭載旗晟智腦后,在工業車間實現自主導航與障礙跨越
? 云深處X30四足機器人:在復雜園區環境中穩定執行巡檢任務
? 宇樹H1人形機器人:通過高級運動控制與雙手協調算法,拓展在柔性裝配、設備作等場景的應用潛力
這些實踐不僅驗證了旗晟智腦系統的跨形態適配能力,更體現出其對不同機器人形態特殊優勢的深度挖掘,讓輪式機器人更高效、四足機器人更自主、人形機器人更靈活,實現1+1>2的協同效應。
四、未來展望:統一生態,共創智能新紀元
具身智能的終極目標,是讓機器在物理世界中獲得類人的感知、思考與行動能力。邁向這一未來的關鍵一步,在于構建一個能兼容異構硬件、承載共性智能的統一“ 具身智腦 ”。這不僅是技術的升級,更是范式的轉變:產業競爭正從單一設備的性能競賽,轉向如何打造向下兼容多樣“身體”、向上孵化海量應用的智能生態。未來,不管輪式巡檢機器人、四足巡檢機器人還是人形機器人,都將在統一的智能平臺下協同作業,實現任務、數據與決策的深度融合。這種 “一腦多態” 的架構,正是破解當前規模化落地中成本、集成與數據孤島等核心瓶頸的必然路徑。
了解更多旗晟智腦系統如何賦能您的機器人解決方案,歡迎關注我們,獲取行業最新動態與技術深度解析。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31073瀏覽量
222176 -
具身智能
+關注
關注
0文章
389瀏覽量
857
發布評論請先 登錄
《具身智能發展報告(2025年)》

openKylin與OpenLoong共推具身智能產業落地
具身智能交流會
2025開放原子開發者大會具身智能分論壇成功舉辦
黑芝麻智能與云深處科技達成戰略合作,共推具身智能平臺全球市場應用
阿普奇攜KiWiBot 30控制器亮相具身智能大會,賦能場景化落地

四維圖新旗下六分科技與智身科技達成戰略合作

融合計算突破界限,英特爾大小腦融合架構加速具身智能進化
英特爾? 具身智能大小腦融合方案發布:構建具身智能落地新范式

?具身智能(Embodied AI)?解析
激活具身智能創新加速度,九章云極DataCanvas公司領航CEAI 2025中國具身智能大會




 工商網監
工商網監
評論