 SDV域控器日志追蹤與解析技術 – DLT
SDV域控器日志追蹤與解析技術 – DLT

在汽車軟件復雜度不斷攀升的今天,對不同核或分區上運行的復雜軟件進行調試或追蹤極具挑戰性,并且在POSIX系統或車輛上的復雜軟件進行分步調試往往更具挑戰。所以,如何在SDV域控制器開發測試環境中,將應用程序、中間件和內核日志與時間戳等信息同步結合匯聚到同一個日志流,以便更好服務軟件工廠或“黑燈”測試工廠,亦或為云端AI平臺提供日志調試軟件?AUTOSAR推出的組件DLT,其邏輯已從診斷日志追蹤(DiagnosticLog andTrace)演變為更加寬泛意義的開發日志追蹤(DevelopmentLog andTrace)。
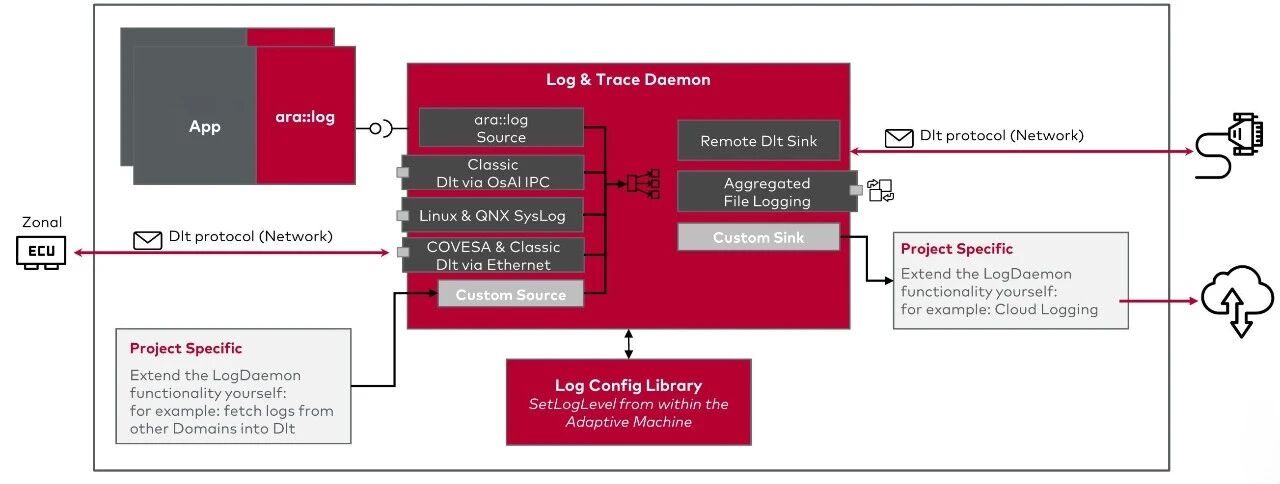
圖1 面向SDV平臺集成DLT調試日志
通常部分軟件開發工程師有配置ECU的硬件調試環境,但其它工程師幾乎沒有配置“Debug”ECU問題的環境。DLT作為ECU軟件的模塊匯聚調試日志并追蹤ECU內部問題,可以加速問題排查和解決。過往通過CANoe或CANoe Option AMD/XCP集成不同調試器或XCP獲取軟件狀態,但是面向研發環境表現出廣泛的多樣性:
不同品牌調試器和調試器擴展模塊
ECU平臺多樣性和電路連接多樣性
不同軟件配置環境的License
