 深入剖析 DRV8434A:高性能步進電機驅動的理想之選
深入剖析 DRV8434A:高性能步進電機驅動的理想之選

深入剖析 DRV8434A:高性能步進電機驅動的理想之選
在電子工程領域,步進電機驅動芯片的性能直接影響到整個系統的穩定性和效率。今天,我們就來詳細探討一下德州儀器(TI)推出的 DRV8434A 步進電機驅動芯片,看看它有哪些獨特的特性和優勢。
文件下載:drv8434a.pdf
1. 產品概述
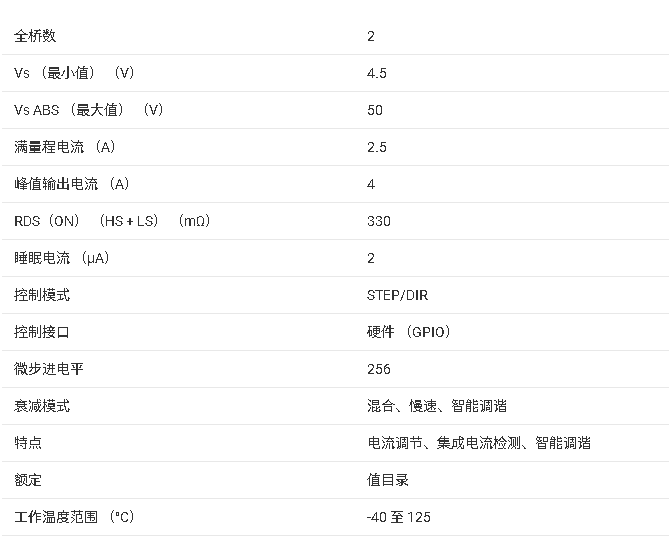
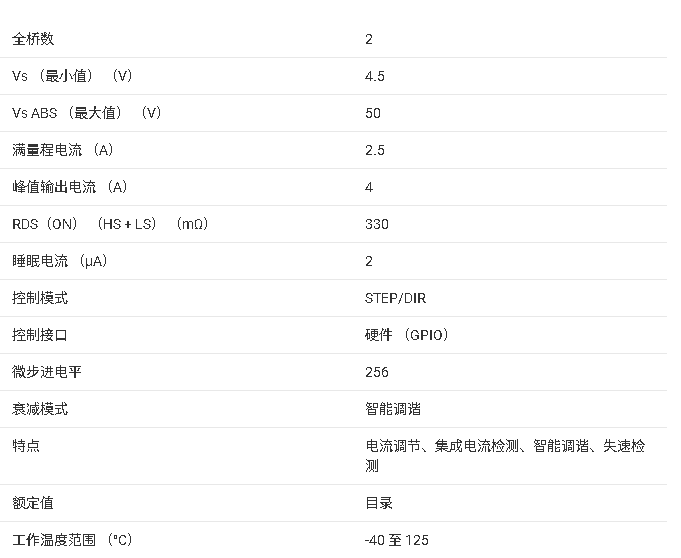
DRV8434A 是一款專為工業和消費應用設計的步進電機驅動器,適用于多種場景,如打印機、掃描儀、ATM 機、紡織機、舞臺照明設備、辦公和家庭自動化、工廠自動化和機器人、醫療應用以及 3D 打印機等。它具備高度集成的特性,集成了兩個 N 通道功率 MOSFET H 橋驅動器、微步進索引器和集成電流感應功能,能夠提供高達 2.5A 的滿量程輸出電流(具體取決于 PCB 散熱設計)。
2. 核心特性亮點
2.1 PWM 微步進驅動
- 簡單接口:采用簡單的 STEP/DIR 接口,方便外部控制器管理步進電機的方向和步進速率。
- 高分辨率微步進:支持高達 1/256 的微步進索引,能夠實現高精度的電機控制,有效降低電機運行時的噪音,使電機運行更加平穩。
2.2 集成電流感應功能
- 無需外部感測電阻:采用內部電流感測架構,無需使用兩個外部功率感測電阻,不僅節省了 PCB 面積和系統成本,還減少了功率消耗。
- 高精度電流控制:具有±4%的滿量程電流精度,能夠精確控制電機電流,確保電機性能的穩定性。
2.3 智能調諧紋波控制衰減
通過智能調諧紋波控制衰減模式,使用可變關斷時間、紋波電流控制方案,最大限度地減少電機繞組電流的失真,提高電機效率和系統性能。
2.4 失速檢測功能
- 獨特檢測方式:利用 GPIO 引腳實現失速檢測,通過檢測電機電流上升和下降象限之間的反電動勢相移,能夠檢測電機過載失速情況或行程終點。
- 提高系統效率:系統設計人員可以根據失速檢測結果采取相應措施,提高系統效率,防止電機損壞,降低噪音。
2.5 寬電壓范圍與低功耗設計
- 寬電壓工作范圍:支持 4.5 至 48V 的工作電源電壓范圍,適用于多種電源環境。
- 低功耗睡眠模式:具有低電流睡眠模式(2μA),在不驅動電機時可有效節省系統功耗。
2.6 低 EMI 設計
集成了擴頻時鐘功能,用于內部數字振蕩器和內部電荷泵,最大限度地減少設備的輻射發射。
2.7 豐富的保護特性
具備多種保護功能,如 VM 欠壓鎖定(UVLO)、電荷泵欠壓(CPUV)、過流保護(OCP)、無傳感器失速檢測、開路負載檢測(OL)、熱關斷(OTSD)和故障狀態輸出(nFAULT)等,確保設備在各種異常情況下的安全性和可靠性。
3. 引腳配置與功能詳解
