 中科芯CKS32F107XX系列MCU的串行外設接口介紹
中科芯CKS32F107XX系列MCU的串行外設接口介紹

MCU微課堂
CKS32F107XX系列串行外設接口介紹
第六十九期 2026.01.19
SPI簡介
SPI協議是由摩托羅拉公司提出的通訊協議(Serial Peripheral Interface),即串行外圍設備接口,是一種高速全雙工的通信總線。它在芯片的管腳上只占用四根線,節約了芯片的管腳,同時為PCB在布局上節省了空間。正是出于這種簡單易用的特性,現在越來越多的芯片集成了這種通信協議,它被廣泛地使用在ADC、LCD、FLASH等設備與MCU之間。
中科芯CKS32F107xx系列產品擁有3路SPI接口,允許芯片與外部設備以半/全雙工、同步、串行方式通信。此接口可以被配置成主模式,并為外部從設備提供通信時鐘(SCK)。支持以多主配置的方式工作。下面就SPI相關特性進行介紹。
SPI主要特征
SPI特征
● 3線全雙工同步傳輸
● 帶或不帶第三根雙向數據線的雙線單工同步傳輸
● 8或16位傳輸幀格式選擇
● 主或從操作
● 支持多主模式
● 8個主模式波特率預分頻系數(最大為fPCLK/2)
● 從模式頻率(最大為fPCLK/2)
● 主模式和從模式的快速通信
● 主模式和從模式下均可以由軟件或硬件進行NSS管理:主/從操作模式的動態改
● 可編程的數據順序,MSB在前或LSB在前
● 可觸發中斷的專用發送和接收標志
● SPI總線忙狀態標志
● 支持可靠通信的硬件CRC
─ 在發送模式下,CRC值可以被作為最后一個字節發送
─ 在全雙工模式中對接收到的最后一個字節自動進行CRC校驗
● 可觸發中斷的主模式故障、過載以及CRC錯誤標志
● 支持DMA功能的1字節發送和接收緩沖器:產生發送和接受請求
SPI功能描述
SPI概述
SPI的方框圖見下圖。
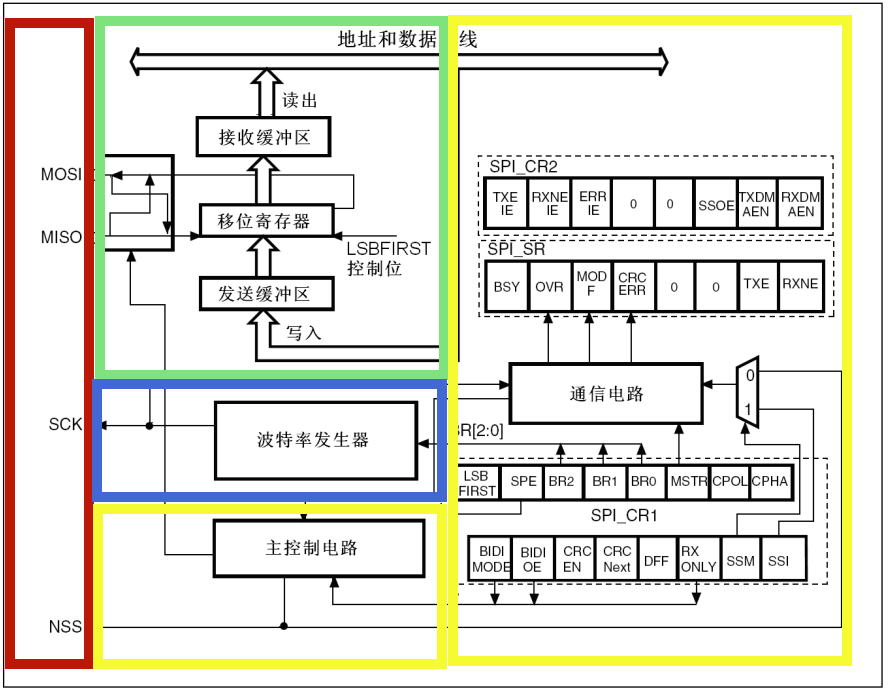
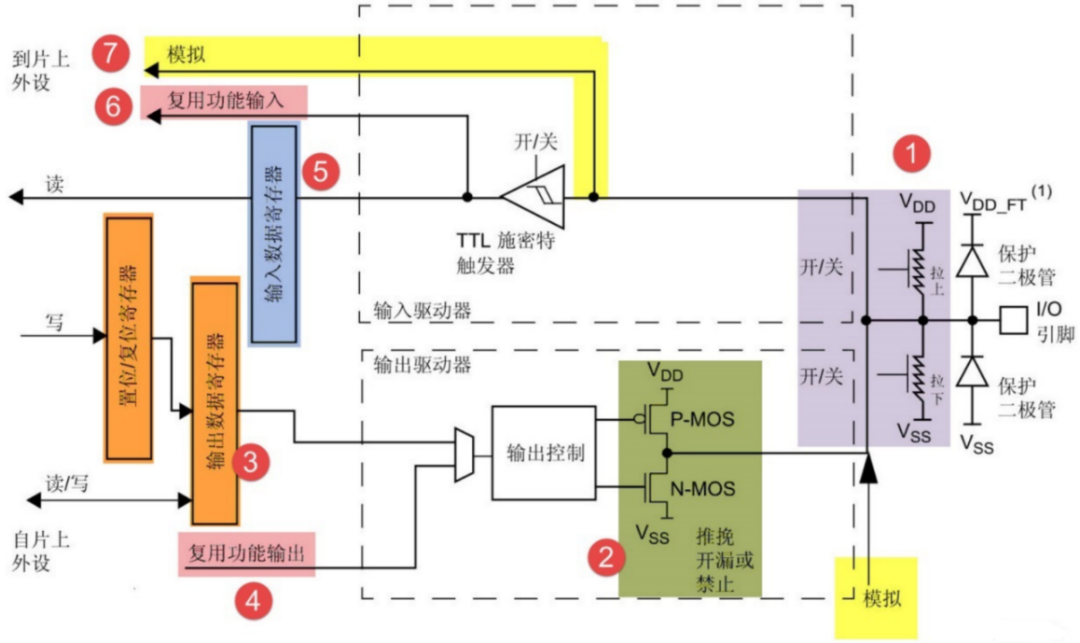
圖1 SPI方框圖
圖中的①處是SPI的引腳MOSI、MISO、SCK、NSS。CKS32F107xx系列芯片通過以上四個引腳將SPI通訊信號引出到不同GPIO引腳上,使用時必須配置到這些指定的引腳。關于GPIO引腳的復用功能可以查閱芯片數據手冊。各個引腳的作用介紹如下:
●NSS:從設備選擇信號線,常稱為片選信號線。當有多個SPI從設備與SPI主機相連時,設備的其它信號線SCK、MOSI及MISO同時并聯到相同的SPI總線上,即無論有多少個從設備,都共同只使用這3條總線;而每個從設備都有獨立的一條NSS信號線,當主機要選擇從設備時,把該從設備的NSS信號線設置為低電平,該從設備即被選中,即片選有效,接著主機開始與被選中的從設備進行SPI通訊。
