 AWRL6432:汽車雷達傳感器的新選擇
AWRL6432:汽車雷達傳感器的新選擇

AWRL6432:汽車雷達傳感器的新選擇
在汽車電子領域,雷達傳感器對于實現先進駕駛輔助系統(ADAS)和自動駕駛至關重要。今天,我們就來深入探討一下德州儀器(TI)推出的AWRL6432單芯片57 - 64GHz汽車雷達傳感器。
文件下載:awrl6432.pdf
一、核心特性
(一)FMCW收發器
AWRL6432集成了PLL、發射器、接收器、基帶和ADC,覆蓋57GHz - 64GHz頻段,具有7GHz連續帶寬。它有3個接收通道和2個發射通道,典型探測范圍可達25m,每個發射器的典型輸出功率為11dBm,典型噪聲系數為11dB,在1MHz FMCW操作時典型相位噪聲為 - 89dBc/Hz,IF帶寬為5MHz,采用實值接收通道。基于分數N PLL的超精確線性調頻引擎和每個發射器的二進制移相器,為雷達性能提供了有力保障。
(二)處理單元
- ARM? M4F?內核:帶有單精度FPU,時鐘頻率為160MHz,可進行高效的數據處理。
- TI雷達硬件加速器(HWA 1.2):用于FFT、對數幅度和CFAR操作,時鐘頻率為80MHz,能大大減輕主處理器的負擔,提高處理效率。
(三)低功耗模式
支持空閑模式和深度睡眠模式等多種低功耗模式,通過時鐘門控和關閉內部IP塊來實現低功耗睡眠模式,并且可以保留應用程序映像或RF配置文件等內容,有效降低功耗。
(四)電源管理
支持1.8V和3.3V IO,內置LDO網絡以增強電源抑制比(PSRR)。有BOM優化和電源優化兩種模式,1.8V IO模式可使用一或兩個電源軌,3.3V IO模式可使用兩或三個電源軌,滿足不同的設計需求。
(五)校準與自檢
內置固件(ROM)和片上校準系統,能夠實現自動校準和自檢,保證傳感器的穩定性和準確性。
(六)主機接口
提供UART、CAN - FD、SPI、LIN等多種接口,以及用于原始ADC樣本捕獲的RDIF(雷達數據接口),還支持QSPI、I2C、JTAG、GPIOs、PWM等其他接口,方便與外部設備進行通信和數據交互。
(七)內部存儲器
擁有1MB的片上RAM,可配置的L3共享內存用于雷達數據立方體,數據和代碼RAM為(512/640/768KB),滿足不同應用場景下的數據存儲需求。
(八)功能安全
專為功能安全應用開發,硬件完整性符合ASIL - B標準,采用FCCSP封裝,尺寸為6.45mm x 6.45mm,通過了AEC Q - 100認證,適用于對安全要求較高的汽車應用。
(九)時鐘源
主時鐘采用40.0MHz晶體,支持外部驅動的40.0MHz時鐘(方波/正弦波),內部有32kHz振蕩器用于低功耗操作,工作結溫范圍為 - 40°C至125°C,適應不同的工作環境。
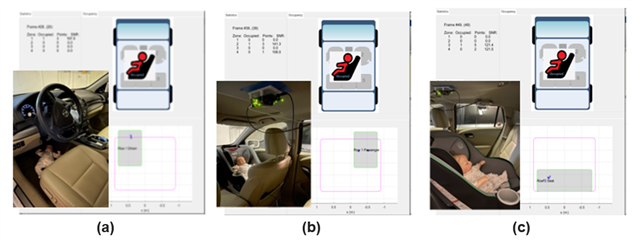
二、應用場景
AWRL6432適用于多種汽車應用場景,如駕駛員生命體征監測、安全帶提醒、車內感知、入侵者檢測、兒童存在檢測、基于手勢的人機交互(HMI)和乘員檢測等。這些應用能夠提高汽車的安全性和舒適性,為駕乘人員提供更好的體驗。
三、功能模塊詳解
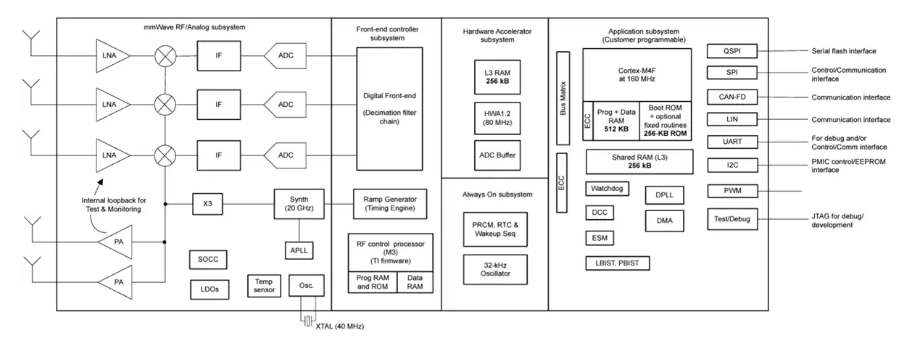