DRV8434A 提供了兩種封裝形式:HTSSOP(28)和 VQFN(24)。不同引腳具有不同的功能,以下是一些關鍵引腳的介紹:
- AOUT1 和 AOUT2、BOUT1 和 BOUT2:分別為繞組 A 和繞組 B 的輸出引腳,用于連接步進電機的繞組。
- PGND:電源接地引腳,需連接到系統接地。
- DIR:方向輸入引腳,通過邏輯電平設置步進方向。
- ENABLE:使能引腳,邏輯低電平時禁用設備輸出,邏輯高電平時啟用設備輸出,高阻態時啟用 8 倍扭矩計數縮放。
- VREF:電流設置參考輸入引腳,最大值為 3.3V,可通過電阻分壓器使用 DVDD 提供 VREF。
- M0 和 M1:微步進模式設置引腳,用于設置步進模式。
- STL_MODE:失速檢測模式編程引腳,可根據不同的輸入電平設置失速檢測模式。
- TRQ_CNT/STL_TH:扭矩計數模擬輸出或失速閾值模擬輸入引腳,具體功能取決于 STL_MODE 引腳的輸入電平。
- STL_REP:失速故障報告輸出引腳,為開漏輸出,需要上拉電阻。
- nFAULT:故障輸出引腳,檢測到故障時拉低,為開漏輸出,需要上拉電阻。
- nSLEEP:睡眠模式控制引腳,邏輯高電平時啟用設備,邏輯低電平時進入低功率睡眠模式,低脈沖可清除故障。
4. 技術參數分析
4.1 絕對最大額定值
了解設備的絕對最大額定值對于確保設備的安全運行至關重要。DRV8434A 的絕對最大額定值包括電源電壓、電荷泵電壓、控制引腳電壓、輸出電流等參數,在設計時必須確保不超過這些額定值,以免造成設備永久性損壞。
4.2 ESD 額定值
該設備具有一定的靜電放電(ESD)防護能力,人體模型(HBM)的 ESD 額定值為±2000V,不同引腳的充電設備模型(CDM)額定值有所不同。在處理和安裝設備時,應采取適當的防靜電措施,以防止 ESD 損壞。
4.3 推薦工作條件
為了保證設備的最佳性能,建議在推薦的工作條件下使用。包括電源電壓范圍、邏輯電平輸入電壓、VREF 電壓、STEP 信號頻率、電機滿量程電流和 RMS 電流等參數都有明確的推薦值。
4.4 熱信息
熱性能是影響設備可靠性的重要因素之一。文檔中提供了不同封裝形式下的熱阻參數,如結到環境熱阻(RθJA)、結到外殼熱阻(RθJC)等,在設計 PCB 時需要考慮這些參數,以確保設備在正常工作溫度范圍內。
4.5 電氣特性
詳細介紹了設備在不同工作條件下的電氣特性,如電源電流、睡眠模式電流、開關時間、輸入輸出電壓和電流等參數。這些參數對于電路設計和性能評估非常重要。
4.6 索引器時序要求
明確了 STEP 信號的頻率、脈沖持續時間、DIR 或 MODEx 信號的建立時間和保持時間等時序要求,確保步進電機能夠按照預期的方式運行。
5. 功能模塊解析
5.1 整體架構與工作原理
DRV8434A 集成了兩個 N 通道功率 MOSFET H 橋、電流感測電阻和調節電路以及微步進索引器,通過內部電流感測架構實現電流控制。外部控制器通過 STEP/DIR 接口控制電機的方向和步進速率,內部微步進索引器可執行高精度微步進,無需外部控制器管理繞組電流水平。
