") 成本下降+算法突破,UWB技術(shù)是否迎來在割草機器人領域爆發(fā)的拐點?
成本下降+算法突破,UWB技術(shù)是否迎來在割草機器人領域爆發(fā)的拐點?

?
一、割草機器人行業(yè)現(xiàn)狀與市場潛力
1.1 市場規(guī)模與增長趨勢
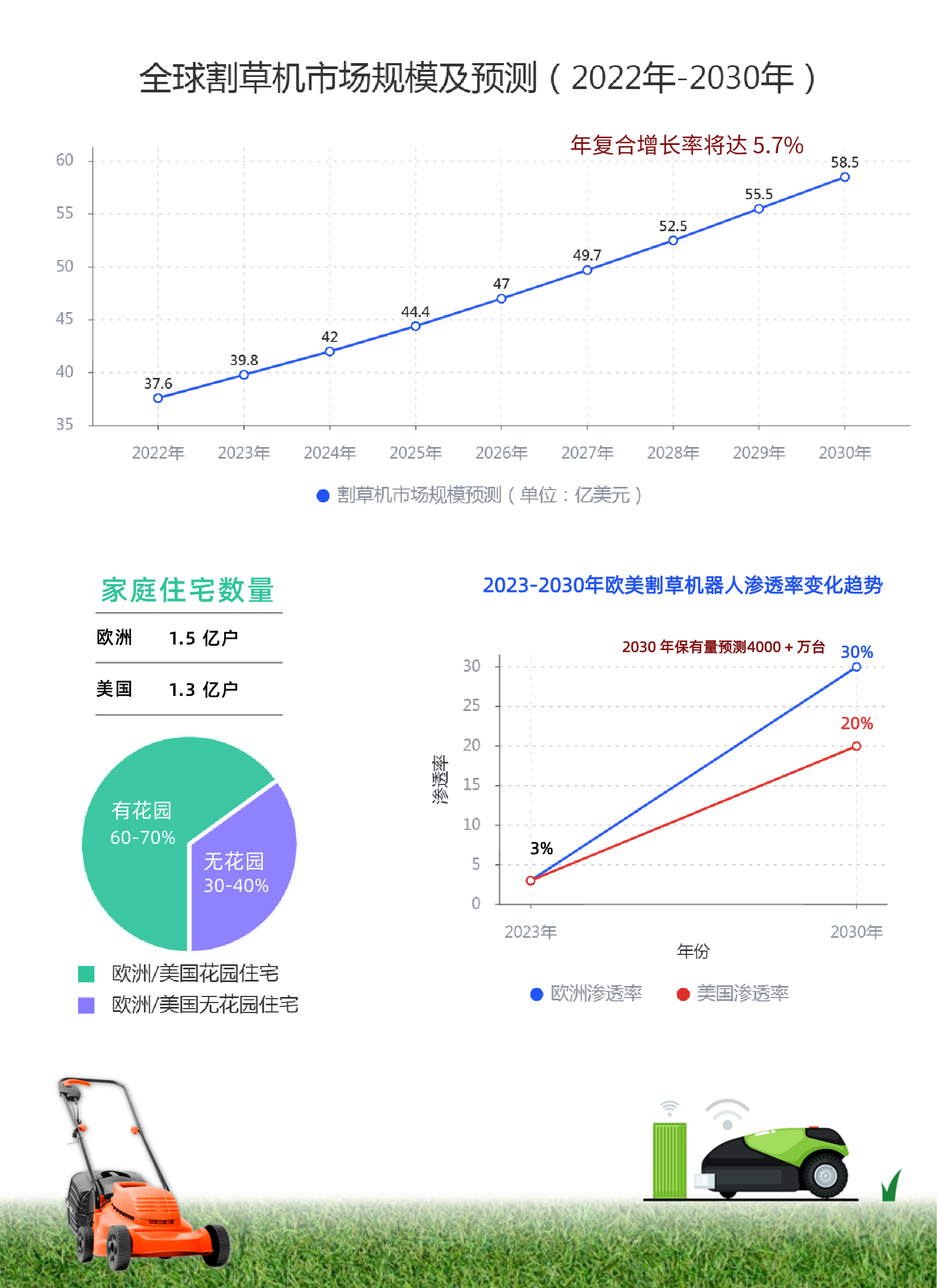
據(jù)Grand View Research數(shù)據(jù),2024年全球割草機市場規(guī)模為42億美元,預計2022-2030年的年復合增長率將達 5.7%。從保有量角度看,歐洲市場約1.5億戶家庭住宅,美國市場 1.3億戶家庭住宅,其中約60%-70% 擁有住宅花園,即將近8000萬。當前割草機器人整體保有量滲透率不足3%。若樂觀假設,到2030年歐洲整體保有量滲透率提升至30%,美國提升至20%,割草機器人保有量將增至4000+萬臺。
從增量替代角度分析,割草機器人正逐步替代手推式和手持式割草機。目前全球手持+手推式割草機銷量在2600-3000萬臺,美國市場1400-1500萬臺,歐洲市場1200-1500萬臺。割草機器人在歐洲銷量滲透率為7%-8%,美國為1%。保守假設到2030年,歐洲銷量滲透率提高到20%-30%,美國為10%-20%,則割草機器人年銷量將突破500+萬臺。
1.2 技術(shù)路線與競爭格局
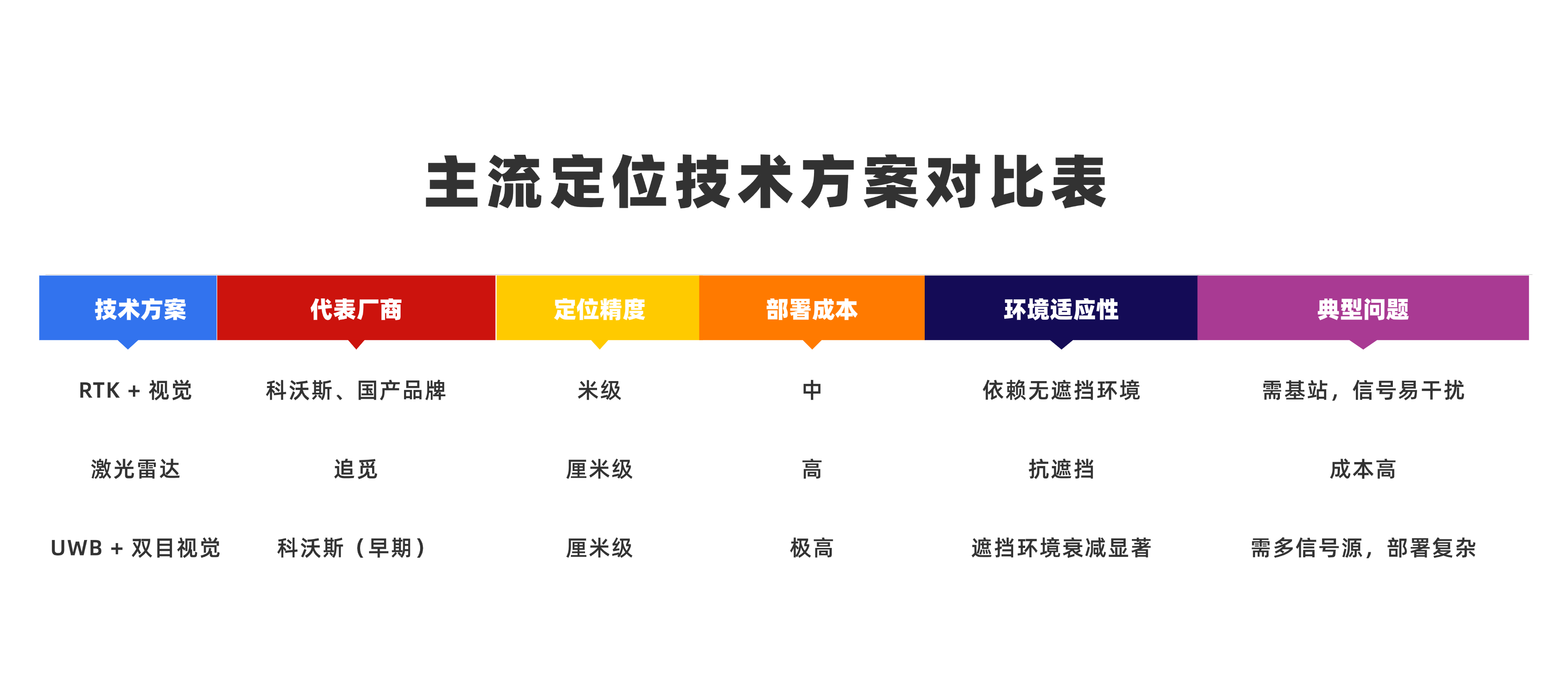
目前國內(nèi)割草機普遍采用“RTK+視覺”的技術(shù)路線,激光雷達因成本較高尚未成為主流。例如追覓是首家將激光雷達用于割草機器人的廠商。激光雷達精度高、部署簡便且不受遮擋影響;而RTK方案則需搭建基站,信號易受干擾且依賴視覺輔助。此外,還有部分企業(yè)嘗試其他技術(shù)組合,如科沃斯早期有嘗試過UWB+雙目視覺路線。