●SCK:時鐘信號線,用于通訊數據同步。它由通訊主機產生,決定了通訊的速率,不同的設備支持的最高時鐘頻率不一樣,兩個設備之間通訊時,通訊速率受限于低速設備。
●MOSI:主設備輸出/從設備輸入引腳。主機的數據從這條信號線輸出,從機由這條信號線讀入主機發送的數據,即這條線上數據的方向為主機到從機。
●MISO:主設備輸入/從設備輸出引腳。主機從這條信號線讀入數據,從機的數據由這條信號線輸出到主機,即在這條線上數據的方向為從機到主機。
圖中的②處是SCK線的時鐘信號,由波特率發生器根據“控制寄存器CR1”中的BR[0:2]位控制,該位是對fpclk時鐘的分頻因子,對fpclk的分頻結果就是SCK引腳的輸出時鐘頻率。
圖中的③處是SPI的數據控制邏輯。SPI的MOSI及MISO都連接到數據移位寄存器上,數據移位寄存器的內容來源于接收緩沖區及發送緩沖區以及MISO、MOSI線。當向外發送數據的時候,數據移位寄存器以“發送緩沖區”為數據源,把數據一位一位地通過數據線發送出去;當從外部接收數據的時候,數據移位寄存器把數據線采樣到的數據一位一位地存儲到“接收緩沖區”中。通過寫SPI的“數據寄存器DR”把數據填充到發送緩沖區中,通過“數據寄存器DR”,可以獲取接收緩沖區中的內容。其中數據幀的長度可以通過“控制寄存器CR1”的“DFF位”配置成8位及16位模式;配置“LSBFIRST位”可選擇MSB先行還是LSB先行。
圖中的④處是SPI的整體控制邏輯。整體控制邏輯負責協調整個SPI外設,控制邏輯的工作模式根據我們配置的“控制寄存器(CR1/CR2)”的參數而改變,基本的控制參數包括SPI模式、波特率、LSB先行、主從模式、單雙向模式等等。在外設工作時,控制邏輯會根據外設的工作狀態修改“狀態寄存器(SR)”,我們只要讀取狀態寄存器相關的寄存器位,就可以了解SPI的工作狀態了。除此之外,控制邏輯還根據要求,負責控制產生SPI中斷信號、DMA請求及控制NSS信號線。實際應用中,我們一般不使用SPI外設的標準NSS信號線,而是更簡單地使用普通的GPIO,軟件控制它的電平輸出。
CKS32F107xx系列產品SPI配置:
接下來我們講解如何利用CKS32F107xx系列固件庫來完成對SPI的配置使用。跟其它外設一樣,CKS32標準庫提供了SPI初始化結構體及初始化函數來配置SPI外設。了解初始化結構體后我們就能對SPI外設運用自如了,結構體如下圖所示:
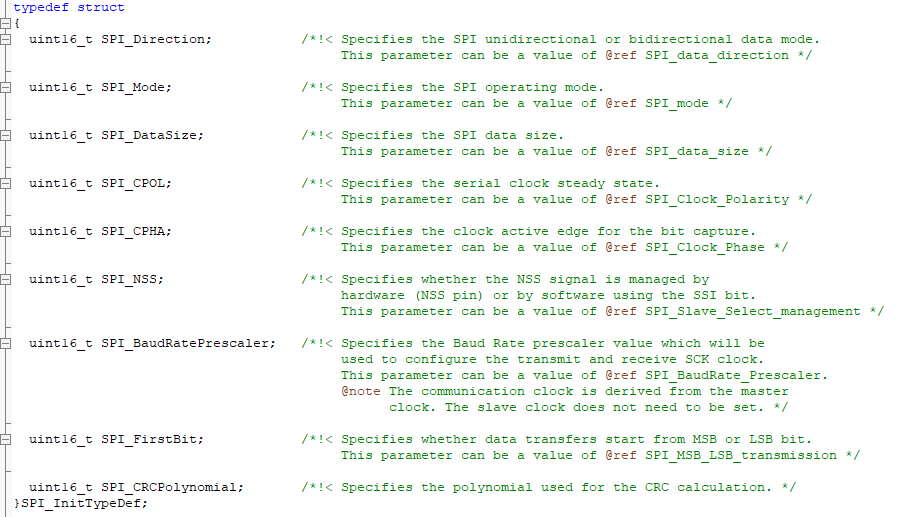
圖2 SPI配置結構體
結構體中各個函數變量的介紹及初始化時可被賦的值如下:
1) SPI_Direction:該函數設置SPI的通訊方向,可設置為雙線全雙工(SPI_Direction_2Lines_FullDuplex),雙線只接收(SPI_Direction_2Lines_RxOnly),單線只接收(SPI_Direction_1Line_Rx)、單線只發送模式(SPI_Direction_1Line_Tx)。