5.2 電流額定值
- 峰值電流:由過流保護跳閘閾值(IOCP)限制,DRV8434A 的峰值電流額定值為每橋 4A。
- RMS 電流:由 IC 的熱考慮因素決定,DRV8434A 的 RMS 電流額定值為每橋 1.8A。
- 滿量程電流:描述了微步進時正弦電流波形的頂部,與 RMS 電流相關,由設備的熱考慮因素決定。
5.3 PWM 電機驅動
通過兩個全 H 橋驅動器驅動雙極步進電機的兩個繞組,采用 PWM 電流控制方案,根據 VREF 引腳的電壓設置電流調節點。
5.4 微步進索引器
內置的索引器邏輯允許通過 M0 和 M1 引腳配置多種步進模式,包括全步、半步和不同分辨率的微步進模式。不同的步進模式對應不同的電流和步進方向,可根據實際需求選擇合適的模式。
5.5 電流調節與衰減模式
采用智能調諧紋波控制衰減模式,在 PWM 電流調節期間僅使用慢衰減。通過比較器監測電流感測 MOSFET 上的電壓,實現電流調節。當電流達到斬波閾值時,H 橋進入慢衰減狀態,使電流在繞組中重新循環。
5.6 電荷泵
集成的電荷泵用于為高端 N 通道 MOSFET 提供柵極驅動電壓,需要在 VM 和 VCP 引腳之間連接一個存儲電容,以及在 CPH 和 CPL 引腳之間連接一個飛跨電容。
5.7 線性電壓調節器
為 DVDD 集成了線性電壓調節器,可提供 VREF 參考電壓,最大負載電流為 2mA。在設計時,需要使用陶瓷電容將 DVDD 引腳旁路到地,以確保穩定的輸出電壓。
5.8 邏輯電平、三電平與四電平引腳
不同引腳具有不同的輸入結構,如 M0、STL_MODE 和 ENABLE 引腳為三電平輸入,M1 引腳為四電平輸入,STEP、DIR 和 nSLEEP 引腳為邏輯電平輸入。這些引腳的輸入結構和電平要求對于正確配置設備功能至關重要。
5.9 保護電路
- VM 欠壓鎖定(UVLO):當 VM 引腳電壓低于 UVLO 閾值時,所有輸出禁用,nFAULT 引腳拉低,電壓恢復正常后恢復正常運行。
- VCP 欠壓鎖定(CPUV):當 VCP 引腳電壓低于 CPUV 電壓時,所有輸出禁用,nFAULT 引腳拉低,電壓恢復正常后恢復正常運行。
- 過流保護(OCP):當 FET 電流超過限制且持續時間超過 tOCP 時,兩個 H 橋的 FET 禁用,nFAULT 引腳拉低,經過 tRETRY 時間且故障條件消除后自動恢復正常。
- 失速檢測:通過檢測電機電流的反電動勢相移來檢測失速情況,可通過 STL_MODE、STL_REP 和 TRQ_CNT/STL_TH 引腳配置失速檢測模式。
- 開路負載檢測(OL):當繞組電流低于開路負載電流閾值且持續時間超過 tOL 時,檢測到開路負載情況,故障條件消除后恢復正常。
- 熱關斷(OTSD):當芯片溫度超過熱關斷極限時,H 橋的所有 MOSFET 禁用,nFAULT 引腳拉低,溫度下降到閾值以下后恢復正常。
