 德州儀器DRV8889-Q1/Q1A步進電機驅動器全解析
德州儀器DRV8889-Q1/Q1A步進電機驅動器全解析

德州儀器DRV8889-Q1/Q1A步進電機驅動器全解析
在汽車電子和工業自動化領域,步進電機驅動器起著至關重要的作用。今天我們就來詳細探討德州儀器(TI)推出的DRV8889 - Q1和DRV8889A - Q1汽車步進電機驅動器,這兩款器件以其豐富的功能和出色的性能,為電子工程師們提供了強大的解決方案。
文件下載:drv8889-q1.pdf
1. 特性亮點
1.1 汽車級認證與高精度微步進
這兩款器件均通過AEC - Q100汽車級認證,適用于各種汽車應用。其支持高達1/256的微步進,能實現極其平滑的運動控制,有效減少電機運行時的振動和噪音。想象一下,在汽車的頭燈位置調節系統中,如此高精度的微步進控制能讓頭燈的移動更加精準和流暢。
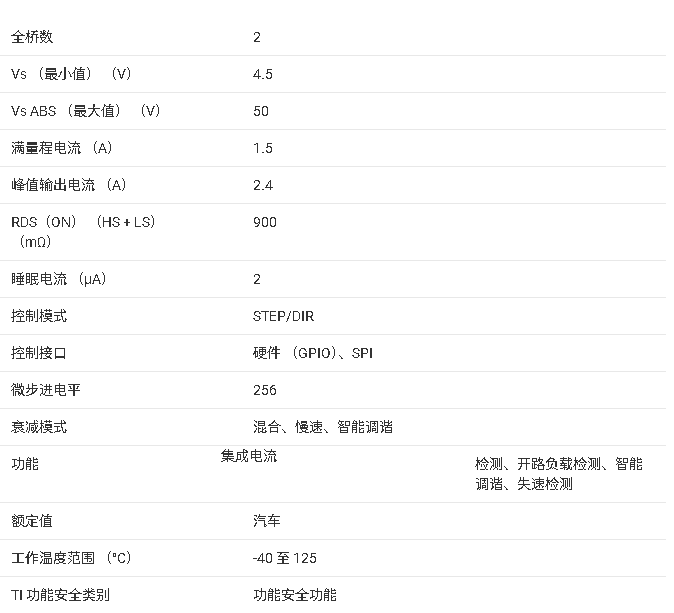
1.2 集成電流感測與智能調諧技術
集成電流感測功能省去了外部檢測電阻,不僅節省了電路板空間,還降低了成本。同時,智能調諧衰減技術提供多種衰減模式選項,如固定慢速、混合衰減模式等,能根據電機的運行狀態自動調整,優化電流調節性能。以一個復雜的工業自動化設備為例,電機的負載和轉速會不斷變化,智能調諧技術能讓驅動器快速適應這些變化,保證電機穩定運行。
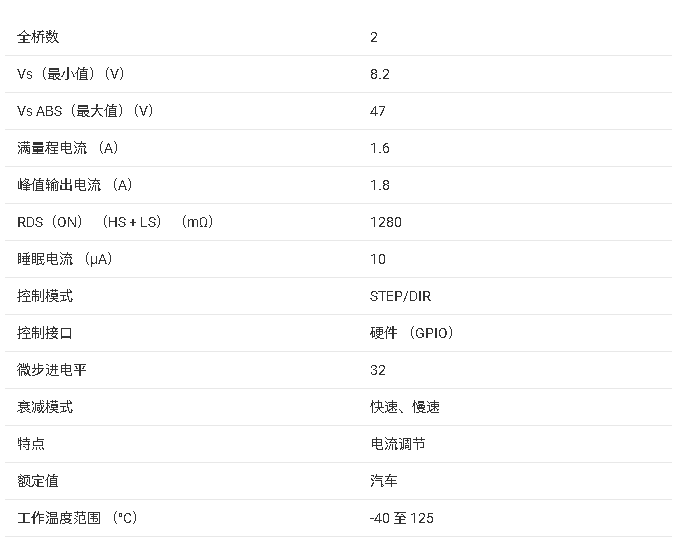
1.3 寬電壓范圍與高電流容量
工作電源電壓范圍為4.5至45V,能適應不同的電源環境。每橋具有高電流容量,如DRV8889/A - Q1的峰值電流可達2.4A,滿量程電流為1.5A,能驅動大功率的步進電機。在一些需要大力矩輸出的汽車執行機構中,這樣的高電流容量就能滿足其工作需求。
1.4 豐富的保護功能
具備VM欠壓鎖定、過流保護、堵轉檢測、開路檢測、過溫警告和關機、低溫警告等多種保護功能,還有故障狀態指示引腳(nFAULT)。這些保護功能就像給驅動器穿上了一層堅固的鎧甲,能有效防止器件在異常情況下損壞,提高系統的可靠性和穩定性。
2. 引腳配置與功能
DRV8889 - Q1和DRV8889A - Q1有HTSSOP和VQFN兩種封裝形式,每種封裝的引腳都有其特定的功能。例如,AOUT1和AOUT2是繞組A的輸出引腳,用于連接步進電機的繞組;DIR引腳是方向輸入引腳,通過邏輯電平設置步進方向;nSLEEP引腳用于控制驅動器進入低功耗睡眠模式,在系統不使用電機時,能有效降低功耗。了解這些引腳的功能是正確使用驅動器的關鍵,工程師們在設計電路時,需要根據實際需求合理連接各個引腳。
3. 規格參數
3.1 絕對最大額定值
給出了器件在各種條件下的最大承受值,如電源電壓(VM)的范圍為 - 0.3至50V,超過這些額定值可能會對器件造成永久性損壞。在實際應用中,工程師必須嚴格遵守這些額定值,確保器件在安全的工作范圍內運行。
3.2 電氣特性
詳細列出了器件在不同條件下的電氣參數,如VM工作電源電流、睡眠模式電源電流、喚醒時間、開啟時間等。這些參數對于評估器件的性能和功耗非常重要。例如,睡眠模式下低至2μA的電流消耗,能極大地降低系統的待機功耗。工程師們可以根據這些參數,合理設計電源電路和控制時序,優化系統性能。
3.3 熱信息
