") 一文解析伺服系統(tǒng)CN1接口的DI/DO端子功能
一文解析伺服系統(tǒng)CN1接口的DI/DO端子功能

前言
本文詳細(xì)深入的介紹了伺服系統(tǒng)CN1接口的DI(數(shù)字量輸入)和DO(數(shù)字量輸出)端子功能定義、邏輯選擇原理、硬件接線規(guī)范,明確了各端子的功能分類、參數(shù)關(guān)聯(lián)及典型應(yīng)用場(chǎng)景,重點(diǎn)辨析了易混淆功能的核心差異,并強(qiáng)化了安全功能的設(shè)計(jì)邏輯。文稿適用于匯川IS620P等系列脈沖型伺服系統(tǒng),其他品牌(如松下、三菱、西門子)伺服系統(tǒng)可參考本規(guī)范,具體功能需結(jié)合對(duì)應(yīng)品牌用戶手冊(cè)調(diào)整參數(shù)。
本文可為電氣設(shè)計(jì)工程師、設(shè)備調(diào)試人員及故障排查人員提供標(biāo)準(zhǔn)化技術(shù)支持。
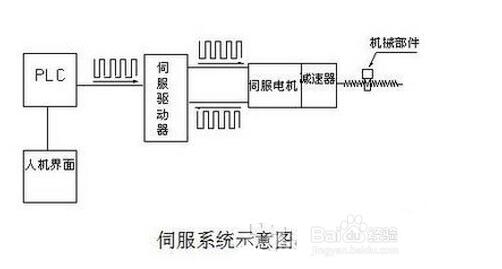
伺服系統(tǒng)DI輸入端子篇
一、數(shù)字量輸出DO端子的功能選擇
Part.1
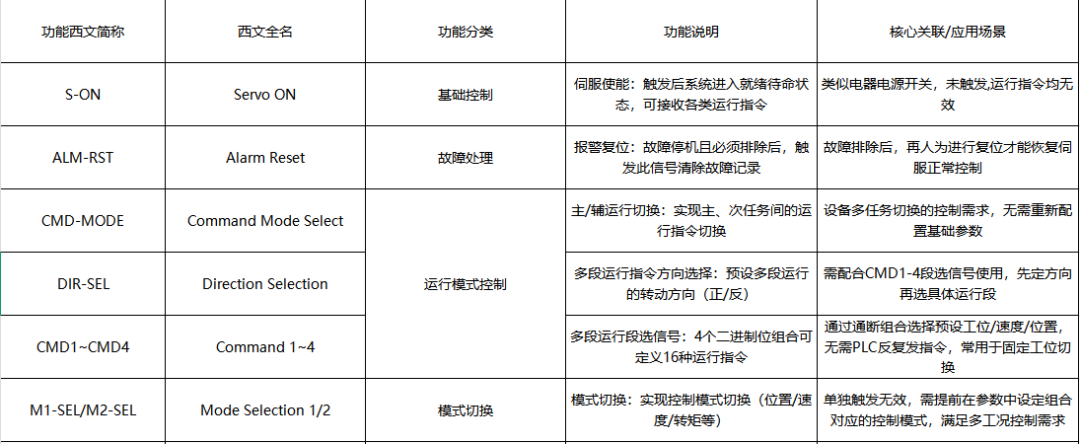
1:功能選擇
(上下滑動(dòng)即可查看全表格)
| 功能西文簡(jiǎn)稱 |
西文 全名 |
功能 分類 |
功能 說(shuō)明 |
核心關(guān)聯(lián)/應(yīng)用場(chǎng)景 |
| S-ON | Servo ON | 基礎(chǔ)控制 | 伺服使能:觸發(fā)后系統(tǒng)進(jìn)入就緒待命狀態(tài),可接收各類運(yùn)行指令 | 類似電器電源開(kāi)關(guān),未觸發(fā),運(yùn)行指令均無(wú)效 |
| ALM-RST | Alarm Reset |
故障 處理 |
報(bào)警復(fù)位:故障停機(jī)且必須排除后,觸發(fā)此信號(hào)清除故障記錄 | 故障排除后,再人為進(jìn)行復(fù)位才能恢復(fù)伺服正常控制 |
| CMD-MODE | Command Mode Select | 運(yùn)行模式控制 | 主/輔運(yùn)行切換:實(shí)現(xiàn)主、次任務(wù)間的運(yùn)行指令切換 | 設(shè)備多任務(wù)切換的控制需求,無(wú)需重新配置基礎(chǔ)參數(shù) |
| DIR-SEL | Direction Selection | 多段運(yùn)行指令方向選擇:預(yù)設(shè)多段運(yùn)行的轉(zhuǎn)動(dòng)方向(正/反) | 需配合CMD1-4段選信號(hào)使用,先定方向再選具體運(yùn)行段 | |
| CMD1~CMD4 | Command 1~4 | 多段運(yùn)行段選信號(hào):4個(gè)二進(jìn)制位組合可定義16種運(yùn)行指令 | 通過(guò)通斷組合選擇預(yù)設(shè)工位/速度/位置,無(wú)需PLC反復(fù)發(fā)指令,常用于固定工位切換 | |
| M1-SEL/M2-SEL | Mode Selection 1/2 | 模式切換 | 模式切換:實(shí)現(xiàn)控制模式切換(位置/速度/轉(zhuǎn)矩等) | 單獨(dú)觸發(fā)無(wú)效,需提前在參數(shù)中設(shè)定組合對(duì)應(yīng)的控制模式,滿足多工況控制需求 |