(一)系統架構
該傳感器主要分為四個電源域:
- RF/模擬子系統:包含所有用于發射和接收RF信號的RF和模擬組件。
- 前端控制器子系統(FECSS):由ARM Cortex M3處理器負責雷達前端的配置、控制和校準。
- 應用子系統(APPSS):實現了用戶可編程的ARM Cortex M4,可進行自定義控制和汽車接口應用。其中,TOPSS是APPSS電源域的一部分,包含時鐘和電源管理子模塊。
- 硬件加速器(HWA):輔助APPSS進行常見的雷達處理,如FFT、恒虛警率(CFAR)、縮放和壓縮等操作,提高處理速度。
(二)電源拓撲
AWRL6432支持兩種獨特的電源拓撲,即BOM優化和電源優化模式。
- BOM優化模式:可以使用一個1.8V調節器或一個3.3V和一個1.8V調節器供電,1.2V電源軌由內部生成。
- 電源優化模式:可以使用兩個(1.8V和1.2V)或三個(3.3V、1.8V和1.2V)外部電源軌供電,1.2V電源軌由外部提供。
(三)系統拓撲
- 外設模式:由外部MCU控制,大部分處理工作在外部MCU上完成,計算和功率需求相對較高,外部MCU大部分時間保持活躍。
- 自主模式:可作為完整的傳感器,內部的M4F應用處理器完成所有處理工作,并通過LIN/CAN與外部主機通信,將處理結果發送給主機,以采取相應的行動。
四、性能參數
(一)絕對最大額定值
對各種電源電壓、RF輸入輸出功率、輸入輸出電壓范圍等都有明確的限制,如VDD(1.2V數字電源)的范圍為 - 0.5V至1.4V,RX1 - 3(RF輸入)和TX1 - 2(RF輸出)的外部施加功率最大為10dBm等。在設計時,必須嚴格遵守這些參數,以確保設備的安全和可靠性。
(二)ESD額定值
符合人體模型(HBM)和帶電設備模型(CDM)的ESD標準,所有引腳的HBM為±2000V,CDM所有引腳為±500V,角引腳為±750V,這表明該設備具有較好的靜電防護能力。
(三)推薦工作條件
規定了各種電源電壓、輸入輸出電壓的推薦范圍,如VDD(1.2V數字電源)推薦為1.14V至1.26V,VIOIN(I/O電源)在3.3V模式下為3.135V至3.465V,1.8V模式下為1.71V至1.89V等。遵循這些條件可以保證設備在最佳狀態下工作。
(四)RF規格
接收器噪聲系數、1dB壓縮點、最大增益、增益范圍等參數,以及發射器的輸出功率、功率回退范圍等都有詳細的規定。例如,接收器噪聲系數在57至63.9GHz頻段內有特定要求,發射器輸出功率典型值為11dBm。這些參數直接影響雷達的探測性能。
(五)CPU規格
應用子系統(M4F系列)時鐘速度為160MHz,具有512KB的緊密耦合內存(程序 + 數據)、256KB的共享L3內存和256KB專用于HWA的L3內存,為數據處理提供了充足的資源。
(六)熱阻特性
對于FCCSP封裝(AMF0102A),給出了結到殼、結到板、結到自由空氣等熱阻參數,如結到殼熱阻RΘJC為8.5°C/W,結到板熱阻RΘJB為6.2°C/W等。了解這些參數有助于進行散熱設計,確保設備在高溫環境下正常工作。
五、與其他雷達設備對比