提供了不同封裝形式下的熱阻參數,如結到環境的熱阻(RθJA)、結到外殼的熱阻(RθJC)等。在設計散熱方案時,這些參數是必不可少的。通過合理的散熱設計,可以保證器件在高溫環境下也能穩定工作,延長器件的使用壽命。
4. 詳細工作原理
4.1 微步進索引器
內置的索引器邏輯支持多種步進模式,通過SPI寄存器中的MICROSTEP_MODE位進行配置。不同的步進模式對應著不同的電流和步進方向,能滿足各種應用場景的需求。例如,在需要高精度定位的場合,可以選擇高分辨率的微步進模式;而在對速度要求較高的場合,可以選擇全步或半步模式。
4.2 電流調節
通過PWM電流調節電路對電機繞組中的電流進行調節。當電流達到調節閾值時,驅動器進入衰減模式,根據TOFF寄存器的設置和所選的衰減模式來降低電流。衰減模式有慢速、混合、智能調諧動態衰減和智能調諧紋波控制等多種選項。不同的衰減模式適用于不同的電機負載和運行狀態,工程師需要根據實際情況進行選擇。例如,在電機負載變化較大的情況下,智能調諧動態衰減模式能自動調整衰減方案,保證電流的穩定調節。
4.3 保護電路
4.3.1 VM欠壓鎖定(UVLO)
當VM引腳電壓低于UVLO下降閾值時,所有輸出被禁用,電荷泵也被禁用;當電壓恢復到UVLO上升閾值以上時,正常操作恢復。這種保護機制能防止器件在低電壓下工作,避免因電壓不足而導致的故障。
4.3.2 過流保護(OCP)
當通過任何FET的電流超過設定值時,會觸發過流保護。過流保護有鎖存關斷和自動重試兩種模式。在鎖存關斷模式下,需要發送CLR_FLT命令或進行nSLEEP復位脈沖才能恢復正常;在自動重試模式下,經過一定時間后,如果故障條件消除,會自動恢復正常。這種靈活的保護模式能根據實際應用場景進行選擇,提高系統的可靠性和容錯能力。
4.3.3 堵轉檢測
通過檢測電機電流上升和下降象限之間的反電動勢相移,能檢測電機過載堵轉或行程終點的情況。該算法僅在智能調諧紋波控制衰減模式下工作,通過比較PWM關斷時間來生成TRQ_COUNT值,當該值低于設定的閾值時,判定為堵轉。在一些需要精確控制電機位置的應用中,堵轉檢測功能能及時發現電機的異常情況,避免設備損壞。
4.3.4 開路檢測
當繞組電流低于開路負載電流閾值且持續時間超過設定的檢測時間時,檢測到開路情況。開路檢測功能可以幫助工程師及時發現電機繞組的故障,提高系統的可維護性。
5. 應用與設計要點
5.1 典型應用
適用于汽車雙極步進電機的控制,如頭燈位置調節、平視顯示器(HUD)、HVAC步進電機、電子燃油噴射(EFI)等。以頭燈位置調節為例,驅動器能根據車輛的行駛狀態和環境條件,精確控制頭燈的角度,提高行車安全性。
5.2 設計步驟
5.2.1 確定電機速度和微步進級別
根據目標應用的需求,確定電機的速度和微步進級別。通過公式 (f{step }( steps / s)=frac{v(rpm) × 360(% / rot)}{theta{step }(% / step ) × n_{m}( steps / microstep ) × 60( s / min)}) 計算所需的STEP信號頻率。例如,在一個汽車自適應頭燈應用中,若電機需要以15°/步的角度旋轉,目標轉速為300rpm,微步進模式為1/8,則可計算出STEP信號頻率為960Hz。
5.2.2 電流調節