不同的構建設置(例如,軟件工廠、HIL Farm)
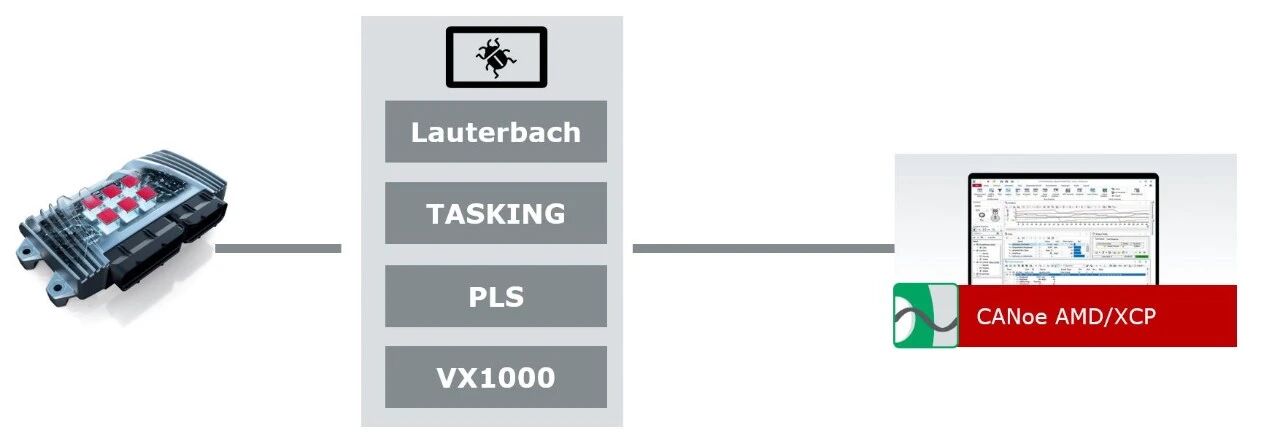
圖2 CANoe Option AMD/XCP集成不同調試器或XCP獲取日志
通過統一的DLT作為調試手段增加軟件測試的靈活性和效果,允許根據嚴重性級別(例如“致命”、“錯誤”或“信息”)對調試信息進行過濾。該過濾器可以通過外部日志工具發送的DLT控制消息在運行時進行修改。還可以直接通知應用程序新的過濾級別,以便僅針對所選的嚴重性級別生成調試信息,運行時將消息分配到另一個通信總線上,或將修改后的DLT配置存儲為NV存儲(如果硬件支持的話)。開發與測試工程師使用CANoe Option AMD/XCP在支持CCP/XCP的同時,也可直接用其實現DLT數據進行在線采集或離線分析。

圖3 CANoe Option AMD/XCP直接獲取XCP或DLT日志
Part 1
DLT應用場景和協議概述
DLT是一個AUTOSAR基礎軟件模塊。雖然DLT協議與總線無關,但建議使用高帶寬總線,如以太網。盡管如此,DLT協議并不局限于以太網的使用,使得在沒有調試器的情況下調試ECU成為可能,并允許用戶在運行時進行配置。
>
使用DLT進行常規日志記錄:
應用程序/軟件組件向DLT模塊提供日志消息