通過與AWRL1432、AWR6843AOP等雷達設備的對比,可以更清楚地看到AWRL6432的特點。例如,在天線封裝(AOP)方面,AWRL6432沒有集成天線;在接收通道數量上,它有3個,而部分其他設備有4個;在RF頻率范圍上,AWRL6432為57至64GHz,與其他設備有所不同。在功能安全方面,AWRL6432符合ASIL - B標準。通過對比,工程師可以根據具體的設計需求選擇最合適的雷達設備。
六、引腳配置與信號描述
文檔中詳細給出了FCCSP引腳圖和各種信號的描述,包括模擬信號、CAN信號、時鐘信號等。同時,還提供了引腳復用表,說明了每個引腳在不同模式下的功能和狀態。在進行硬件設計時,需要仔細參考這些信息,確保引腳連接正確,避免出現信號干擾等問題。
七、設計注意事項
(一)電源供應
要確保所有外部電壓軌在復位解除之前穩定,遵循正確的電源上電順序。不同的電源拓撲(BOM優化和電源優化)有不同的電源需求,需要根據實際情況進行選擇。
(二)時鐘源
需要外部40MHz晶體或振蕩器作為初始啟動和內部APLL的參考。在使用外部時鐘時,要注意其相位噪聲要求。同時,要合理選擇負載電容,確保滿足晶體制造商的要求。
(三)接口配置
不同的接口(如SPI、LIN、CAN - FD等)有各自的時序和電氣特性要求。例如,SPI在控制器模式和外設模式下的時序條件不同,LIN模塊可以配置為SCI或LIN模式,具有不同的波特率和通信協議。在設計時,要嚴格按照接口規范進行配置,以保證通信的穩定性和準確性。
(四)布局和布線
在PCB設計中,要注意內部LDO輸出去耦電容的選擇和布局,確保寄生電感和電阻在規定范圍內。同時,要合理布局各個模塊,減少信號干擾,提高系統的性能。
八、總結
AWRL6432單芯片汽車雷達傳感器憑借其豐富的功能、高性能的處理能力和低功耗特性,為汽車雷達應用提供了一個優秀的解決方案。它適用于多種汽車場景,能夠滿足不同的設計需求。作為電子工程師,在使用AWRL6432進行設計時,需要充分了解其特性和參數,遵循設計規范,以確保設計出高質量、可靠的汽車雷達系統。你在汽車雷達設計中遇到過哪些挑戰呢?歡迎在評論區分享你的經驗和想法。
-
汽車雷達傳感器
+關注
關注
0文章
6瀏覽量
1340 -
功能特性
+關注
關注
0文章
22瀏覽量
85
發布評論請先 登錄
TI的60GHz AWRL6432 雷達傳感器滿足 Euro NCAP 設計要求
汽車雷達傳感器的解決方案
使用低功耗 60GHz 毫米波雷達傳感器滿足 Euro NCAP 兒童存在檢測要求
德州儀器發布低功耗 60GHz 毫米波雷達傳感器
使用低功耗60GHz毫米波雷達傳感器滿足Euro NCAP兒童存在檢測要求
德州儀器發布一款低功耗60GHz毫米波雷達傳感器
AWRL1432單芯片76GHz至81GHz汽車雷達傳感器數據表

AWRL6432單芯片57GHz至64GHz汽車雷達傳感器數據表
Texas Instruments AWRL6432-Q1汽車mmWave雷達傳感器數據手冊
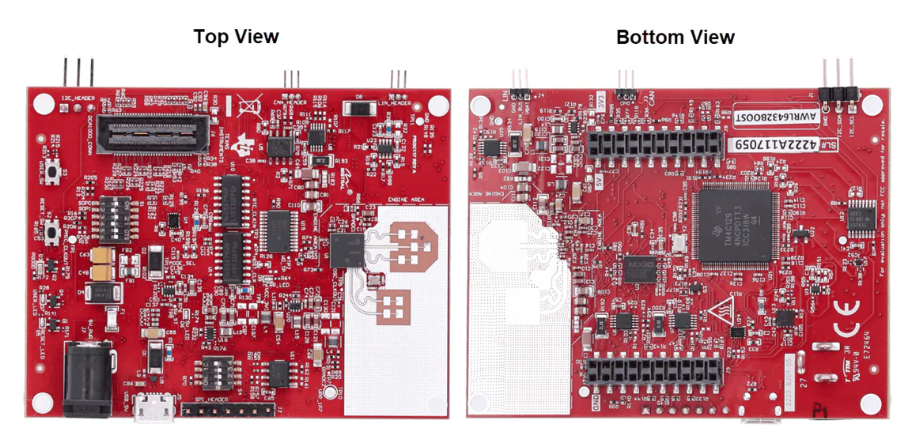
Texas Instruments AWRL6432BOOST BoosterPack?評估模塊 (EVM)數據手冊



 工商網監
工商網監
評論