 Aumovio案例研究 | 軟件即產品(SWaap)背景下的模型系統工程與閉環系統驗證
Aumovio案例研究 | 軟件即產品(SWaap)背景下的模型系統工程與閉環系統驗證

客戶背景
Aumovio作為一家科技公司,致力于為當前及未來的移動出行挑戰提供硬件、軟件與服務的最佳融合方案。
挑戰
在軟件即產品(Software as a Product,SWaaP)的應用背景下,本案例需要基于Level1虛擬ECU,實現電動尾門的模型化系統工程和閉環系統驗證。同時,需要確保虛擬系統行為與真實系統具有足夠的一致性與準確性。
SWaaP方案的核心挑戰在于:在沒有真實硬件的情況下,需要實現足夠精確的系統行為建模,以支撐系統與軟件的開發、集成和驗證。同時,需要推動開發與驗證工作的生命周期前移。為此,需要構建一個可用于系統與軟件開發,閉環系統驗證的虛擬等效環境。
針對虛擬電動尾門系統的關鍵設計參數與挑戰包括:
時間分辨率與仿真同步性
閉環系統行為的穩定性
虛擬與真實系統行為及驗證的一致性(例如夾手檢測的精度)
復用現有HIL模型的能力
將軟件組件集成到虛擬系統/ECU的復雜度
執行自動化測試
解決方案
為系統中的每個組件創建虛擬模型,并將這些虛擬模型互相連接。
真實硬件系統由運行在目標板上的電機控制模型,以及用于控制車輛尾門的硬件組成(如電機、霍爾傳感器、H橋等)。在虛擬系統中,電機控制模型以軟件組件(MotCtrl)的形式運行在由vVIRTUALtarget生成的vECU中。基于Simulink開發的被控對象模型包含:H橋、電機、尾門的機械仿真模型以及整個傳感器部分,由這些模型組成虛擬測試環境。vECU與被控對象模型通過CANoe仿真環境中的CAPL腳本互相關聯,同時,CANoe作為vECU和被控對象模型的運行環境,能夠確保仿真過程中各組件之間的時間同步性。
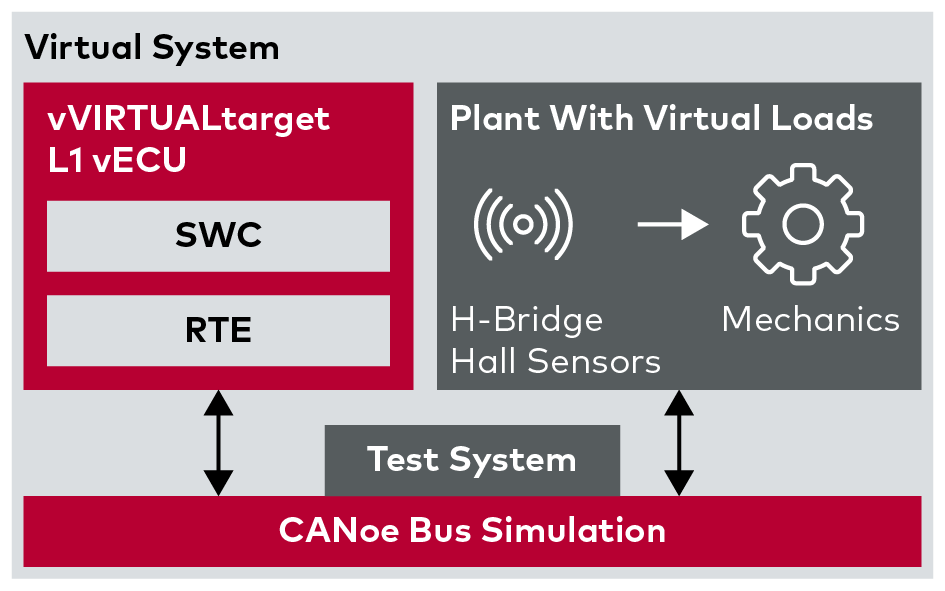
電動尾門閉環系統的虛擬測試架構
優勢
借助虛擬模型,將軟件和系統開發、集成與驗證前移,從而提升質量,同時降低成本。
該方案的主要優勢包括:
>
軟件組件在vECU中的集成相對容易
>
被控對象模型在CANoe環境中的嵌入較為容易
>
軟件組件與模型可復用于真實目標系統
>
為后續目標硬件集成做準備
>
無需真實硬件即可執行閉環測試和調試
>
可實現基礎系統驗證
-
電機控制
+關注
關注
3600文章
2131瀏覽量
277678 -
軟件
+關注
關注
69文章
5332瀏覽量
91573 -
模型
+關注
關注
1文章
3751瀏覽量
52097
發布評論請先 登錄
GNSS系統工程師-深圳
誠聘 資深電聲系統工程師
ETest_CPS工業信息物理系統驗證測試平臺的用途
智能水資源系統工程探討
基于SystemC的系統驗證研究和應用
自動駕駛系統驗證需要考慮的因素
高壓電氣系統驗證


汽車SPICE與基于模型的系統工程
基于架構設計的車載網聯系統驗證體系研究
如何實現基于模型的系統工程



 工商網監
工商網監
評論