日志消息要么被過濾,要么由DLT模塊創建DLT消息(取決于日志級別)
DLT模塊將DLT消息發送到通信總線
外部客戶端接收并存儲DLT消息
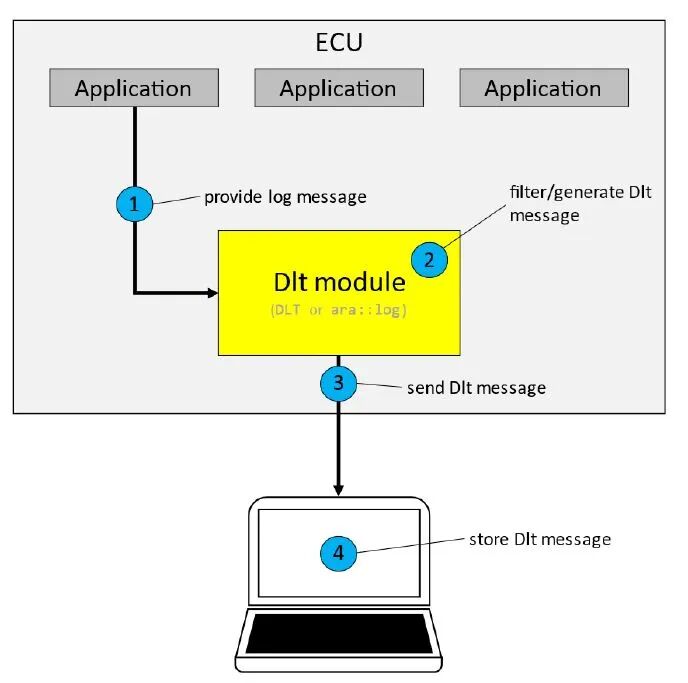
圖4 AUTOSAR DLT常規日志記錄
>
中間件VFB日志:
中間件調用DLT模塊提供的接口函數,該函數調用DLT API生成追蹤消息
DLT模塊將追蹤消息發送到DLT通信模塊接口
DLT通信模塊將追蹤消息轉發到網絡
外部客戶端接收并存儲追蹤消息
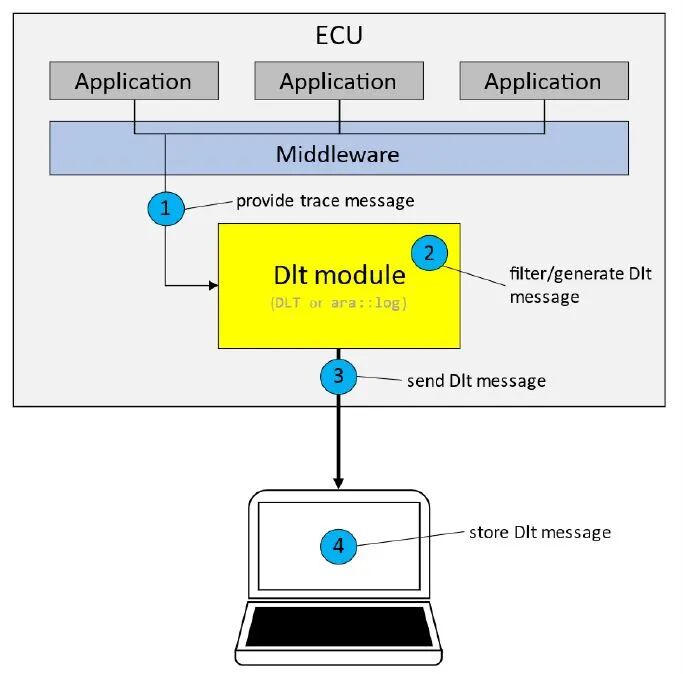
圖5 中間件通過DLT記錄日志
>
運行時配置DLT日志:
外部客戶端設置日志和追蹤級別,并將更改發送至DLT模塊
通過DLT控制消息將更改發送到DLT模塊
DLT模塊相應地調整其過濾設置的配置
DLT模塊通知應用程序新的日志級別
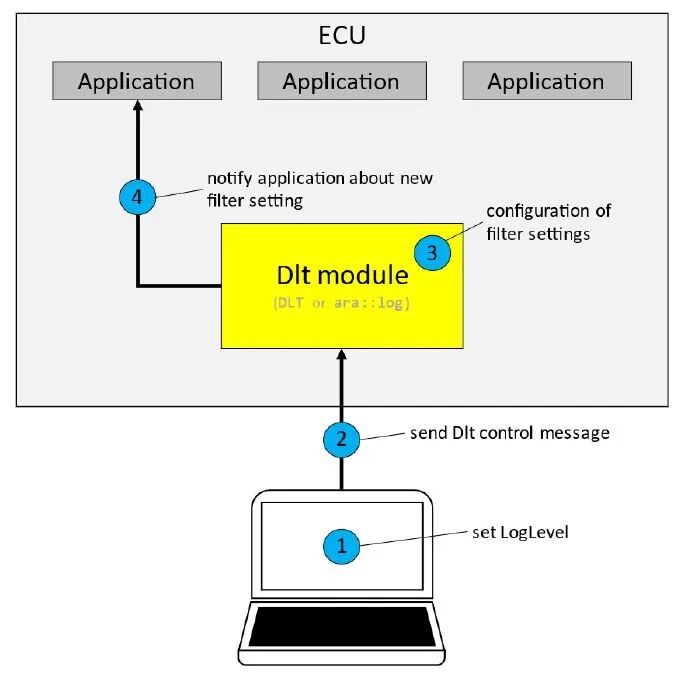
圖6 運行時配置DLT日志
>
非冗長模式(Non-verbose)傳輸日志:使用外部解析文件的方式來高效解析有效數據載荷,從而避免在通信總線上發送關于變量的元素數據,達到節省總線通信開銷的目的。外部DLT客戶端將這些元數據與接收到的參數值合并存儲。
應用程序/軟件組件向DLT模塊提供Non-verbose的日志數據