| POS-INH | Position Inhibit | 位置控制 | 位置指令禁止:伺服不再接收新位置指令,但已執(zhí)行指令會(huì)繼續(xù)完成 | 定位過(guò)程中臨時(shí)鎖定位置,防止新指令干擾當(dāng)前工位 |
| POS-EN | Position Enable | 多段位置指令使能:?jiǎn)⒂煤罂烧{(diào)用預(yù)設(shè)的多段位置參數(shù) | 類似電動(dòng)窗簾的預(yù)設(shè)檔位,可快速切換全開(kāi)/半開(kāi)/全關(guān)等固定工位 | |
| ZCLMP | Zero Clamp Enable | 零位固定使能:伺服通過(guò)定子的磁場(chǎng)鎖住轉(zhuǎn)子,且確認(rèn)當(dāng)前位置為零位 | 用于精準(zhǔn)定位后的位置保持,保障工位固定精度 | |
| P-OT/N-OT | Positive/Negative Over Travel | 安全保護(hù) | 正/負(fù)過(guò)沖行程保護(hù):檢測(cè)到機(jī)械極限位置時(shí)觸發(fā),防止設(shè)備超程損壞 | 相當(dāng)于機(jī)械限位的電氣保護(hù),避免機(jī)構(gòu)因超行程發(fā)生碰撞 |
| EMG | Emergency Stop | 緊急停機(jī):最高優(yōu)先級(jí)信號(hào),觸發(fā)后立即切斷電機(jī)電源,電機(jī)自由停車 | 用于突發(fā)險(xiǎn)情的緊急避險(xiǎn),避免設(shè)備和人員安全事故 | |
| VEL-LIM | Velocity Limit Source | 內(nèi)部速度限制源:觸發(fā)后按內(nèi)部預(yù)設(shè)上限限制電機(jī)最大轉(zhuǎn)速 | 忽略外部速度限制指令,保障電機(jī)在安全轉(zhuǎn)速范圍內(nèi)運(yùn)行,防止超速損壞 | |
| P-TL/N-TL | Positive/Negative Torque Limit | 正向/負(fù)向外部轉(zhuǎn)矩限制:限定對(duì)應(yīng)方向的轉(zhuǎn)矩上限 | 防止轉(zhuǎn)矩過(guò)大導(dǎo)致傳動(dòng)機(jī)構(gòu)或工件的損壞,保障設(shè)備機(jī)械或工件的結(jié)構(gòu)安全 | |
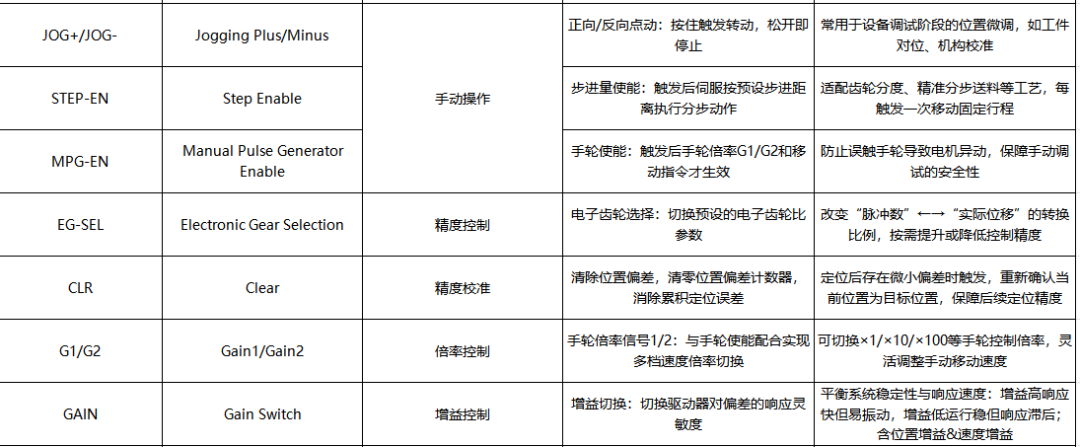
| JOG+/JOG- | Jogging Plus/Minus |
手動(dòng) 操作 |
正向/反向點(diǎn)動(dòng):按住觸發(fā)轉(zhuǎn)動(dòng),松開(kāi)即停止 | 常用于設(shè)備調(diào)試階段的位置微調(diào),如工件對(duì)位、機(jī)構(gòu)校準(zhǔn) |
| STEP-EN | Step Enable | 步進(jìn)量使能:觸發(fā)后伺服按預(yù)設(shè)步進(jìn)距離執(zhí)行分步動(dòng)作 | 適配齒輪分度、精準(zhǔn)分步送料等工藝,每觸發(fā)一次移動(dòng)固定行程 | |
| MPG-EN | Manual Pulse Generator Enable | 手輪使能:觸發(fā)后手輪倍率G1/G2和移動(dòng)指令才生效 | 防止誤觸手輪導(dǎo)致電機(jī)異動(dòng),保障手動(dòng)調(diào)試的安全性 | |
| EG-SEL | Electronic Gear Selection | 精度控制 | 電子齒輪選擇:切換預(yù)設(shè)的電子齒輪比參數(shù) | 改變“脈沖數(shù)”←→“實(shí)際位移”的轉(zhuǎn)換比例,按需提升或降低控制精度 |