6. 應用與設計要點
6.1 典型應用電路
文檔中給出了 HTSSOP 和 VQFN 封裝的典型應用原理圖,在設計時需要根據實際需求選擇合適的封裝,并按照推薦的電路參數配置外部元件。
6.2 設計流程
- 確定電機速度和微步進級別:根據目標應用的要求,確定所需的電機速度和微步進級別,使用公式計算 STEP 引腳的信號頻率。
- 電流調節:根據 VREF 電壓和 TRQ_DAC 設置確定電機的滿量程電流,確保 VREF 引腳電壓不超過 3.3V。
- 衰減模式:DRV8434A 采用智能調諧紋波控制衰減模式,當電機繞組電流達到電流斬波閾值時,進入慢衰減狀態。
- 熱應用:需要計算設備的功耗和結溫,包括傳導損耗、開關損耗和靜態電流消耗引起的功率損耗。根據熱阻參數和環境溫度估算結溫,確保設備在安全的溫度范圍內運行。
6.3 電源供應建議
設備設計用于 4.5V 至 48V 的輸入電源電壓范圍,需要在每個 VM 引腳附近放置一個 0.01μF 的陶瓷電容,并在 VM 上添加一個大容量電容。大容量電容的選擇需要考慮多個因素,如電機系統所需的最大電流、電源的電容和供電能力、寄生電感、允許的電壓紋波等,通常需要通過系統級測試來確定合適的電容值。
6.4 布局注意事項
- VM 引腳:使用低 ESR 的陶瓷旁路電容將 VM 引腳旁路到 PGND,并盡可能靠近 VM 引腳放置,使用厚走線或接地平面連接到設備的 PGND 引腳。同時,需要使用大容量電容將 VM 引腳旁路到地。
- 電荷泵相關引腳:在 CPL 和 CPH 引腳之間放置一個 0.022μF 的低 ESR 陶瓷電容,在 VM 和 VCP 引腳之間放置一個 0.22μF 的低 ESR 陶瓷電容,并盡可能靠近引腳放置。
- DVDD 引腳:使用 0.47μF 的低 ESR 陶瓷電容將 DVDD 引腳旁路到地,并盡可能靠近引腳放置。
7. 總結
DRV8434A 作為一款高性能的步進電機驅動芯片,具有高度集成、高精度、低功耗、低 EMI 和豐富的保護特性等優點,適用于多種工業和消費應用場景。在設計過程中,需要充分了解其引腳功能、技術參數、功能模塊和應用要點,合理選擇外部元件,優化 PCB 布局,以確保設備的性能和可靠性。同時,要注意遵循文檔中給出的推薦工作條件和設計指南,避免因不當操作導致設備損壞或性能下降。你在使用 DRV8434A 或其他步進電機驅動芯片時遇到過哪些問題呢?歡迎在評論區分享你的經驗和想法。
-
步進電機驅動
+關注
關注
1文章
52瀏覽量
15316
發布評論請先 登錄
DRV8434步進電機驅動器:高效集成與智能控制的完美結合
DRV8434S步進電機驅動器:特性、應用與設計指南
DRV8434A - Q1汽車步進驅動器:技術剖析與設計指南
?DRV8434步進電機驅動器技術文檔總結
?DRV8434A 步進電機驅動器技術文檔總結



 工商網監
工商網監
評論