DLT模塊過濾并生成DLT消息
DLT模塊將DLT消息發送到通信總線
外部客戶端從外部文件中獲取元信息
合并的信息由外部客戶端存儲
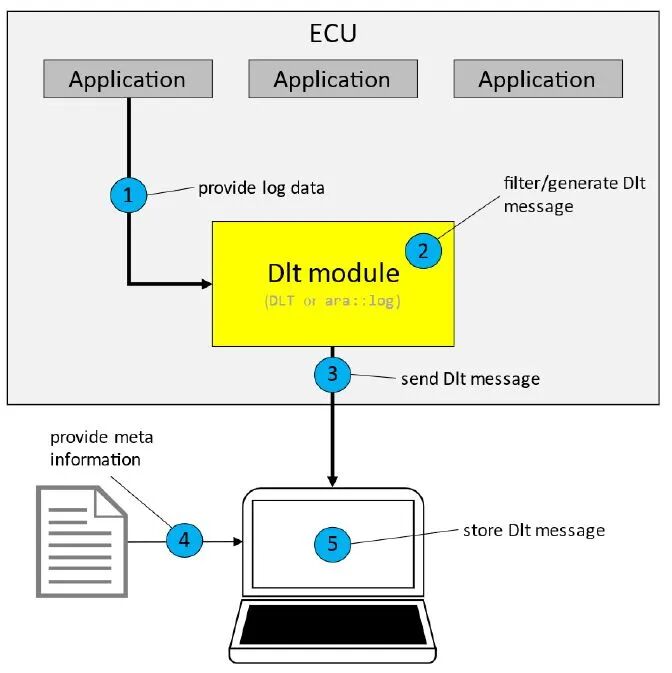
圖7 Non-verbose模式日志
DLT協議是一種高層協議,與具體使用哪種總線無關。AUTOSAR規范中的DLT協議目前定義了v1和v2兩個版本,并在Log and Trace Protocol Specification中隨AUTOSAR各個Release逐步演進和規范化,例如在AUTOSAR FO R19-11及后續R24-11(PRS)中對相關能力進行了完善和擴展。在AUTOSAR發布的早期階段(約2010年前后),Vector在ECU軟件與工具鏈中對日志與追蹤機制進行了大量工程實踐,用于開發調試和問題分析,并隨著AUTOSAR 規范的演進持續支持和實現DLT協議,最終發展到當前廣泛使用的v2版本。
DLT v1版本包頭簡單、報文開銷小,因而在帶寬受限或資源受限的ECU上能夠實現低成本部署。
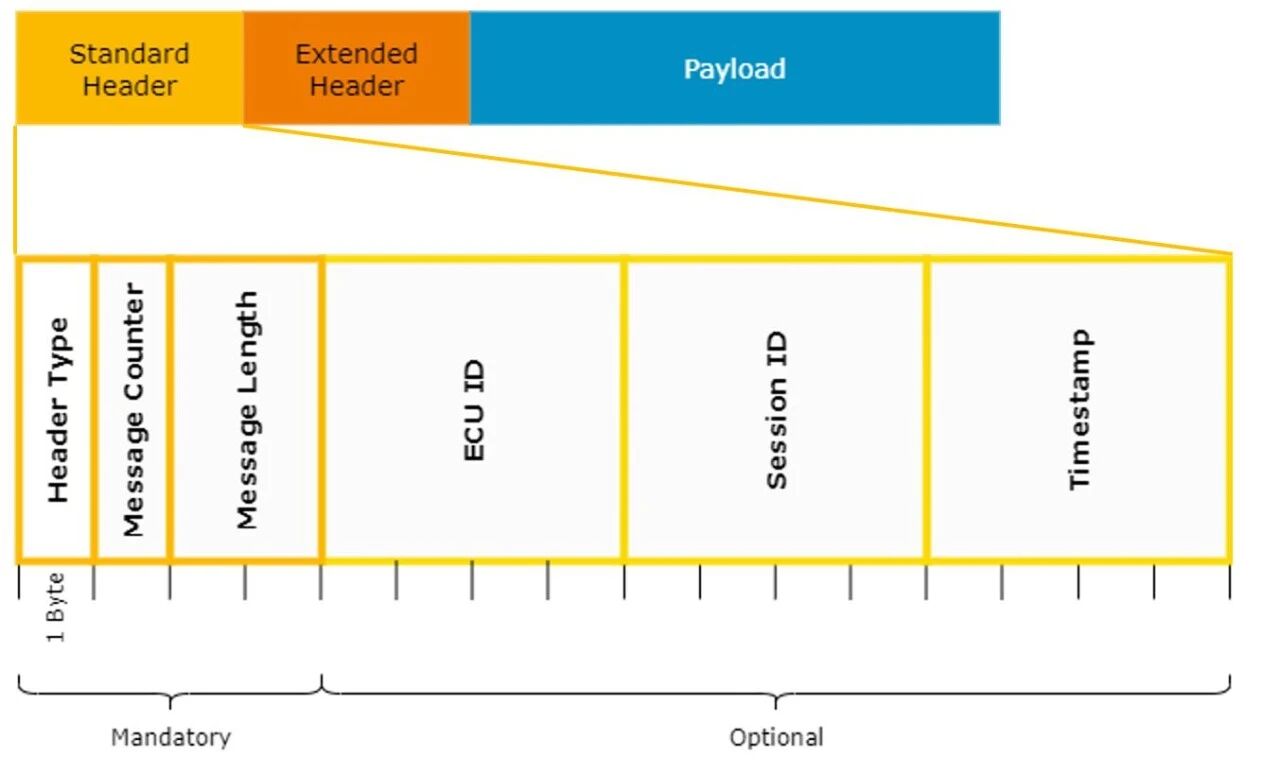
圖8 DLT v1版本標準報頭
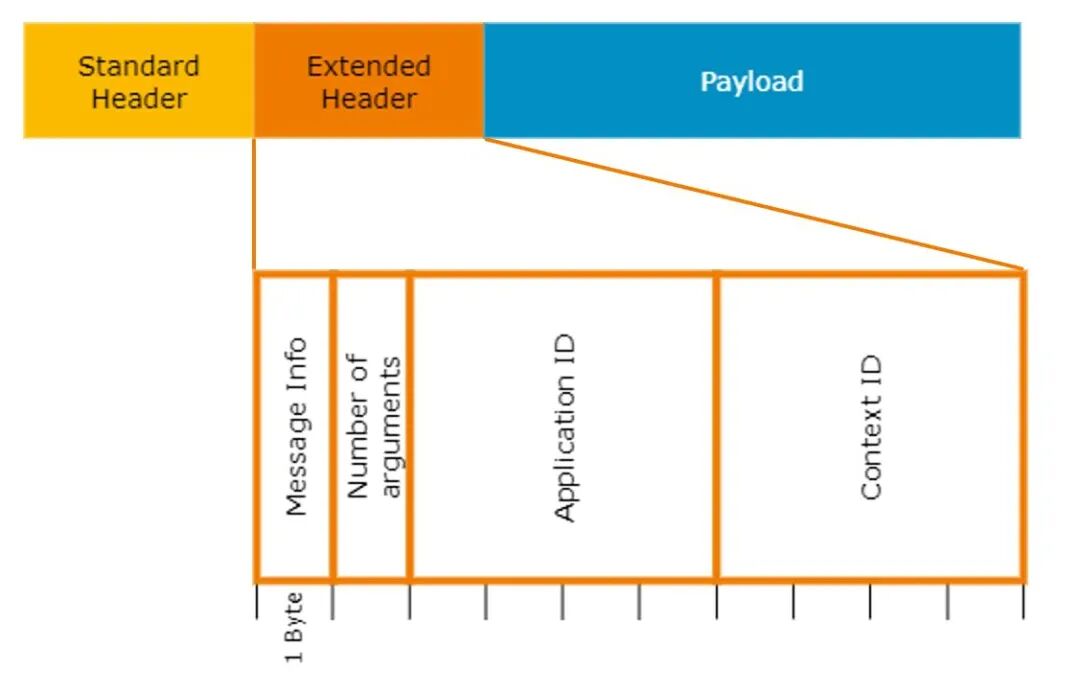
圖9 DLT v1版本擴展報頭
