 DRV8834電機驅動芯片:設計應用全解析
DRV8834電機驅動芯片:設計應用全解析

DRV8834電機驅動芯片:設計應用全解析
在電子設備的設計中,電機驅動是一個關鍵環節,而德州儀器(TI)的DRV8834電機驅動芯片,憑借其靈活的特性和出色的性能,在眾多應用場景中得到了廣泛應用。今天,我們就來深入了解一下DRV8834芯片的特性、應用及設計要點。
文件下載:drv8834.pdf
一、芯片特性概覽
1. 驅動能力
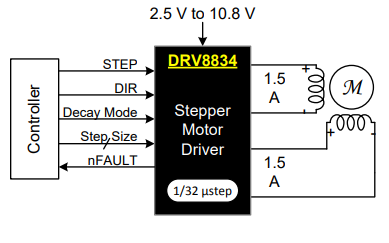
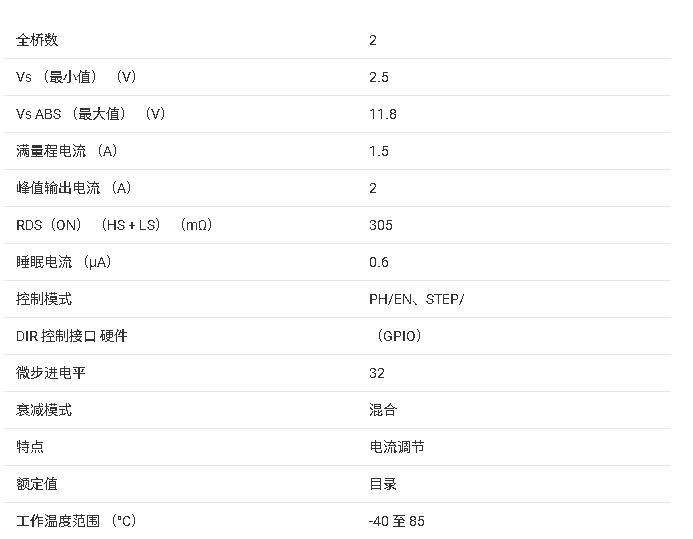
DRV8834是一款雙H橋電流控制電機驅動器,能夠驅動兩個直流(DC)電機或者一個步進電機。每個H橋在 (V_{M}=5V) 、25°C 的條件下,可實現1.5A的連續電流輸出和2.2A的峰值電流輸出。這種強大的驅動能力使其適用于多種功率需求的電機。
2. 控制模式多樣
它具備兩種控制模式,為不同的應用場景提供了靈活的選擇:
- 內置索引器邏輯(STEP/DIRECTION控制):通過簡單的STEP和DIRECTION信號,就能控制步進電機,并且支持高達1/32步的微步進,可實現電機的精確控制。
- PHASE/ENABLE控制:可以驅動外部參考信號,實現超過1/32步的微步進,滿足更高精度的控制需求。
3. 低導通電阻
在 (V{M}=5V) 、25°C 的條件下,其 (R{DS(ON)}) 僅為305mΩ (HS + LS),低導通電阻有助于降低功耗,提高芯片的效率和穩定性。
4. 寬電源電壓范圍
電源電壓范圍為2.5V至10.8V,這使得DRV8834能夠適應不同的電源環境,增加了其在不同應用中的適用性。
5. 動態 (t_{BLANK}) 和混合衰減模式
動態 (t_{BLANK}) 和混合衰減模式可確保微步進時電機運行更加平滑,減少電機的振動和噪聲。
6. 電流調節與限制
支持PWM繞組電流調節和限制功能,可有效保護電機和芯片,避免過電流損壞。
7. 熱增強型封裝
采用熱增強型表面貼裝封裝,有助于芯片散熱,提高了芯片的可靠性和穩定性。
二、應用場景廣泛
DRV8834的靈活性使其在眾多領域都有出色的表現,常見的應用場景包括:
- 電池供電玩具:其低功耗和小尺寸特點,非常適合電池供電的玩具,可延長玩具的續航時間。
- POS打印機:能夠精確控制電機,確保打印機的打印精度和速度。
- 視頻監控攝像機:可實現攝像機的云臺控制,實現精確的角度調整。
- 辦公自動化設備:如復印機、掃描儀等,可提供穩定的動力支持。
- 游戲機:為游戲機的各種動作部件提供驅動控制。
- 機器人:滿足機器人多關節電機的驅動需求,實現精確的運動控制。
三、芯片詳細描述
1. 配置模式
- 相/使能模式:在這種模式下,通過xPHASE輸入引腳控制每個H橋的電流方向,xENBL輸入引腳控制H橋的輸出使能。M1輸入引腳可以控制當 (xENBL=0) 時H橋的狀態。這種模式適用于直流電機的速度控制和步進電機的電流控制。
- 索引器模式:利用內置的微步進索引器,通過STEP和DIR輸入引腳就能控制步進電機的運動。M0和M1引腳用于配置步進格式,可實現全步、半步以及高達1/32步的微步進,提供了靈活的步進控制方式。
2. 功能特性
- 電流控制:通過固定頻率的PWM電流調節(電流斬波)來調節電機繞組的電流。對于步進電機,可實現正弦波電流變化,從而實現平滑運動的微步進;對于直流電機,可限制電機的啟動電流。動態 (t_{BLANK}) 時間可減少零電流附近的電流控制誤差,使電機運行更加平滑安靜。
- 電流再循環和衰減模式:支持快速、慢速和混合衰減三種模式。在PWM電流斬波過程中,當電流達到斬波閾值時,H橋會進入相應的衰減模式來處理再循環電流。對于直流電機,通常使用慢速衰減模式來減少電流紋波,優化速度控制;對于步進電機,可根據不同的電機和工作條件選擇合適的衰減模式,以減少機械噪聲和振動。