2) SPI_Mode:該函數設置SPI工作在主機模式(SPI_Mode_Master)或從機模式(SPI_Mode_Slave),這兩個模式的最大區別為SPI的SCK信號線的時序,SCK的時序是由通訊中的主機產生的。若被配置為從機模式,CKS32的SPI外設將接受外來的SCK信號:
3) SPI_DataSize:該函數可以選擇SPI通訊的數據幀大小是為8位(SPI_DataSize_8b)還是16位(SPI_DataSize_16b)。
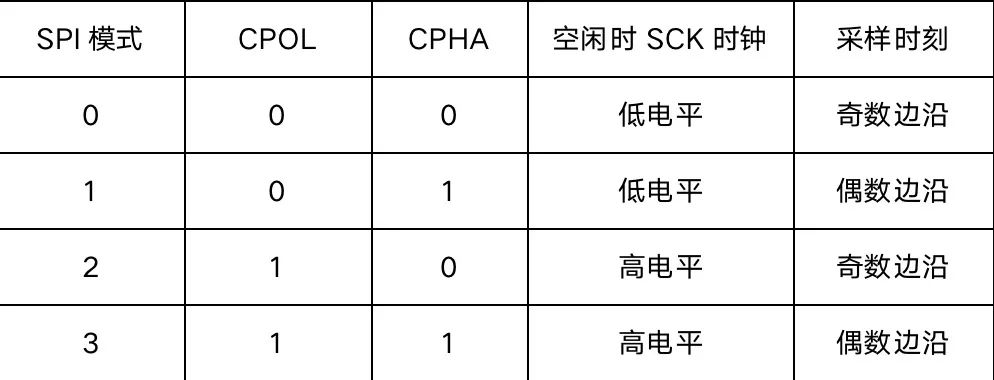
4) SPI_CPOL和SPI_CPHA:這兩個函數配置SPI的時鐘極性CPOL和時鐘相位CPHA,前面講過這兩個配置影響到SPI的通訊模式。時鐘極性CPOL成員可設置為高電平(SPI_CPOL_High)或低電平(SPI_CPOL_Low)。時鐘相位CPHA則可以設置為SPI_CPHA_1Edge(在SCK的奇數邊沿采集數據)或SPI_CPHA_2Edge(在SCK的偶數邊沿采集數據),具體組合設置方式可參考圖2。
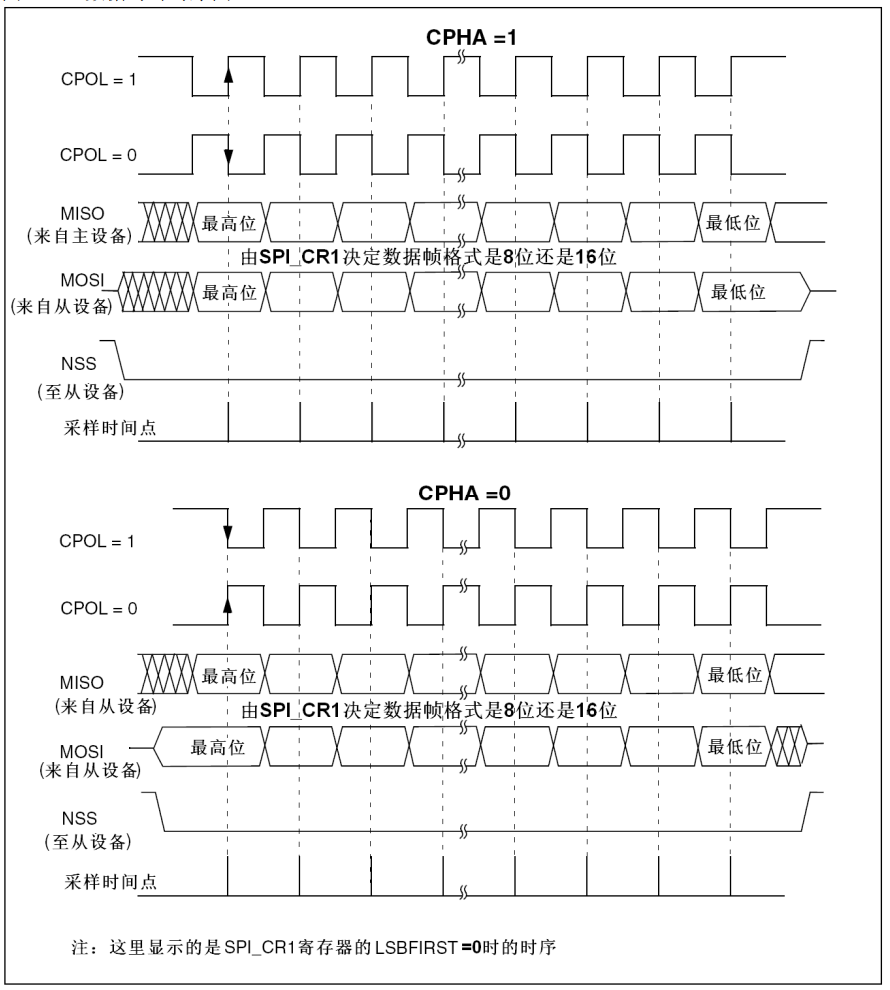
圖3 數據時鐘時序圖
5) SPI_NSS:該函數配置NSS引腳的使用模式,可以選擇為硬件模式(SPI_NSS_Hard)與軟件模式(SPI_NSS_Soft),在硬件模式中的SPI片選信號由SPI硬件自動產生,而軟件模式則需要我們自己把相應的GPIO端口拉高或置低產生非片選和片選信號。實際中軟件模式應用比較多。
6) SPI_BaudRatePrescaler:該函數設置波特率分頻因子,分頻后的時鐘即為SPI的SCK信號線的時鐘頻率。這個成員參數可設置為fpclk的2、4、8、16、32、64、128、256分頻。可選的值如下圖所示:
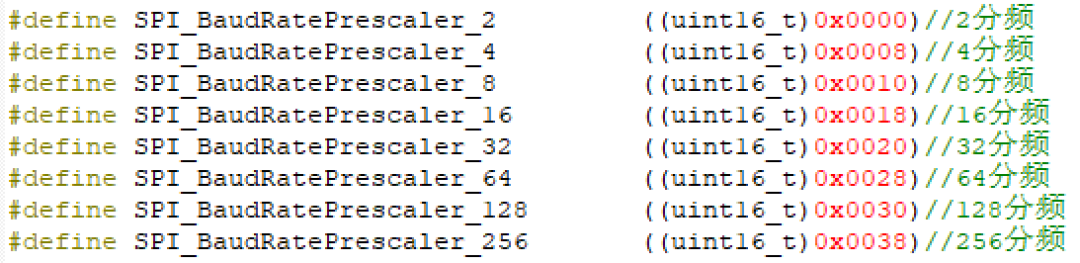
圖4 SPI波特率分頻
7) SPI_FirstBit:所有串行的通訊協議都會有MSB先行(高位數據在前)還是LSB先行(低位數據在前)的問題,而CKS32F107VET6的SPI模塊可以通過這個結構體,對這個特性編程控制。

圖5 SPI數據先行方式
8) SPI_CRCPolynomial:這是SPI的CRC校驗中的多項式,若我們使用CRC校驗時,就使用這個參數(多項式),來計算CRC的值。
配置完這些結構體成員的值,調用庫函數SPI_Init即可把結構體的配置寫入到寄存器中。
SPI外設主要可通過主模式和從模式兩種方式進行實現,現在就兩個模式分別進行講解。
配置SPI為主模式
在主配置時,在SCK腳產生串行時鐘。
配置步驟:
(1)通過SPI_CR1寄存器的BR[2:0]位定義串行時鐘波特率;