DLT v2支持可變長度ID(動態ID)、高精度時間戳、分段傳輸(即報文超過單幀長度可切分并重組),更適合大載荷的場景。
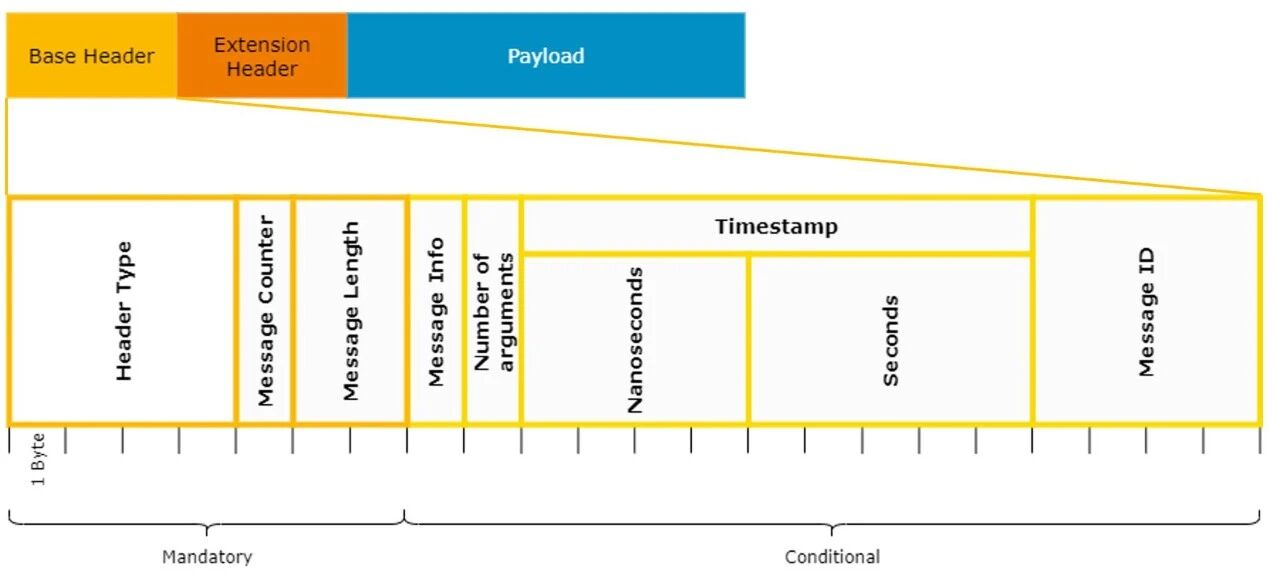
圖10 DLT v2版本標準報頭
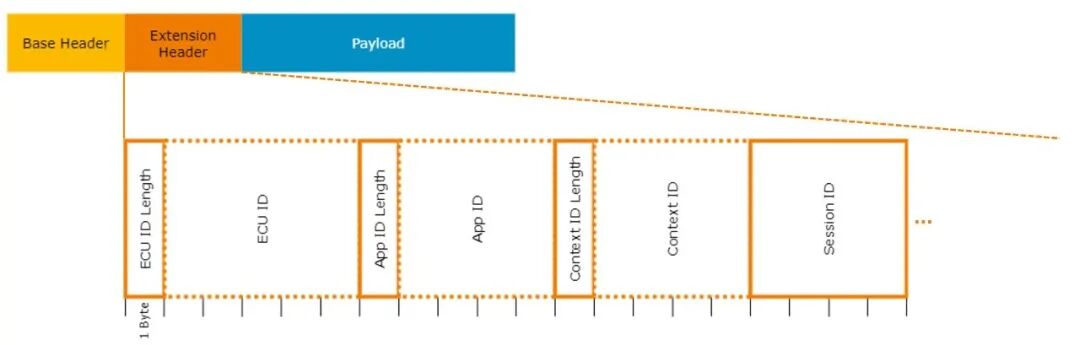
圖11 DLT v2版本擴展報頭
協議中還定義了兩種模式,分別是Verbose和Non-verbose模式,兩種模式在日志消息的嚴重性等級均提供:FATAL、ERROR、WARNING、INFO、DEBUG和VERBOSE。兩種模式的區別為:
>
Verbose模式:發送包含所有參數/文本的完整消息,便于閱讀與分析,但會消耗更多帶寬。
>
Non-verbose模式:可發送更緊湊的消息(例如僅發送參數或ID),消息結構可以通過FIBEX或ARXML數據庫文件解析,適合在帶寬受限場景降低開銷。
Part 2
日志追蹤“利器”
– 帶有DLT功能的CANoe Option AMD/XCP
通過收集日志信息來驗證ECU的正確功能,捕獲ECU的追蹤數據確保狀態流的正確變化,檢測ECU是否報告了錯誤(例如,配置錯誤或基礎軟件BSW錯誤),驗證從ECU生成的事件順序是否正確。針對如上需求,ECU需要集成對應的DLT軟件模塊:
>