- 保護電路:具備完善的保護功能,包括過流保護(OCP)、熱關斷(TSD)和欠壓鎖定(UVLO)。當發生過流、過熱或欠壓等故障時,芯片會自動采取相應的保護措施,并通過nFAULT引腳輸出故障信號,確保芯片和電機的安全。
3. 睡眠模式
將nSLEEP引腳拉低,芯片將進入低功耗睡眠狀態。在睡眠狀態下,H橋禁用,柵極驅動電荷泵停止工作,所有內部邏輯復位,VINT電源關閉,所有內部時鐘停止。直到nSLEEP引腳恢復高電平,芯片才會退出睡眠狀態。在設計時,需要注意VINT電源在睡眠模式下不可用,nSLEEP引腳可直接上拉至電源(VM),但當VM大于5.75V時,需要使用上拉電阻。
四、應用與實現
1. 應用信息
DRV8834在不同的應用中,需要根據具體的電機和應用需求選擇合適的配置和參數。例如,對于感測電阻,應選擇表面貼裝、低電感、功率足夠的電阻,并將其靠近電機驅動器放置。在實際應用中,還需要考慮功率損耗、電流限制等因素。
2. 典型應用
- 相/使能模式驅動兩個直流電機:通過控制xENBL和xPHASE引腳,可以實現對兩個直流電機的獨立控制。M1引腳拉低可實現慢速衰減PWM控制電機速度,ADECAY和BDECAY引腳接地設置為慢速衰減模式。在設計時,需要根據電機的額定電流和電壓選擇合適的電源和感測電阻。
- 相/使能模式驅動一個步進電機:適用于全步或半步模式的步進電機控制。通過改變連接到ADECAY和BDECAY引腳的電阻值,可以設置衰減模式。M1引腳接VINT電源,可在xENBL引腳為低電平時實現零電流狀態。
- 索引器模式驅動一個步進電機:只需STEP引腳的上升沿就能使電機移動到下一步,DIR引腳可設置電機的旋轉方向。M0和M1引腳可配置步進模式,實現不同程度的微步進。
- 高分辨率微步進:使用具有兩個DAC輸出的微控制器,通過調節VREF信號,可以實現非常高分辨率的微步進控制。微控制器還可以動態設置每個線圈的衰減模式,提高控制的靈活性和精度。
五、電源與布局建議
1. 電源建議
- 大容量電容:在電機驅動系統設計中,合適的本地大容量電容至關重要。其容量大小取決于電機系統的最大電流需求、電源的電容和電流源/匯能力、電源與電機系統之間的寄生電感、可接受的電壓紋波、電機類型以及電機制動方法等因素。
- 電源旁路:VM引腳應使用低ESR陶瓷旁路電容進行旁路,建議值為0.01μF,電容應盡可能靠近VM引腳。同時,VM引腳還需使用合適的大容量電容進行旁路,可選擇電解電容,并放置在靠近DRV8834的位置。VINT引腳應使用2.2μF、6.3V的陶瓷電容旁路,且盡量靠近引腳放置。
2. 布局建議
- 布線:VM引腳和VCP引腳之間應放置一個低ESR陶瓷電容,建議值為0.01μF、16V,且盡量靠近引腳。合理的布線可以減少電磁干擾,提高芯片的穩定性。
- 散熱設計:DRV8834的最大輸出電流受芯片溫度影響,而芯片溫度又與環境溫度和PCB設計密切相關。Thermal數據手冊中的熱數據可作為參考,但準確的散熱設計需要通過實際測量或熱仿真來確定。芯片采用的PowerPAD?封裝通過暴露的焊盤散熱,因此需要將該焊盤與PCB上的銅層進行熱連接,可通過添加過孔將熱焊盤連接到接地層,以提高散熱效果。
總結
DRV8834電機驅動芯片以其豐富的功能、靈活的控制模式和廣泛的應用場景,為電子工程師在電機驅動設計方面提供了一個優秀的解決方案。在實際應用中,我們需要根據具體的需求和條件,合理選擇芯片的配置和參數,同時注意電源和布局設計,以確保芯片和電機系統的性能和穩定性。大家在使用DRV8834芯片的過程中,有沒有遇到過一些特別的問題或者有什么獨特的應用經驗呢?歡迎在評論區分享和討論。
-
電機驅動
+關注
關注
60文章
1455瀏覽量
89463 -
應用設計
+關注
關注
0文章
278瀏覽量
8637
發布評論請先 登錄
DRV8834具有32階分度器或雙路刷式直流電機驅動器

DRV8834 具有 32 步分度器或雙刷直流電機驅動器的 2.2A 低壓步進器(分度器或 PH/EN 控制器)

DRV8834雙橋步進電機或直流電機驅動器的數據手冊免費下載

?DRV8834雙橋步進/直流電機驅動器技術文檔總結



 工商網監
工商網監
評論