在競爭格局方面,市場參與者眾多,既有傳統(tǒng)園林工具企業(yè),也有科技企業(yè)跨界進入。當然,也有不少先后停掉相關業(yè)務的,如安克創(chuàng)新、iRobot、河森堡等。
二、UWB 技術(shù)特性及其在割草機應用中的理論優(yōu)勢
2.1 UWB 技術(shù)原理與特點
UWB 定位技術(shù)基于時間差測量(TDOA)或到達時間(TOF)的測距方法,利用超寬帶脈沖信號的高時間分辨率實現(xiàn)厘米級定位精度。其抗多徑干擾能力強,電磁兼容性好,能效較高,功耗低。
2.2 在割草機應用中的潛在優(yōu)勢
在割草機的路徑規(guī)劃方面,UWB的高精度定位可以使割草機更精準地按照預設路徑作業(yè),減少重復作業(yè)區(qū)域,提高割草效率。
在避障方面,UWB配合其他如攝像頭、碰撞傳感器等,能夠?qū)崟r、精準地感知割草機周圍障礙物的位置,實現(xiàn)更可靠的避障。在庭院等復雜環(huán)境中,存在樹木、臺階、圍欄等多種障礙物,UWB的高精度定位可幫助割草機更好地識別和避開這些障礙物,降低碰撞風險,保護割草機和周圍物品安全。
從作業(yè)效率優(yōu)化角度,精準的定位可以讓割草機合理規(guī)劃割草順序和速度,減少不必要的移動和等待時間,提高單位時間內(nèi)的割草面積,從而提升整體作業(yè)效率。
三、UWB 在割草機行業(yè)的實際應用案例與成效
3.1 科沃斯的早期嘗試
2022年10月,科沃斯推出了智能割草機器人GOAT G1,首次使用UWB超帶寬無線載波通信技術(shù)。當時,UWB技術(shù)被期望能夠提升割草機器人的定位精度和環(huán)境感知能力,為用戶提供更智能、高效的割草體驗。
3.2 應用成效與問題分析
在實際應用中,UWB技術(shù)確實在一定程度上提高了割草機器人的定位精度,在信號良好的情況下,能夠輔助割草機更準確地規(guī)劃路徑和執(zhí)行割草任務。