基于XCP的DLT集成:現有XCP協議棧上只需將DLT API調用添加到定義事件中,配置中啟用相關功能則DET和DEM事件將自動傳輸,DEM事件支持按需過濾。
>
基于AUTOSAR的DLT集成:作為XCP DLT的替代方案,允許API更改DLT的日志級別,滿足整車廠集成DLT的功能要求。根據AUTOSAR日志定義控制日志級別(致命、錯誤、警告、調試、信息、詳細),將所有日志和追蹤聚集到集中式AUTOSAR服務組件中,基于軟件的時間信息、多核和分區日志。如AUTOSAR AP中ara::log提供每個階段的日志信息API,日志通過配置發送到特定日志接收器,若需要可通過DLT實現遠程調試。
CANoe Option AMD/XCP支持在開發與調試過程中加載A2L文件到CANoe中,并支持DaVinci工具在配置協議棧時可額外配置測量代碼,直接生成測試代碼用于CPU負載、任務執行等信息用于后續自動化驗證。
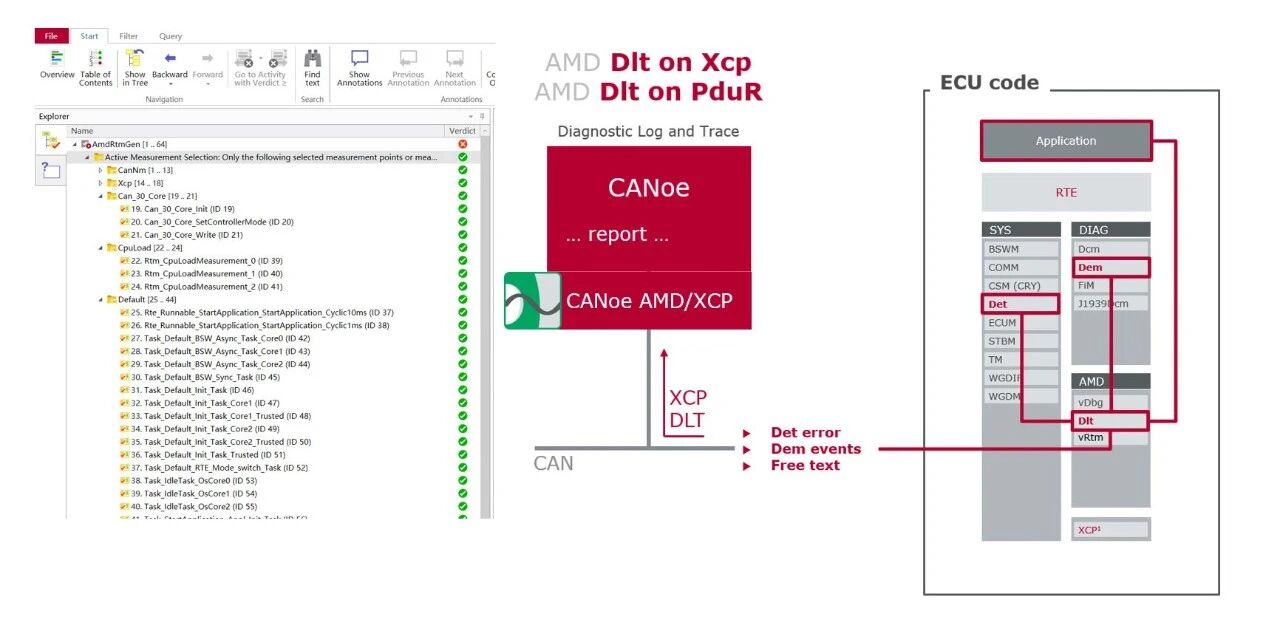
圖12 CANoe支持A2L集成用于DLT與運行測量
CANoe支持在線和離線分析DLT數據,可通過總線接口卡連接真實ECU獲取調試日志,對虛擬機如WSL中的vECU可通過集成SIL Kit來獲取調試日志。
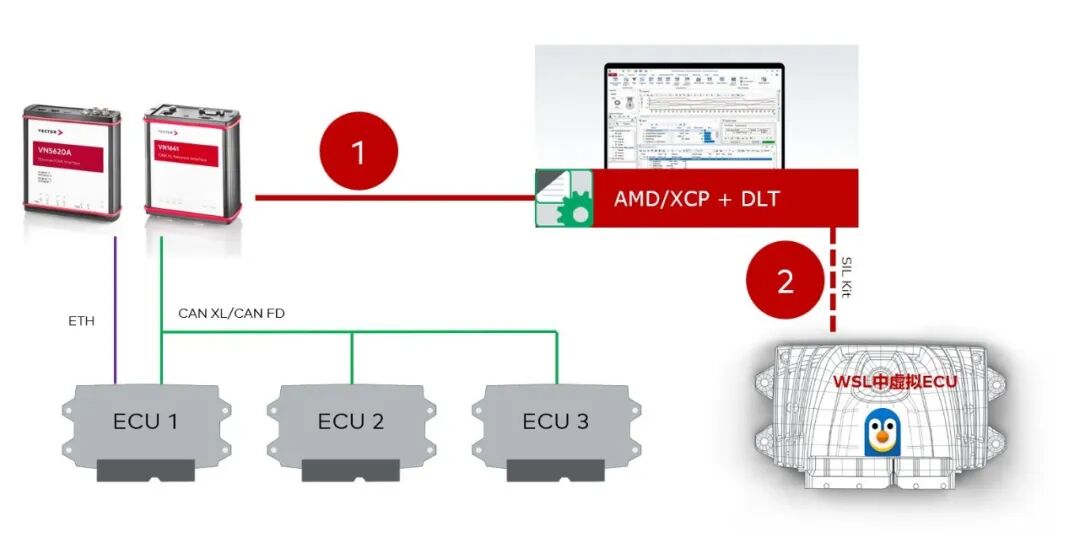