| CLR | Clear | 精度校準(zhǔn) | 清除位置偏差,清零位置偏差計(jì)數(shù)器,消除累積定位誤差 | 定位后存在微小偏差時(shí)觸發(fā),重新確認(rèn)當(dāng)前位置為目標(biāo)位置,保障后續(xù)定位精度 |
| G1/G2 |
Gain1/ Gain2 |
倍率 控制 |
手輪倍率信號(hào)1/2:與手輪使能配合實(shí)現(xiàn)多檔速度倍率切換 | 可切換×1/×10/×100等手輪控制倍率,靈活調(diào)整手動(dòng)移動(dòng)速度 |
| GAIN | Gain Switch | 增益控制 | 增益切換:切換驅(qū)動(dòng)器對(duì)偏差的響應(yīng)靈敏度 | 平衡系統(tǒng)穩(wěn)定性與響應(yīng)速度:增益高響應(yīng)快但易振動(dòng),增益低運(yùn)行穩(wěn)但響應(yīng)滯后;含位置增益&速度增益 |
| TRQ-DIR | Torque Direction | 指令方向控制 | 轉(zhuǎn)矩指令方向設(shè)定:在轉(zhuǎn)矩模式下定義轉(zhuǎn)矩輸出方向 | 適配壓合、擰緊等工藝,如正轉(zhuǎn)夾緊、反轉(zhuǎn)松開(kāi)的轉(zhuǎn)矩方向控制 |
| SPD-DIR | Speed Direction | 速度指令方向設(shè)定:在速度模式下定義電機(jī)轉(zhuǎn)動(dòng)方向 | 單獨(dú)設(shè)定速度控制的轉(zhuǎn)向,滿足單向調(diào)速的工藝需求 | |
| POS-DIR | Position Direction | 位置指令方向設(shè)定:在位置模式下定義趨近目標(biāo)位置方向 | 保障定位動(dòng)作按預(yù)設(shè)路徑執(zhí)行,避免反向走位影響精度 | |
| INT-CLR | Interruption Clear |
中斷 控制 |
解除中斷定長(zhǎng):中斷任務(wù)在進(jìn)行,執(zhí)行退出中斷模式,繼續(xù)完成剩余行程 | 定長(zhǎng)加工中臨時(shí)中斷(如工件檢查、突發(fā)暫停)后,需“斷點(diǎn)續(xù)傳”完成剩余加工 |
| INT-INH | Interruption Inhibit | 禁止中斷定長(zhǎng):中斷任務(wù)未產(chǎn)生,阻止中斷功能生效,屏蔽中斷事件 | 高精度連續(xù)加工(如長(zhǎng)行程磨削、齒輪分度),需避免非必要中斷干擾流程 | |
| ORG-SW | Origin Switch | 高級(jí)功能 | 原點(diǎn)開(kāi)關(guān);檢測(cè)機(jī)械原點(diǎn)位置的傳感器信號(hào) | 為回零動(dòng)作提供位置基準(zhǔn),保障原點(diǎn)定位的準(zhǔn)確性;ORG-SW& ORG-EN配合使用 |
| ORG-EN | Origin Return Enable | 原點(diǎn)復(fù)歸使能:觸發(fā)后啟動(dòng)自動(dòng)回原點(diǎn)功能 | 實(shí)現(xiàn)設(shè)備開(kāi)機(jī)或工位重置后的原點(diǎn)校準(zhǔn),保障后續(xù)定位基準(zhǔn)統(tǒng)一 | |
| PUL-INH | Pulse Inhibit |
指令 屏蔽 |
脈沖指令禁止:直接阻斷脈沖信號(hào)接收,電機(jī)停止響應(yīng)位置/速度控制 | 比POS-INH更直接,快速屏蔽所有脈沖類控制指令(如緊急情況下的指令切斷) |
