 VLA和世界模型在自動駕駛中可以融合嗎?
VLA和世界模型在自動駕駛中可以融合嗎?

[首發于智駕最前沿微信公眾號]隨著VLA(視覺-語言-動作模型)與世界模型在自動駕駛領域的關注度日益提升,這兩項技術已成為眾多主機廠研發布局的重點方向。前者強調將感知、語義推理與動作生成整合到同一個大模型中,以實現端到端的決策輸出;后者則致力于在系統內部構建對物理環境的動態模擬與未來狀態推演,以提升對復雜場景的預見與應對能力。那么,這兩項技術是否可以深度融合,從而讓自動駕駛系統實現更智能、更可靠的駕駛行為呢?

什么是VLA和世界模型
在自動駕駛中,VLA(Vision-Language-Action)是一種端到端的方法,其核心在于將“感知”“理解”與“執行”整合進同一個大模型中統一處理。VLA系統通過攝像頭等傳感器獲取路面視覺信息,并將其轉化為高維特征。這些特征隨后被輸入到經過擴展的大型視覺-語言模型(這類模型原本是為了文本和圖像理解設計的)中,從而在模型內部完成語義推理,其不僅能識別車道線、行人、交通標志等要素,還能進一步分析行人意圖、交通規則優先級等復雜情境。模型的輸出被直接映射為如轉向、加速或制動等具體的控制指令。
VLA的特點在于,它將傳統自動駕駛流程中的感知、預測、規劃與控制等多個模塊,融合為“看—想—做”一體的連貫過程,并試圖通過一個統一的網絡實現從圖像輸入到動作輸出的完整決策鏈條。
圖片源自:網絡
世界模型(WorldModel)則有著不同的核心設想。它不是單純地把感知和控制打包成一個模型,而是在系統內部構建一個對外部物理環境的“動態模擬器”。換句話說,世界模型不僅能讓自動駕駛系統看到當前的環境,還能在內部腦海里“演練”未來可能發生的場景。通過學習環境的動態規律,從而預測其他車輛、行人、信號燈等會如何變化,為決策提供更深層次的支持。世界模型的本質是在模型內部建立對世界的理解和因果關系,而不是只對當下圖像產生反應;它強調的是對未來的推演與預測能力。

兩種方法的本質差異
如果把自動駕駛比作“人類開車”,傳統模塊化方案就是把駕駛任務拆解為多個環節,一部分負責看路(感知),另一部分分析交通狀況(理解與預測),再一部分做出決策(規劃),最后一部分執行操作(控制)。VLA則是將這些環節盡可能地整合進一個統一的大模型,讓它能夠從視覺輸入直接生成動作輸出,并在模型內部借助語言或語義推理進行輔助決策。
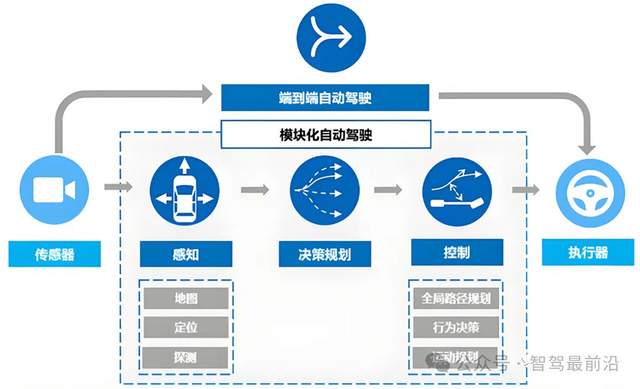
模塊化與端到端的區別,圖片源自:網絡
世界模型的思路則是在系統內部設置一塊看不見的“推演黑板”,持續模擬未來幾秒甚至更長時間的路況變化,并將預測結果反饋給決策模塊,使自動駕駛系統具備前瞻能力。
從技術角度看,VLA的核心是在一個統一的模型框架里融合感知、推理和動作生成,它的優勢在于能夠處理復雜的語義理解任務,同時使輸出更加自然、直觀。世界模型的核心是在模型內部建立對環境狀態和動態規律的認識,從而支持基于當前狀態進行多步未來預測。
VLA和世界模型在側重點上有所不同,VLA偏向“從感知到行動”的端到端映射和高層語義推理,世界模型則偏向環境動態的模擬與未來情景的推演。VLA更接近“圖像→語言→動作”的鏈式處理流程,而世界模型更側重于“內部環境模型構建與預測推演”。它們并非相互排斥的技術路線,而是分別強化了自動駕駛系統的不同能力維度。