圖13 真實ECU或虛擬ECU可通過CANoe實現DLT調試日志
CANoe支持Non-verbose和Verbose兩種模式,支持一鍵生成對應FIBEX中變量到CANoe工程,也可在配置工程節點后導入對應變量。
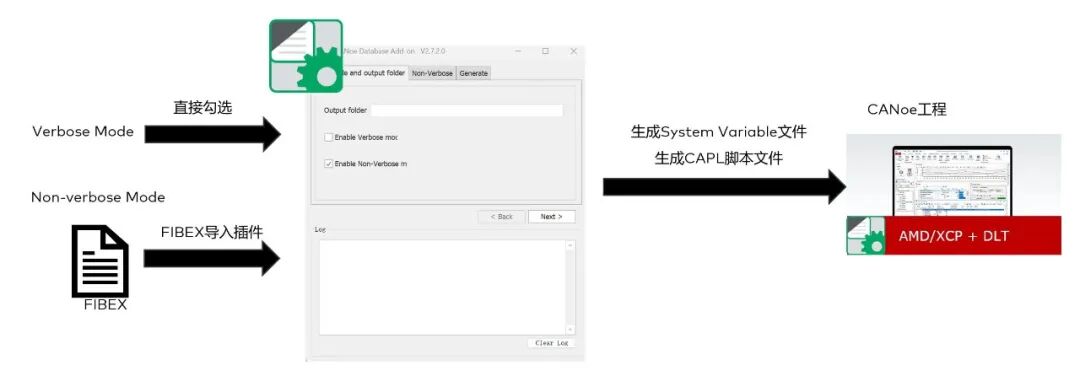
圖14 CANoe中DLT配置流程
對于Non-verbose模式消息的解析,插件根據FIBEX文件自動生成的變量,DLT變量緊隨每幀Ethernet Packet,直接被解析并顯示在Trace窗口,并可在Graphics窗口中以動態曲線方式顯示DLT日志信息。
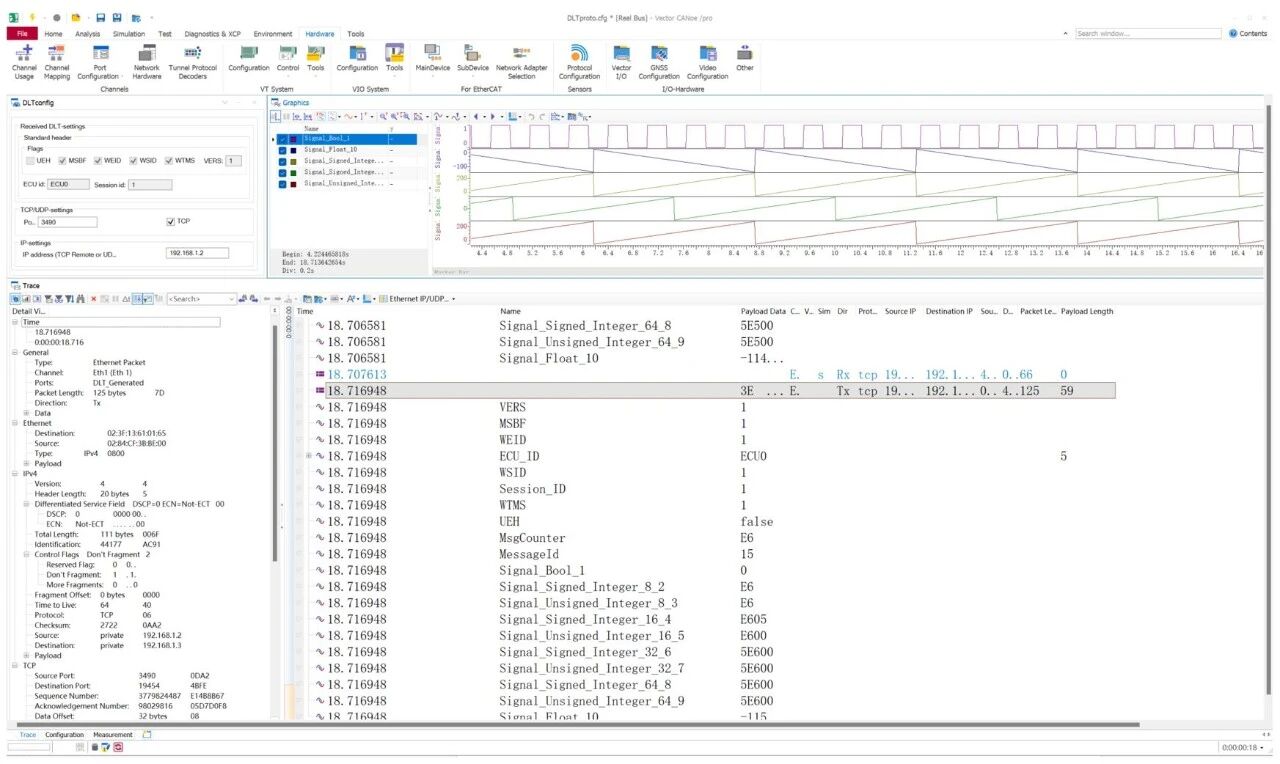
圖15 CANoe解析Non-verbose模式日志
對于Verbose模式消息的解析,具體的Payload會直接被解析成結構體,并在Trace窗口顯示。
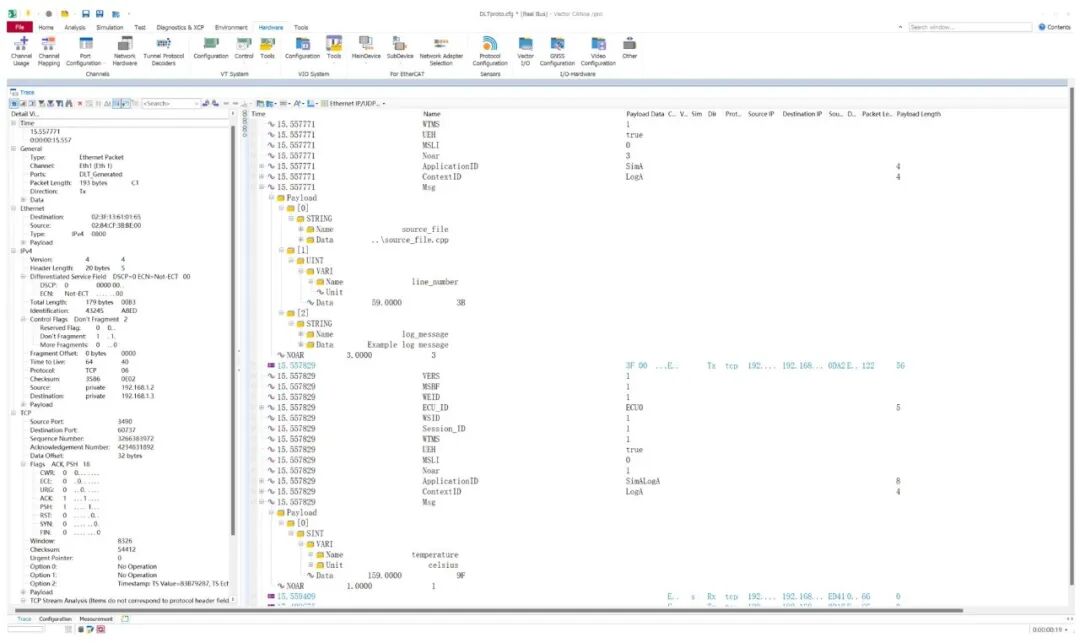
圖16 CANoe解析Verbose模式日志
同時CANoe支持發送DLT Control Message,如Set Log Level命令。
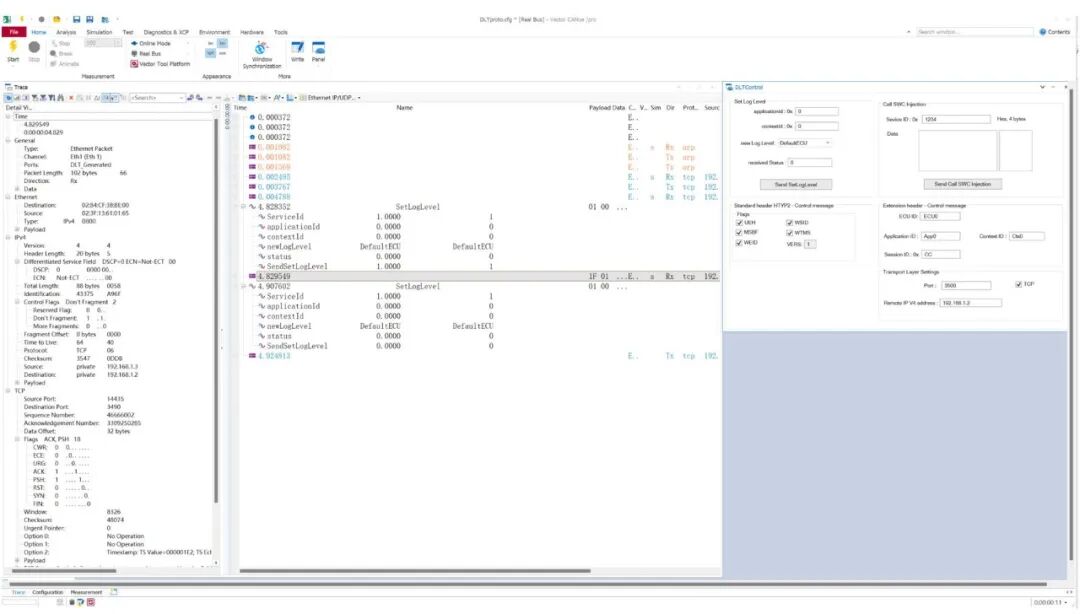
圖17 使用CANoe發送DLT Control Message