由于表格內(nèi)容實(shí)比較豐富也給大家截圖方便觀看,點(diǎn)擊圖片即可放大)


注:西文簡(jiǎn)稱可以作為伺服接線的線碼管的標(biāo)識(shí)信息
安全端子使用要點(diǎn):
急停(EMG)需采用雙回路NC接線方式,通過(guò)硬線直接切斷電機(jī)動(dòng)力電源(驅(qū)動(dòng)器控制電源需保持通電,以維持狀態(tài)監(jiān)控),禁止僅通過(guò)軟件邏輯處理急停功能;
限位(P-OT/N-OT)端子邏輯選擇優(yōu)先設(shè)為高電平有效,線路斷線(迎合《熵增定律》)時(shí)可自動(dòng)觸發(fā)保護(hù),避免設(shè)備因信號(hào)丟失導(dǎo)致超程;
接線時(shí)需統(tǒng)一信號(hào)的類型,共陰/共陽(yáng)不可混接(PNP信號(hào)對(duì)應(yīng)共陰接線,NPN信號(hào)對(duì)應(yīng)共陽(yáng)接線),否則可能導(dǎo)致DI輸入端子對(duì)應(yīng)的光耦無(wú)法激發(fā),進(jìn)而端子功能入死局。
易混淆DI功能對(duì)照表
|
易混 淆功能 |
核心區(qū)別 | 適用場(chǎng)景 |
|
GAIN 增益切換 |
切換位置/速度環(huán)增益參數(shù)組,優(yōu)化系統(tǒng)響應(yīng)速度與穩(wěn)定性 | 自動(dòng)運(yùn)行時(shí)不同工況切換(如高速定位/重載平穩(wěn)運(yùn)行) |
|
G1/G2 手輪倍率 |
切換手輪控制速度倍率(×1/×10/×100等),僅影響手動(dòng)操作速度 | 手動(dòng)調(diào)試時(shí)調(diào)整移動(dòng)速度(精細(xì)對(duì)位/快速移動(dòng)) |
|
POS-INH 位置指令禁止 |
不接收新位置指令,但之前的指令會(huì)繼續(xù)直至完成 | 定位過(guò)程中臨時(shí)鎖定工位(如工件檢測(cè)) |
|
PUL-INH 脈沖指令禁止 |
直接阻斷脈沖信號(hào):電機(jī)立即停止響應(yīng)所有位置/速度指令 | 緊急情況下快速屏蔽所有脈沖類控制指令 |
|
INT-CLR 解除中斷 |
中斷發(fā)生后觸發(fā),恢復(fù)原任務(wù)并完成剩余行程 | 臨時(shí)中斷(如工件檢查)后需“斷點(diǎn)續(xù)傳”,避免運(yùn)行又從頭開(kāi)始 |
|
INT-INH 阻止中斷 |
中斷未發(fā)生前觸發(fā),屏蔽所有中斷事件 | 中斷還沒(méi)發(fā)生→提前開(kāi)INT-INH的‘防護(hù)盾’→任何中斷信號(hào)都進(jìn)不來(lái),保證任務(wù)從頭到尾連續(xù)干 |
(二)邏輯選擇
Part.2
DI 數(shù)字量輸入端子的邏輯選擇包含 5 種類型:0 = 低電平有效、1 = 高電平有效、2 = 上升沿有效、3 = 下降沿有效、4 = 上升沿 + 下降沿有效。本文重點(diǎn)討論工業(yè)場(chǎng)景中最常用的低電平有效與高電平有效。
(OC:Optocoupler,光耦,以下簡(jiǎn)稱 OC)。
驅(qū)動(dòng)器上電后,依賴內(nèi)部軟硬件協(xié)同作用實(shí)現(xiàn)相關(guān)的端子邏輯,見(jiàn)示意圖DI-01
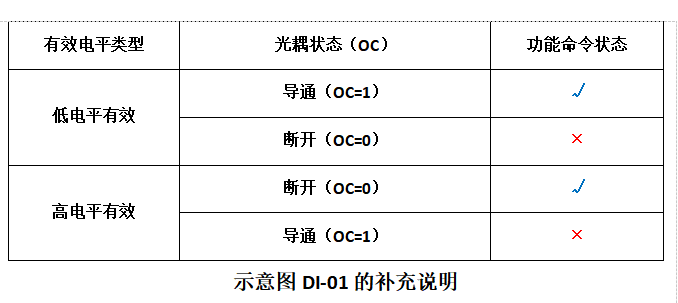