(2)選擇CPOL和CPHA位,定義數據傳輸和串行時鐘間的相位關系(見圖4);
(3)設置DFF位來定義8位或16位數據幀格式;
(4)配置SPI_CR1寄存器的LSBFIRST位定義幀格式;
(5)如果需要NSS引腳工作在輸入模式,硬件模式下,在整個數據幀傳輸期間應把NSS腳連接到高電平;在軟件模式下,需設置SPI_CR1寄存器的SSM位和SSI位。如果NSS引腳工作在輸出模式,則只需設置SSOE位;
(6)必須設置MSTR位和SPE位(只當NSS腳被連到高電平,這些位才能保持置位)。在這個配置中,MOSI引腳是數據輸出,而MISO引腳是數據輸入;
數據發送過程
當寫入數據至發送緩沖器時,發送過程開始。在發送第一個數據位時,數據字被并行地(通過內部總線)傳入移位寄存器,而后串行地移出到MOSI腳上;MSB在先還是LSB在先,取決于SPI_CR1寄存器中的LSBFIRST位的設置。數據從發送緩沖器傳輸到移位寄存器時TXE標志將被置位,如果設置了SPI_CR1寄存器中的TXEIE位,將產生中斷。
數據接受過程
對于接收器來說,當數據傳輸完成時:
●傳送移位寄存器里的數據到接收緩沖器,并且RXNE標志被置位。
●如果設置了SPI_CR2寄存器中的RXNEIE位,則產生中斷。在最后采樣時鐘沿,RXNE位被設置,在移位寄存器中接收到的數據字被傳送到接收緩沖器。讀SPI_DR寄存器時,SPI設備返回接收緩沖器中的數據。讀SPI_DR寄存器將清除RXNE位。一旦傳輸開始,如果下一個將發送的數據被放進了發送緩沖器,就可以維持一個連續的傳輸流。在試圖寫發送緩沖器之前,需確認TXE標志應該為‘1’。
注:在NSS硬件模式下,從設備的NSS輸入由NSS引腳控制或另一個由軟件驅動的GPIO引腳控制。
具體初始化代碼如下:
void SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
/* Configure SPI1 Pins PA.4 NSS(software); PA.5 SCK; PA.6 MISO; PA.7 MOSI--------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_WriteBit( GPIOA, GPIO_Pin_4, Bit_SET );
/* Configure SPI1 -----------------------------------------------------------*/
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128;
SPI_InitStruct.SPI_Direction= SPI_Direction_2Lines_FullDuplex;
SPI_InitStruct.SPI_Mode = SPI_Mode_Master;