Part 3
總結和展望
SDV發展迭代必然需要更豐富的調試手段。AUTOSAR DLT作為調試器之外的另一種獲取調試日志的方式,將更好服務車輛開發各環節。CANoe Option AMD/XCP配合DLT功能提供更加全面的功能,在獲取CCP/XCP數據日志信息的同時,助力工程師更好地通過DLT分析和調試ECU。當然在車輛生產時,DLT應當關閉以滿足網絡安全需求。DLT技術也在迭代,CANoe也將更好支持“軟調試”技術,進一步提升便利性。
-
測試
+關注
關注
9文章
6201瀏覽量
131343 -
控制器
+關注
關注
114文章
17787瀏覽量
193074 -
SDV
+關注
關注
0文章
95瀏覽量
7554 -
DLT
+關注
關注
0文章
17瀏覽量
5516
發布評論請先 登錄
分布式日志追蹤ID實戰
請問SDV1.0 SDV2.0 MMC是什么區別啊!
光線追蹤技術的作用
基于機器學習的日志解析系統設計與實現
淺談東軟睿馳推出的SDV產品與解決方案
Log4Net日志存儲
Advanced Host Monitor軟件包輔助組件之日志分析器
解析Linux系統日志
Spring Boot如何實現日志鏈路追蹤

DLT Support in CANape

模組日志功能技術概覽



 工商網監
工商網監
評論