通過設置VREF電壓和TRQDAC參數來調節電機的滿量程電流。公式 (f{F S}(A)=frac{V{R E F}(V)}{K{V}(V / A)} × TRQ{-} DAC (%)=frac{V{REF }(V) × TRQ_DAC (%)}{2.2( V / A)}) 可用于計算滿量程電流。在實際應用中,要注意VREF引腳的最大允許電壓為3.3V,可以通過DVDD和電阻分壓器來提供VREF電壓。
5.2.3 衰減模式選擇
根據電機的負載和運行狀態,選擇合適的衰減模式。不同的衰減模式在電流紋波和調節速度上有所不同。例如,在需要低電流紋波的應用中,可以選擇智能調諧紋波控制模式;而在對調節速度要求較高的應用中,可以選擇快速衰減模式。
5.3 熱管理
在設計過程中,熱管理是一個重要的環節。總功耗由傳導損耗、開關損耗和靜態電流損耗組成。通過合理的散熱設計,如選擇合適的PCB類型、增加散熱面積、使用散熱片等,可以降低器件的溫度,提高系統的穩定性和可靠性。例如,在一個高功率的汽車步進電機驅動系統中,如果散熱設計不當,可能會導致器件過熱,影響其性能和壽命。
6. 編程與配置
6.1 SPI通信
采用全雙工4線同步SPI通信,支持單從設備、多從設備并行連接和多從設備菊花鏈連接三種配置方式。SPI輸入數據字為16位,包含讀寫位、地址位和數據位;輸出數據字包含狀態寄存器和報告字。在實際應用中,工程師需要根據具體的連接方式和通信需求,正確配置SPI通信參數。
6.2 寄存器映射
提供了詳細的寄存器映射表,包括狀態寄存器和控制寄存器。狀態寄存器用于報告警告和故障情況,控制寄存器用于配置器件的各種參數。例如,通過設置MICROSTEP_MODE位可以選擇步進模式,設置EN_OL位可以啟用或禁用開路檢測功能。工程師需要熟悉這些寄存器的功能和使用方法,以便對驅動器進行精確的配置和控制。
德州儀器的DRV8889 - Q1和DRV8889A - Q1步進電機驅動器憑借其豐富的特性、強大的功能和良好的性能,為汽車和工業自動化領域的步進電機控制提供了優秀的解決方案。作為電子工程師,我們在實際應用中,需要深入理解其工作原理和設計要點,結合具體的應用需求,合理選擇和配置器件,以實現高效、穩定的步進電機控制。大家在使用這兩款驅動器的過程中遇到過哪些問題呢?又是如何解決的呢?歡迎在評論區分享交流。
-
汽車電子
+關注
關注
3045文章
9043瀏覽量
173026 -
步進電機驅動器
+關注
關注
0文章
141瀏覽量
13675
發布評論請先 登錄
德州儀器UCC2732x-Q1 MOSFET驅動器:性能、應用與設計要點
DRV8823-Q1:汽車應用的雙步進電機驅動解決方案
德州儀器DRV8436步進電機驅動器:特性、應用與設計深度解析
DRV8899-Q1汽車步進驅動器:特性、應用與設計要點
DRV8245-Q1汽車H橋驅動器:功能特性與應用解析
德州儀器DRV8244-Q1汽車H橋驅動器:特性、應用與技術解析
DRV8316-Q1:高性能三相集成FET電機驅動器的深度解析
德州儀器DRV8242-Q1汽車H橋驅動器:特性、應用與設計要點
DRV8434A - Q1汽車步進驅動器:技術剖析與設計指南
?DRV8824-Q1 汽車級步進電機驅動器技術文檔總結
?DRV8889-Q1 汽車級步進電機驅動器技術文檔總結
德州儀器DRV8143H-Q1EVM電機驅動器評估模塊技術解析



 工商網監
工商網監
評論