然而,UWB也暴露出明顯的缺點。移動端(割草機器人本體)為取得精準坐標,至少需要三個信號源來計算并獲取xy坐標值(若是有高度差的草坪還需要考慮z軸坐標值,則至少還要多布一個信號源),這不僅增加了成本,還需要在家庭草坪庭院內(nèi)安插至少3個信號樁,且信號樁可能還需穩(wěn)定供電(內(nèi)置電池則需定期更換),給用戶帶來極大不便。此外,UWB在遮擋環(huán)境下信號衰減顯著,定位精度不如RTK,科沃斯后續(xù)產(chǎn)品因此放棄了UWB,轉(zhuǎn)為RTK+視覺路線。
四、UWB 在割草機應用中的挑戰(zhàn)與限制
4.1 技術(shù)層面的挑戰(zhàn)
UWB信號在遇到遮擋時,如被建筑物、樹木等遮擋,信號衰減明顯,導致定位精度大幅下降甚至定位失效。在庭院環(huán)境中,花園內(nèi)的樹木、亭子等障礙物眾多,會嚴重影響UWB信號的傳播,使得割草機器人在這些區(qū)域難以獲得準確的定位信息,無法正常作業(yè)。實際應用中,與RTK等技術(shù)相比,在復雜環(huán)境下,UWB難以持續(xù)提供穩(wěn)定、高精度的定位,影響割草機的作業(yè)質(zhì)量和效率。
4.2 成本與部署難度挑戰(zhàn)
4.2.1 硬件成本增加
如前文所述,割草機器人本體要實現(xiàn)精準定位,需多個信號源,這增加了硬件成本。每個信號源的采購、安裝以及維護都需要投入資金,使得采用UWB方案的割草機器人整體成本上升,在市場競爭中處于價格劣勢。
4.2.2 部署復雜性
在家庭庭院中部署UWB信號源,需要考慮信號源的位置選擇、高度設置、供電方式等諸多因素。信號源位置設置不當,會影響定位精度;供電問題若處理不好,如采用內(nèi)置電池需頻繁更換,會給用戶帶來極大不便。相比之下,一些其他定位方案,如“RTK + 視覺”中的RTK方案,雖然也有基站搭建問題,但在信號覆蓋和維護方面相對UWB的多信號源部署要簡單一些。
4.3 行業(yè)標準與法規(guī)限制