一、0 = 低電平有效:當(dāng)Hardware的 DI1 端子關(guān)聯(lián)的光耦 OC=1(導(dǎo)通狀態(tài))時(shí),該端子定義的功能命令生效;OC=0(斷開(kāi)狀態(tài))時(shí),功能命令無(wú)效。
示意圖DI-01左側(cè):端子邏輯選擇是低電平有效, DI1的OC=0,正向限位P-OT沒(méi)有激發(fā),正向限位信號(hào)為假(False)未觸發(fā)保護(hù);OC=1,正向限位P-OT被激發(fā),正向限位信號(hào)為真(True),觸發(fā)保護(hù)。
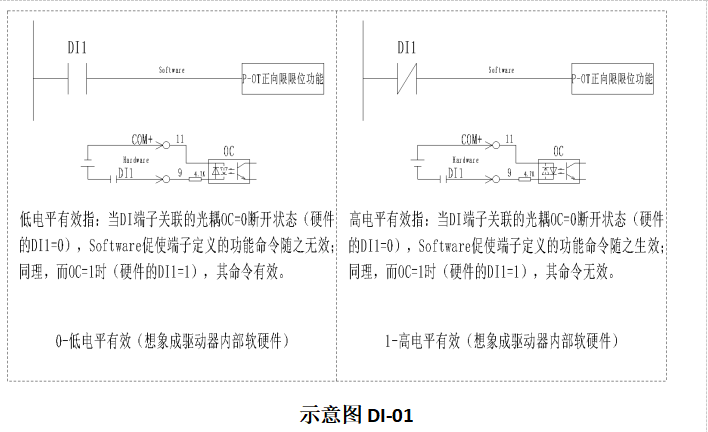
二、高電平有效:當(dāng)DI1 端子關(guān)聯(lián)的光耦 OC=0(斷開(kāi)狀態(tài))時(shí),功能命令生效;OC=1(導(dǎo)通狀態(tài))時(shí),功能命令無(wú)效。
示意圖DI-01補(bǔ)充:端子邏輯選擇是高電平有效, DI1的OC=0,正向限位P-OT已被激發(fā),正向限位信號(hào)為假(True)觸發(fā)保護(hù);OC=1,正向限位P-OT被激發(fā),正向限位信號(hào)為真(False),未觸發(fā)保護(hù)。
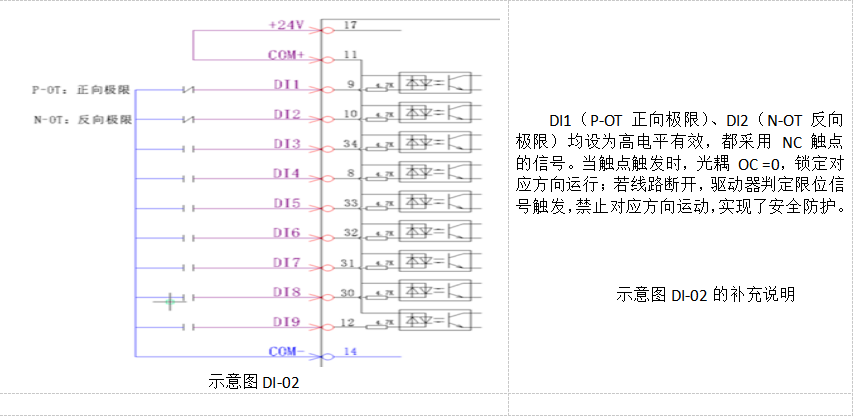
三、 為了增強(qiáng)對(duì)高電平輸入有效概念的理解,再圖示說(shuō)明:示意圖DI-02,DI1 DI2正負(fù)限位的端子邏輯均被定義高電平輸入有效。
P-OT=0時(shí)(NC信號(hào)未激發(fā),OC=1),此時(shí)示意圖DI-01右的Software的DI1的NC位取反為開(kāi)路狀態(tài),導(dǎo)致“P-OT正向限位功能”=0,正向運(yùn)行依然可以繼續(xù),當(dāng)正向限位開(kāi)關(guān)被激發(fā)(NC觸點(diǎn)),此時(shí)示意圖DI-02的DI1的OC=0了,示意圖DI-01補(bǔ)充圖的導(dǎo)致“P-OT正向限位功能”=1了,再不能朝正方向運(yùn)行了,觸發(fā)了正向運(yùn)行的保護(hù)。另,由于種種原因?qū)е铝薉I1信號(hào)線路的斷開(kāi),驅(qū)動(dòng)器立即判斷成正向限位信號(hào)被觸發(fā)了,正向運(yùn)行不能進(jìn)行,這樣,安全事故就被提前遏制(N-OT反向極限雷同)。
注:高電平有效適用于急停、限位等安全功能,其核心優(yōu)勢(shì)在于:當(dāng)線路斷開(kāi)時(shí)(OC=0),功能命令生效(禁止相關(guān)運(yùn)動(dòng)),從而把安全事故遏制在萌芽狀態(tài)。
(三)與上位機(jī)硬件接線及有效電平
Part.3
DI 端子與上位機(jī)的接線需匹配上位機(jī)輸類型(NPN/PNP),確保有效電平邏輯一致,具體接線方式如下:
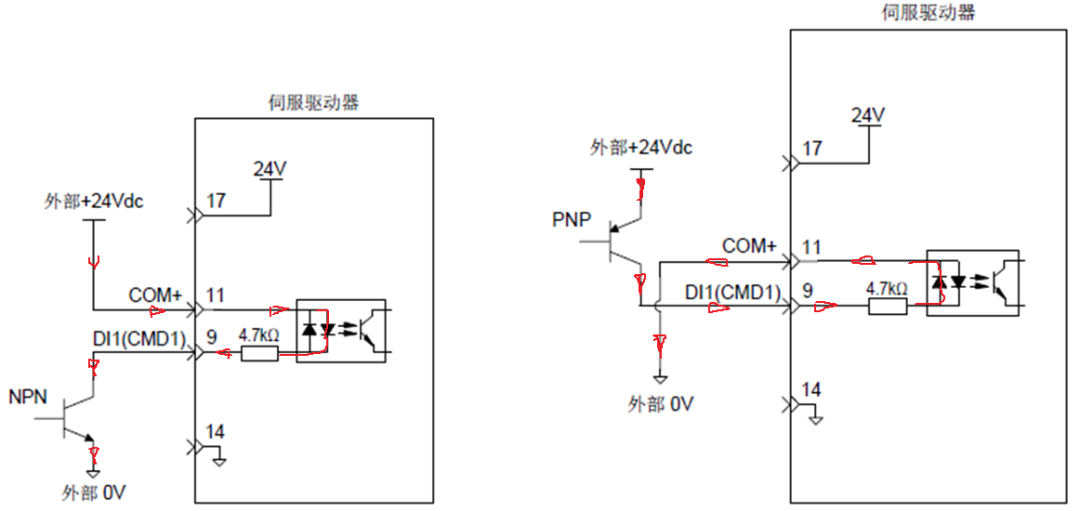
左:低電平輸入有效 右:高電平輸入有效
示意圖DI - 03:DI 端子與上位機(jī)硬件接線圖(參考點(diǎn):0V,檢驗(yàn)點(diǎn):DI1 9#端子)
1:示意圖DI-03左側(cè)電路是與NPN輸出的上位機(jī)的硬件接線,COM+11#端子連接電源的+24VDC,電流的流向順序:
+24VDC→COM+ 11#端子→OC的右側(cè)二極管→4.7KΩ→DI1 9#端子→NPN晶體管→0V