實際應用中融合的可能性
VLA與世界模型并不是彼此割裂的技術路徑。就有技術顯示,可以將世界模型的預測能力與VLA的“感知—推理—動作”能力相結合,使兩者形成互補,從而提升自動駕駛系統的整體性能。
一種典型的融合思路是讓VLA模型在學習動作輸出的同時,也使其學習預測環境狀態的變化,這本質上就是把世界模型的能力嵌入到VLA的訓練目標中去。比如由中國科學院自動化研究所等機構提出的DriveVLA-W0框架,就提出利用世界模型來預測未來視圖,從而為VLA模型提供更密集的訓練信號。
傳統VLA模型主要是通過采集到的動作數據來監督訓練,由于動作信號維度低、信息稀疏,監督信號有限。引入世界模型后,模型還需預測未來圖像,這使其內部必須學習環境動態規律,從而提升了數據利用效率和模型泛化能力。該策略提升了模型對環境動態的理解,同時保留了VLA的端到端輸出能力。
圖片源自:網絡
此外,還有技術方案提出從架構層面推動兩者的統一,設計能夠同時涵蓋視覺、語言、動作與動態預測的融合模型。這類架構通過共享內部表示讓系統既具備良好的場景理解和動作規劃能力,又能預測未來狀態,這類融合模型在一些仿真測試或者機器人控制任務中表現出比單一方法更優的性能。雖然這些研究大多還處于實驗階段,但它們確實證明了VLA與世界模型在原理層面存在結合的可能性。

為什么融合能帶來優勢
自動駕駛的核心難點之一就是環境的復雜性和不確定性。駕駛環境瞬息萬變,不同車輛、行人、信號燈以及道路情況都會影響決策。單純依賴當前時刻的感知進行決策,難以應對未來幾秒內可能發生的復雜變化,世界模型所強調的內部預測優勢就在此處體現。世界模型讓系統不只是“看到現在”,還能“想象接下來可能發生什么”,從而支持更穩健的規劃。
此外,自動駕駛中的語義理解和高級推理也至關重要。車輛需要理解交通標志、判斷行人意圖、結合交通規則等,這些屬于更高層的認知任務。VLA在這方面有優勢,因為它借助大型視覺-語言模型的推理能力,可以把視覺輸入映射到語義空間,使自動駕駛系統具備更強的抽象理解能力。
如果把世界模型比作一個能預測未來的“內部仿真器”,把VLA比作一個能理解場景語義和規則的“大腦”,那么二者結合就能讓自動駕駛系統既能預判未來,又能做出基于語義理解的合適動作。這樣的融合可以讓系統在面對復雜場景時做出更穩健、更可靠的判斷和控制。

技術融合的難點與挑戰
想把世界模型引入VLA,訓練過程就需要更多計算資源和數據支持。世界模型的訓練依賴于從海量視頻序列中學習環境動態規律,通過預測未來幀或狀態來驅動內部表征的形成。這就需要極大規模的視頻數據與強大的計算資源支撐,而自動駕駛系統本身的訓練已對資源有很高要求,二者的結合將進一步提高訓練門檻。
融合后的模型結構也會變得更復雜。在VLA里面,原本就有感知和推理兩個大塊,現在又要增加世界模型部分的動態預測,這就要求內部表示既要適合高層語義任務,又要能支持未來預測。這兩種任務對內部表征的要求并不完全一致,這無疑增加了設計的難度。
實時性和車載部署也是難點。在實驗室里跑大模型并融合世界模型預測可能效果很好,但在實際車輛上實時運行時會有嚴格的延遲約束和算力限制。這就要求在模型設計時就考慮如何壓縮模型、如何在算力受限的環境中部署這種融合策略,否則就算理論上可行,在工程上也很難落地。

最后的話
VLA與世界模型雖然側重點不同,卻能為自動駕駛系統提供不同的能力。VLA主要解決系統能否在復雜交通場景中“看懂語義并做出合理動作”的問題;而世界模型則彌補了系統能否深入理解環境動態規律,在風險發生前進行預測與推演的能力。
將這兩種能力融入同一架構中,自動駕駛的決策將不再僅依賴于當前時刻的感知結果,而是建立在對場景語義、動態演變與未來預期的綜合理解之上。這種轉變意味著自動駕駛正從“高性能感知系統”邁向真正具備環境理解和因果推理能力的智能體,這才是它走向高可靠性和規模化落地所必須跨過的一道門檻。
審核編輯 黃宇
-
Vla
+關注
關注
0文章
20瀏覽量
5895 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179888
發布評論請先 登錄
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
FPGA在自動駕駛領域有哪些應用?
FPGA在自動駕駛領域有哪些優勢?
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
自動駕駛的到來
UWB主動定位系統在自動駕駛中的應用實踐
自動駕駛汽車的定位技術
自動駕駛中常提的世界模型是個啥?

自動駕駛上常提的VLA與世界模型有什么區別?
VLA和世界模型,誰才是自動駕駛的最優解?

VLA能解決自動駕駛中的哪些問題?

VLA與世界模型有什么不同?





 工商網監
工商網監
評論