UWB技術(shù)的頻段使用等受到相關法規(guī)的嚴格限制。2023年工信部對UWB技術(shù)的使用頻率范圍進行了收窄(規(guī)定UWB地面工作頻率范圍在CH7-CH9),并對發(fā)射功率進行了嚴格限制(等效全向輻射功率譜密度限制為不大于-41dBm/MHz)。這可能導致一些基于舊頻段設計的UWB設備需要進行升級或重新設計,增加了企業(yè)的研發(fā)成本和時間成本。
五、UWB 與其他技術(shù)融合在割草機中的應用探索
5.1 UWB與IMU融合
5.1.1 融合原理與優(yōu)勢
UWB與慣性測量單元(IMU)具有互補性。UWB提供全局絕對位置,但易受遮擋影響;IMU通過加速度計和陀螺儀測量載體的線加速度和角速度,通過積分計算位置和姿態(tài),具有高頻輸出(≥100Hz)、實時性強的特點,適用于動態(tài)環(huán)境下的姿態(tài)估計,但存在累積誤差隨時間增長的問題。通過擴展卡爾曼濾波器(EKF)融合兩者數(shù)據(jù),可實現(xiàn)優(yōu)勢互補:UWB校正IMU的累積誤差,IMU彌補UWB的低更新率。
在割草機作業(yè)時,當UWB信號受到遮擋,IMU可以繼續(xù)提供相對運動信息,保證割草機的姿態(tài)和位置估計的連續(xù)性;而當UWB信號恢復正常時,又可以對IMU的累積誤差進行校正,從而提高整體定位的魯棒性和精度。

5.1.2 實際應用案例與效果
在一些研究和試驗中,將UWB與IMU融合的方案應用于割草機模型。結(jié)果顯示,在模擬的復雜庭院環(huán)境中,割草機在面對信號遮擋等情況時,依然能夠較為穩(wěn)定地保持作業(yè)路徑,定位精度在一定程度上得到保障。相比單獨使用UWB或IMU,融合方案減少了定位誤差的累積,提高了割草機在動態(tài)環(huán)境下的適應性。然而,該方案在實際大規(guī)模應用中仍面臨一些挑戰(zhàn),如EKF算法的計算復雜度較高,對割草機的硬件計算能力有一定要求,可能增加硬件成本;同時,如何進一步優(yōu)化融合算法,以更好地適應不同環(huán)境和作業(yè)場景,還需要深入研究。
