 NVIDIA Cosmos世界基礎模型如何塑造機器人未來
NVIDIA Cosmos世界基礎模型如何塑造機器人未來

在這一演進過程中,世界模型逐漸成為連接高層智能與底層執行的關鍵基礎設施。通過對環境狀態及其時間演化進行建模,世界模型使機器人系統能夠在受控環境中進行仿真、訓練與決策推演,從而為機器人在真實物理世界中實現可靠的感知、決策與行動閉環提供支撐。
NVIDIA Cosmos:面向物理 AI 的世界基礎模型
NVIDIA Cosmos 包含一系列先進的預訓練多模態模型,為開發者構建虛擬世界、實現智能推理,提供了一套靈活、可擴展的世界建模基礎設施。
在 Cosmos 平臺中,Cosmos Predict是面向世界狀態預測的核心基礎模型,通過視頻級生成與預測,Cosmos Predict 使物理 AI 系統能夠在給定當前觀測和條件的情況下,對未來狀態進行推演。其前瞻性的世界模型能力,為仿真、規劃及閉環決策環節提供高效支撐。最新版本的 Cosmos Predict 2.5 能夠僅基于單張圖像和文本提示,生成最長 30 秒的未來世界狀態視頻,這一能力為物理 AI 系統提供了高質量的合成數據來源。該模型還能進一步優化機器人的迭代式策略訓練場景。
智元機器人 Genie Envisioner:
基于 Cosmos 實現感知到行動的端到端閉環
基于 NVIDIA Cosmos,智元機器人近期發布了具身智能世界模型平臺 Genie Envisioner(GE),系統性地打通了機器人從“感知”到“決策”再到“行動”的端到端閉環。
GE 以統一的視頻生成式世界模型為核心,將策略學習、評估與仿真能力整合在同一框架之中,使世界模型能夠深度參與機器人決策與控制過程,成為具身智能系統中的關鍵基礎組成部分。
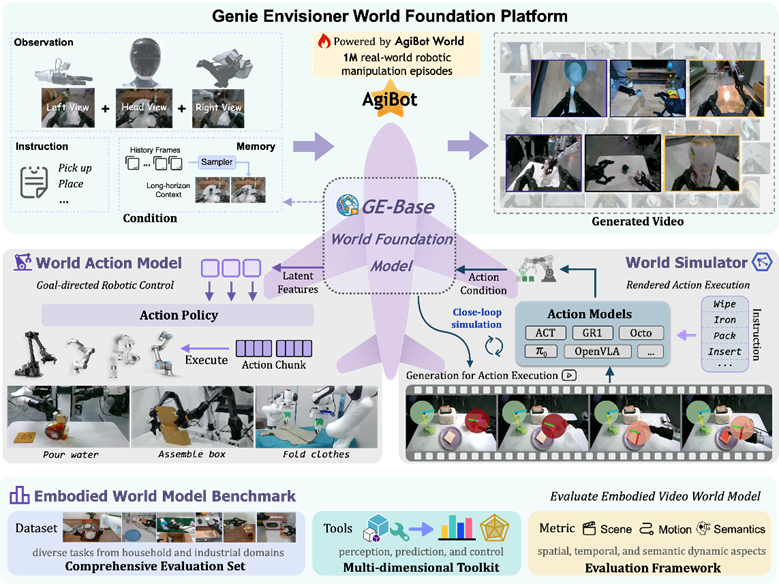
具身智能世界模型平臺 Genie Envisioner(GE)
*圖片來源于 Genie Envisioner 項目網站
在 GE 的整體架構中,GE-Sim模塊承擔著視頻級世界仿真的關鍵角色。該模塊需要在多視角條件下生成具備物理一致性和時間穩定性的環境演化結果,同時還必須對機器人的動作指令做出準確響應。
這種動作條件世界模型(action-conditioned world model)對底層視覺先驗、動態建模能力以及多步驟穩定性提出了極高要求,是具身智能從概念走向落地過程中最具挑戰性的技術環節之一。
NVIDIA Cosmos Predict 2,加速 GE-Sim 迭代升級
面對物理 AI 和具身智能場景在規模、多樣性與動態復雜性上的挑戰,智元機器人團隊引入 NVIDIA Cosmos Predict 2,為 GE-Sim 提供強大的通用視覺與物理先驗能力。
通過將 Cosmos Predict 2 深度集成至自研的動作條件世界模型架構中,并結合 AgiBot World 數據集開展針對性的后訓練,團隊顯著加快了 GE-Sim 的迭代節奏,并持續提升仿真質量與系統穩定性。
借助 Cosmos 世界基礎模型的基礎能力,GE-Sim 生成的多視角視頻能夠精準響應機器人的動作指令。Cosmos 提供的通用視覺與物理先驗,使模型能夠覆蓋海量具身場景的多樣性。在此基礎上,GE 架構進一步結合機器人動作條件與任務約束,使生成結果既符合真實物理規律,又能夠直接服務于機器人決策與執行。
基于 NVIDIA Cosmos 的 GE-Sim 視頻仿真演示:模型根據機器人動作指令生成未來幀,并在多視角下保持高度一致性
基于 Cosmos 世界基礎模型優化后的 GE-Sim,已于 2025 年 11 月正式發布并在 GitHub 開源,為具身智能社區提供了可復用、可擴展的世界仿真基礎設施。
不止于仿真:Cosmos 如何塑造機器人未來?
Cosmos 世界基礎模型正在成為物理 AI 的基礎模型層,為機器人提供:
高質量合成數據生成,降低真實數據收集與標注成本;
安全可靠的仿真環境,支持大規模強化學習與策略調試;
可擴展的世界先驗,加速不同場景的模型適配與部署。
通過將世界狀態預測能力系統化、模型化,Cosmos 讓機器人不僅在“感知現在”,更在“理解變化”和“推演未來”,從而在真實世界中做出更穩健、更智能的決策。
Cosmos 將持續作為世界模型的核心底座,與生態伙伴共同推動具身智能從實驗室走向真實世界。
-
NVIDIA
+關注
關注
14文章
5592瀏覽量
109716 -
AI
+關注
關注
91文章
39755瀏覽量
301355 -
模型
+關注
關注
1文章
3751瀏覽量
52099
原文標題:構建物理 AI 的引擎:NVIDIA Cosmos
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
利用NVIDIA Cosmos開放世界基礎模型加速物理AI開發
小蘿卜機器人的故事
NVIDIA 利用全新開源模型與仿真庫加速機器人研發進程

NVIDIA三臺計算機解決方案如何協同助力機器人技術
NVIDIA通過全新 Omniverse庫、Cosmos物理AI模型及AI計算基礎設施,為機器人領域開啟新篇章

利用NVIDIA Cosmos模型訓練通用機器人

通過NVIDIA Cosmos模型增強機器人學習

如何本地部署NVIDIA Cosmos Reason-1-7B模型
NVIDIA GTC巴黎亮點:全新Cosmos Predict-2世界基礎模型與CARLA集成加速智能汽車訓練
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

借助NVIDIA技術提升機器人的移動和全身控制能力

NVIDIA Cosmos加速機器人和自動駕駛汽車物理AI發展




 工商網監
工商網監
評論