如果此時(shí)上位機(jī)NPN=0截止?fàn)顟B(tài),9#端子電位是+24VDC,CMD(命令)=0,如果NPN=1導(dǎo)通,9#端子電位是0VDC,針對(duì)硬件OC,謂之低電平輸入有效。
2:示意圖DI-03右側(cè)電路是與PNP輸出的上位機(jī)的硬件接線,COM+11#端子連接電源的0VDC,電流的流向順序:
+24VDC→PNP晶體管→DI1 9#端子→4.7KΩ→OC的左側(cè)二極管→COM+ 11#端子→0V
如果此時(shí)上位機(jī)PNP=0截止?fàn)顟B(tài),9#端子電位是0VDC,CMD(命令)=0,如果PNP=1導(dǎo)通,9#端子電位是+24VDC,針對(duì)硬件OC,謂之高電平輸入有效。
注:硬件層面的 “高低電平有效” 是指端子電位狀態(tài)(0VDC/+24VDC),與端子邏輯選擇中的 “高低電平有效” 是 “硬件實(shí)現(xiàn)” 與 “功能定義” 的關(guān)系,極其容易混淆,務(wù)必特別留心區(qū)分。
伺服系統(tǒng)DO輸出端子篇
一、 數(shù)字量輸出DO端子的功能選擇
Part.1
(一)功能定義
(上下滑動(dòng)即可查看全表格)
|
西文 簡(jiǎn)稱 |
西文 全名 |
功能 分類 |
功能 說(shuō)明 |
應(yīng)用 場(chǎng)景 |
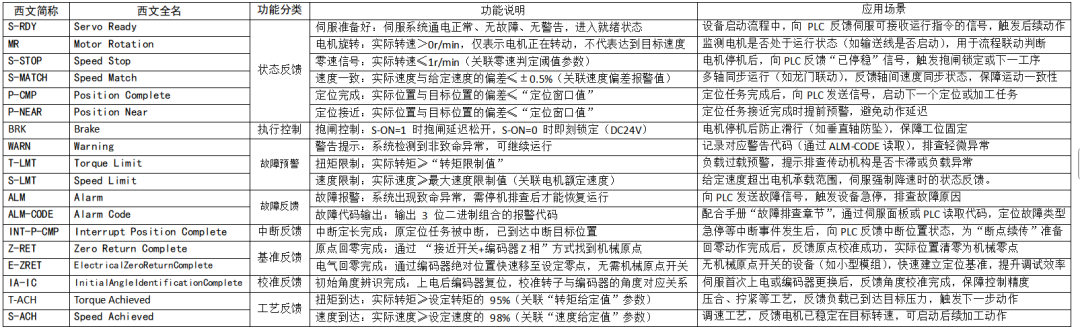
| S-RDY | Servo Ready | 狀態(tài)反饋 | 伺服準(zhǔn)備好:伺服系統(tǒng)通電正常、無(wú)故障、無(wú)警告,進(jìn)入就緒狀態(tài) | 設(shè)備啟動(dòng)流程中,向PLC反饋伺服可接收運(yùn)行指令的信號(hào),觸發(fā)后續(xù)動(dòng)作 |
| MR | Motor Rotation | 電機(jī)旋轉(zhuǎn):實(shí)際轉(zhuǎn)速>0r/min,僅表示電機(jī)正在轉(zhuǎn)動(dòng),不代表達(dá)到目標(biāo)速度 | 監(jiān)測(cè)電機(jī)是否處于運(yùn)行狀態(tài)(如輸送線是否啟動(dòng)),用于流程聯(lián)動(dòng)判斷 | |
| S-STOP | Speed Stop | 零速信號(hào):實(shí)際轉(zhuǎn)速≤1r/min(關(guān)聯(lián)零速判定閾值參數(shù)) | 電機(jī)停機(jī)后,向PLC反饋“已停穩(wěn)”信號(hào),觸發(fā)抱閘鎖定或下一工序 | |
| S-MATCH | Speed Match | 速度一致:實(shí)際速度與給定速度的偏差≤±0.5%(關(guān)聯(lián)速度偏差報(bào)警值) | 多軸同步運(yùn)行(如龍門聯(lián)動(dòng)),反饋軸間速度同步狀態(tài),保障運(yùn)動(dòng)一致性 | |
| P-CMP | Position Complete | 定位完成:實(shí)際位置與目標(biāo)位置的偏差≤“定位窗口值” | 定位任務(wù)完成后,向PLC發(fā)送信號(hào),啟動(dòng)下一個(gè)定位或加工任務(wù) | |
| P-NEAR | Position Near | 定位接近:實(shí)際位置與目標(biāo)位置的偏差≤“定位窗口值” | 定位任務(wù)接近完成時(shí)提前預(yù)警,避免動(dòng)作延遲 | |
| BRK | Brake | 執(zhí)行控制 | 抱閘控制:S-ON=1時(shí)抱閘延遲松開(kāi),S-ON=0時(shí)即刻鎖定(DC24V) | 電機(jī)停機(jī)后防止滑行(如垂直軸防墜),保障工位固定 |