5.2 UWB與其他傳感器的融合可能性探討
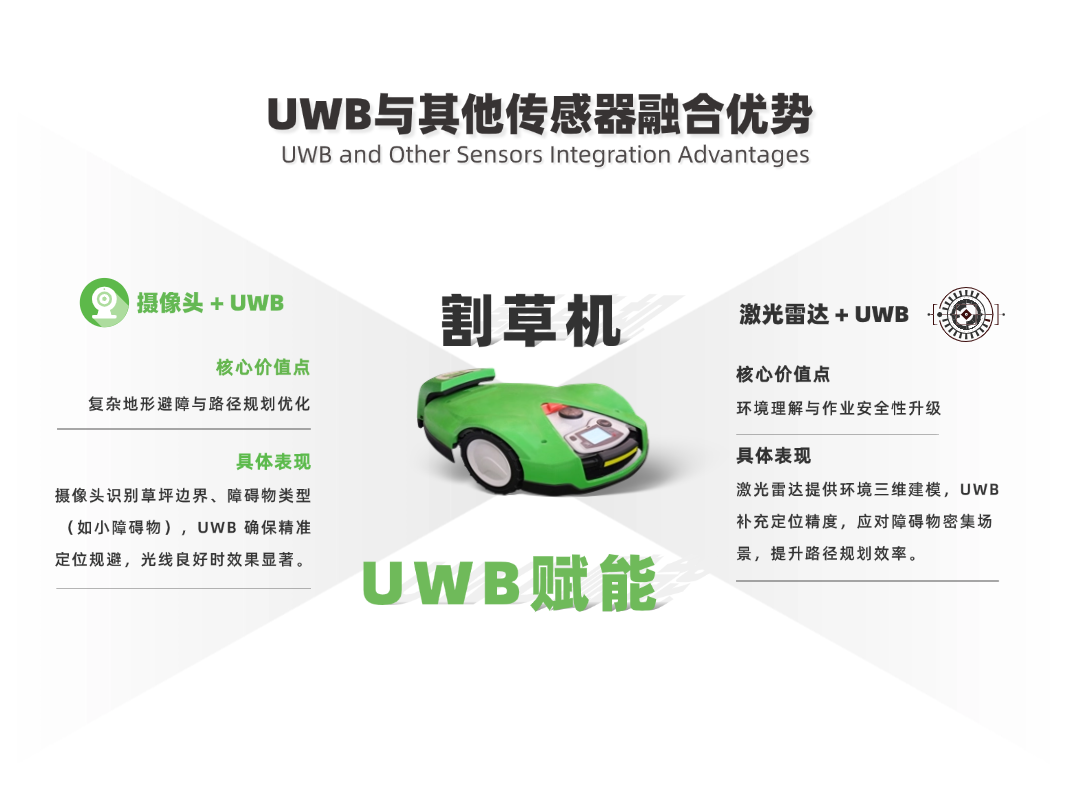
除了與IMU融合,UWB還可以與其他傳感器如激光雷達、攝像頭等進行融合。與激光雷達融合時,激光雷達可以提供高精度的周圍環(huán)境三維信息,UWB則提供精確的定位信息,兩者結(jié)合可以使割草機更全面地感知周圍環(huán)境,在復雜地形和障礙物較多的情況下,實現(xiàn)更精準的避障和路徑規(guī)劃。
與攝像頭融合,攝像頭可以通過圖像識別技術(shù)識別草坪邊界、障礙物類型等信息,UWB負責定位,兩者相互補充,能夠提高割草機對環(huán)境的理解和應對能力。例如,在光線良好的情況下,攝像頭可以準確識別草坪中的小障礙物,UWB確保割草機準確停在障礙物附近進行規(guī)避操作,從而提升割草機在復雜環(huán)境下的作業(yè)安全性和效率。但多種傳感器融合也帶來了數(shù)據(jù)融合算法復雜度增加、硬件成本上升以及系統(tǒng)穩(wěn)定性維護等一系列問題,需要進一步探索解決方案。
六、UWB 在割草機行業(yè)的未來發(fā)展前景展望
6.1 短期發(fā)展趨勢
在短期內(nèi),由于UWB技術(shù)自身的局限性以及市場上已有更成熟、更具性價比的定位方案(如“RTK + 視覺”),UWB在割草機行業(yè)的應用推廣可能會面臨一定困難。企業(yè)可能會更多地將UWB與其他技術(shù)進行小規(guī)模的融合試驗,探索其在特定場景下的應用潛力,如在一些地形特別復雜、對定位精度要求極高的高端割草機產(chǎn)品中,嘗試UWB 與其他傳感器的融合方案,以滿足特定客戶群體的需求。同時,隨著 UWB技術(shù)在其他領域(如智能手機、汽車等)的應用逐漸普及,相關硬件成本可能會有所下降,這也為UWB在割草機行業(yè)的潛在應用提供一定的成本優(yōu)化空間。
6.2 長期發(fā)展?jié)摿?/strong>