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStruct.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStruct.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStruct);
SPI_Cmd(SPI1, ENABLE);
}
單字節收發函數代碼如下:
uint8_t CKS_SPI_Tx_Rx_Byte(uint8_t data)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, data);
while( SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPI1);
}
配置SPI為從模式
在從模式下,SCK引腳用于接收從主設備來的串行時鐘。SPI_CR1寄存器中BR[2:0]的設置不影響數據傳輸速率。
注:建議在主設備發送時鐘之前使能SPI從設備,否則可能會發生意外的數據傳輸。在通信時鐘的第一個邊沿到來之前或正在進行的通信結束之前,從設備的數據寄存器必須就緒。在使能從設備和主設備之前,通信時鐘的極性必須處于穩定的數值。請按照以下步驟配置SPI為從模式:
配置步驟
(1)設置DFF位以定義數據幀格式為8位或16位。
(2)選擇CPOL和CPHA位來定義數據傳輸和串行時鐘之間的相位關系。為保證正確的數據傳輸,從設備和主設備的CPOL和CPHA位必須配置成相同的方式。
(3)幀格式(SPI_CR1寄存器中的LSBFIRST位定義的“MSB在前”還是“LSB在前”)必須與主設備相同。
(4)硬件模式下(參考從選擇(NSS)腳管理部分),在完整的數據幀(8位或16位)傳輸過程中,NSS引腳必須為低電平。在NSS軟件模式下,設置SPI_CR1寄存器中的SSM位并清除SSI位。
(5)清除MSTR位、設置SPE位(SPI_CR1寄存器),使相應引腳工作于SPI模式下。在這個配置中,MOSI引腳是數據輸入,MISO引腳是數據輸出。
數據發送過程
在寫操作中,數據字被并行地寫入發送緩沖器。當從設備收到時鐘信號,并且在MOSI引腳上出現第一個數據位時,發送過程開始(注:此時第一個位被發送出去)。余下的位(對于8位數據幀格式,還有7位;對于16位數據幀格式,還有15位)被裝進移位寄存器。當發送緩沖器中的數據傳輸到移位寄存器時,SPI_SP寄存器的TXE標志被設置,如果設置了SPI_CR2寄存器的TXEIE位,將會產生中斷。
數據接受過程
對于接收器,當數據接收完成時:
● 移位寄存器中的數據傳送到接收緩沖器,SPI_SR寄存器中的RXNE標志被設置。