| WARN | Warning | 故障預(yù)警 | 警告提示:系統(tǒng)檢測(cè)到非致命異常,可繼續(xù)運(yùn)行 | 記錄對(duì)應(yīng)警告代碼(通過(guò)ALM-CODE讀取),排查輕微異常 |
| T-LMT | Torque Limit | 扭矩限制:實(shí)際轉(zhuǎn)矩≥“轉(zhuǎn)矩限制值” | 負(fù)載過(guò)載預(yù)警,提示排查傳動(dòng)機(jī)構(gòu)是否卡滯或負(fù)載異常 | |
| S-LMT | Speed Limit | 速度限制:實(shí)際速度≥最大速度限制值(關(guān)聯(lián)電機(jī)額定速度) | 給定速度超出電機(jī)承載范圍,伺服強(qiáng)制降速時(shí)的狀態(tài)反饋。 | |
| ALM | Alarm | 故障反饋 | 故障報(bào)警:系統(tǒng)出現(xiàn)致命異常,需停機(jī)排查后才能恢復(fù)運(yùn)行 | 向PLC發(fā)送故障信號(hào),觸發(fā)設(shè)備急停,排查故障原因 |
| ALM-CODE | Alarm Code | 故障代碼輸出:輸出3位二進(jìn)制組合的報(bào)警代碼 | 配合手冊(cè)“故障排查章節(jié)”,通過(guò)伺服面板或PLC讀取代碼,定位故障類型 | |
| INT-P-CMP | Interrupt Position Complete | 中斷反饋 | 中斷定長(zhǎng)完成:原定位任務(wù)被中斷,已到達(dá)中斷目標(biāo)位置 | 急停等中斷事件發(fā)生后,向PLC反饋中斷位置狀態(tài),為“斷點(diǎn)續(xù)傳”準(zhǔn)備 |
| Z-RET | Zero Return Complete | 基準(zhǔn)反饋 | 原點(diǎn)回零完成:通過(guò) “接近開(kāi)關(guān)+編碼器Z相”方式找到機(jī)械原點(diǎn) | 回零動(dòng)作完成后,反饋原點(diǎn)校準(zhǔn)成功,實(shí)際位置清零為機(jī)械零點(diǎn) |
| E-ZRET | ElectricalZeroReturnComplete | 電氣回零完成:通過(guò)編碼器絕對(duì)位置快速移至設(shè)定零點(diǎn),無(wú)需機(jī)械原點(diǎn)開(kāi)關(guān) | 無(wú)機(jī)械原點(diǎn)開(kāi)關(guān)的設(shè)備(如小型模組),快速建立定位基準(zhǔn),提升調(diào)試效率 | |
| IA-IC | InitialAngleIdentificationComplete | 校準(zhǔn)反饋 | 初始角度辨識(shí)完成:上電后編碼器復(fù)位,校準(zhǔn)轉(zhuǎn)子與編碼器的角度對(duì)應(yīng)關(guān)系 | 伺服首次上電或編碼器更換后,反饋角度校準(zhǔn)完成,保障控制精度 |
| T-ACH | Torque Achieved | 工藝反饋 | 扭矩到達(dá):實(shí)際轉(zhuǎn)矩≥設(shè)定轉(zhuǎn)矩的95%(關(guān)聯(lián)“轉(zhuǎn)矩給定值”參數(shù)) | 壓合、擰緊等工藝,反饋負(fù)載已到達(dá)目標(biāo)壓力,觸發(fā)下一步動(dòng)作 |
| S-ACH | Speed Achieved | 速度到達(dá):實(shí)際速度≥設(shè)定速度的98%(關(guān)聯(lián)“速度給定值”參數(shù)) | 調(diào)速工藝,反饋電機(jī)已穩(wěn)定在目標(biāo)轉(zhuǎn)速,可啟動(dòng)后續(xù)加工動(dòng)作 |
由于表格內(nèi)容實(shí)比較豐富也給大家截圖方便觀看,點(diǎn)擊圖片即可放大)
(二)邏輯輸出選擇
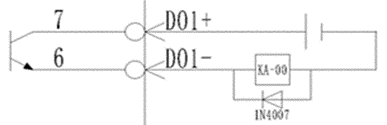
輸出端子邏輯選擇(參考所附示意圖DO-01)
情況1:選擇 “0-有效時(shí)輸出L低電平(光耦導(dǎo)通)”
當(dāng)DO定義的功能“為真”(如,伺服準(zhǔn)備好)時(shí):光耦導(dǎo)通→DO1端子的“DO1+”和“DO1-”之間相當(dāng)于“短路”,萬(wàn)用表測(cè)量對(duì)應(yīng)的端子6#7#,電壓約為0VDC。
情況2:選擇“1-有效時(shí)輸出H高電平(光耦關(guān)斷)”
當(dāng)DO1定義的功能“為真”(如,伺服準(zhǔn)備好)時(shí):光耦關(guān)斷→DO1端子的“DO1+”和“DO1-”之間相當(dāng)于“開(kāi)路”→萬(wàn)用表檢測(cè)到對(duì)應(yīng)的端子6#7#高電平信號(hào)
(因?yàn)閮啥藳](méi)導(dǎo)通,電壓差是外部電源的電壓)。
注:西文簡(jiǎn)稱可以作為伺服接線的線碼管的標(biāo)識(shí)信息
示意圖DO-01
參考文獻(xiàn):
匯川技術(shù)IS620P系列伺服驅(qū)動(dòng)器用戶手冊(cè)
GB/T 19939-2005,伺服系統(tǒng)通用技術(shù)條件 .
作者:黎贏璧。
-
接口
+關(guān)注
關(guān)注
33文章
9542瀏覽量
157188 -
西門子
+關(guān)注
關(guān)注
98文章
3329瀏覽量
120481 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
608瀏覽量
41840
原文標(biāo)題:【建議收藏】一文吃透伺服 DI/DO 端子:從功能分類、邏輯選擇與硬件接線全景解析
文章出處:【微信號(hào):gkongbbs,微信公眾號(hào):工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
三菱交流伺服系統(tǒng)伺服故障和報(bào)警代碼
關(guān)于NI-9401板卡與伺服驅(qū)動(dòng)器CN1端口的接線問(wèn)題
數(shù)控機(jī)床的伺服系統(tǒng)
進(jìn)給伺服系統(tǒng)
伺服系統(tǒng)介紹

伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
伺服系統(tǒng)什么意思_伺服系統(tǒng)的作用是什么
伺服系統(tǒng)應(yīng)用于哪兒_伺服系統(tǒng)應(yīng)用實(shí)例
一文知道伺服系統(tǒng)設(shè)計(jì)步驟及方法
一文讀懂?dāng)?shù)控伺服系統(tǒng)的作用
交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合
伺服系統(tǒng)原理及分類

伺服系統(tǒng)工作原理解析 伺服系統(tǒng)在自動(dòng)化中的應(yīng)用
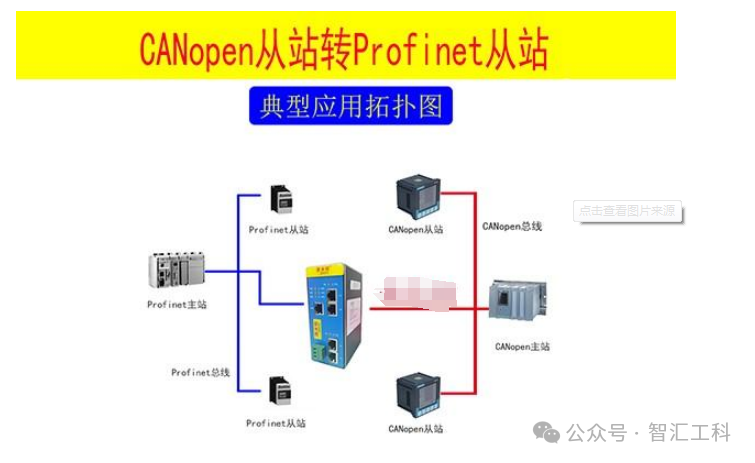
CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論