● 如果設置了SPI_CR2寄存器中的RXNEIE位,則產生中斷。在最后一個采樣時鐘邊沿后,RXNE位被置‘1’,移位寄存器中接收到的數據字節被傳送到接收緩沖器。當讀SPI_DR寄存器時,SPI設備返回這個接收緩沖器的數值。讀SPI_DR寄存器時,RXNE位被清除。
上述部分是SPI的主/從模式理論配置過程,下面開始對實際程序中的代碼配置進行分解。程序較為簡單,使用單顆CKS32F107VET6的SPI1外設作為主機,SPI2外設作為從機,通過兩路外設互相通信(先SPI1發,SPI2收;再SPI2發,SPI1收)的方式實現。
本講中,我們以簡單的數據接收發送為例進行配置,具體初始化代碼如下:
uint8_t CKS_SPI_Tx_Rx_Byte(uint8_t data)
{
while (SPI_I2S_GetFlagStatus(SPI1,
void SPI_Slaver_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStruct;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1 | RCC_APB2Periph_AFIO, ENABLE);
/* Configure SPI1 Pins PA.4 NSS(software); PA.5 SCK; PA.6 MISO; PA.7 MOSI--------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure SPI1 -----------------------------------------------------------*/
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64;
SPI_InitStruct.SPI_Direction= SPI_Direction_2Lines_FullDuplex;
SPI_InitStruct.SPI_Mode = SPI_Mode_Slave;
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStruct.SPI_CPOL = SPI_CPOL_High;
SPI_InitStruct.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStruct.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStruct);
SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_RXNE, ENABLE);
SPI_Cmd(SPI1, ENABLE);
/* Configure SPI1 INT------------------------------------------------------*/
NVIC_InitStructure.NVIC_IRQChannel = SPI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
) == RESET);
SPI_I2S_SendData(SPI1, data);
while( SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPI1);
}
SPI中斷函數:
void SPI1_IRQHandler(void)
{
if(SPI_I2S_GetITStatus(SPI1, SPI_I2S_IT_RXNE) != RESET)
{
SPI_Rx = SPI_I2S_ReceiveData(SPI1);
if(SPI_Rx <= 0x04)
{
SPI_I2S_SendData(SPI1, SPI_Tx[SPI_Rx]);
}
else
{
SPI_I2S_SendData(SPI1, SPI_Tx[0x05]);
}
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}
SPI_I2S_ClearITPendingBit(SPI1, SPI_I2S_IT_RXNE);
}
}
-
mcu
+關注
關注
147文章
19004瀏覽量
400227 -
adc
+關注
關注
100文章
7533瀏覽量
556429 -
SPI協議
+關注
關注
0文章
24瀏覽量
8848 -
串行外設接口
+關注
關注
0文章
24瀏覽量
4192
原文標題:MCU微課堂|CKS32F107XX系列串行外設接口介紹
文章出處:【微信號:中科芯MCU,微信公眾號:中科芯MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
中科芯CKS32F107XX系列MCU的獨立看門狗介紹

中科芯CKS32F107XX系列MCU的窗口看門狗介紹

中科芯CKS32F107XX系列MCU的bxCAN介紹

MCU微課堂|CKS32F4xx系列產品時鐘配置
中科芯CKS32F107XX系列MCU的以太網介紹(二)

中科芯CKS32F030K6T6 高性能32位RISC內核MCU 程序兼容STM32F030K6T6
CKS32F107xx系列時鐘系統具體配置方法講解

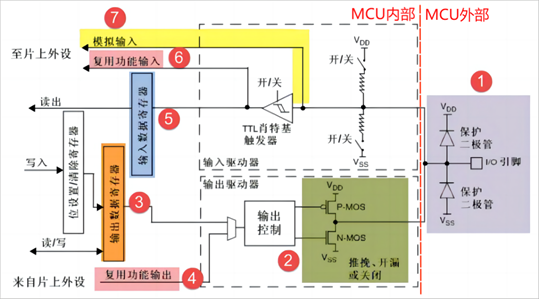
CKS32F107xx系列MCU中ADC介紹
CKS32F107xx系列MCU的GPIO內部硬件結構和工作模式
詳解CKS32F107xx系列的定時器同步功能

中科芯CKS32F107XX系列MCU的電源控制介紹




 工商網監
工商網監
評論