從長期來看,如果UWB技術(shù)能夠在信號遮擋、成本降低、部署便利性等方面取得突破,其在割草機行業(yè)仍具有較大的發(fā)展?jié)摿Α@纾粞邪l(fā)出能夠有效穿透遮擋物的UWB信號增強技術(shù),或者通過技術(shù)創(chuàng)新大幅降低多信號源硬件成本和部署難度,UWB有望在割草機定位領域占據(jù)更重要的地位。
此外,隨著智能家居、智能庭院概念的不斷發(fā)展,割草機作為智能庭院的重要組成部分,對其智能化、精準化作業(yè)的要求將不斷提高。UWB技術(shù)若能與未來更先進的傳感器技術(shù)、人工智能算法深度融合,實現(xiàn)更高效、智能的割草作業(yè),將有可能迎來市場應用的爆發(fā)期。同時,隨著全球環(huán)保意識的增強,電動智能割草機市場規(guī)模將不斷擴大,這也為UWB等先進技術(shù)在割草機行業(yè)的應用提供了更廣闊的市場空間。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
UWB技術(shù)
+關注
關注
3文章
138瀏覽量
12128 -
UWB測距
+關注
關注
0文章
21瀏覽量
7667 -
割草機器人
+關注
關注
0文章
45瀏覽量
1034
發(fā)布評論請先 登錄
出貨量增速超300%!割草機器人技術(shù)突破和產(chǎn)業(yè)鏈解析
禾賽科技2025年割草機器人3D激光雷達出貨量第一
智能割草機器人關鍵部件防水設計,融入微爾斯ePTFE防水透氣膜技術(shù)

從掃地機器人到割草機器人,中微半導芯片級方案賦能電機極限挑戰(zhàn)
移遠通信LG290P模組:以0.33W低功耗+2cm精度,破解割草機器人定位難題

移遠通信LG290P模組:以0.33W低功耗+2cm精度,破解割草機器人定位難題

高速CANFD收發(fā)器ASM1042在割草機器人輪轂電機通信系統(tǒng)中的適配性研究
解讀基于凌鷗創(chuàng)芯MCU的割草機器人刀盤控制方案
盤點割草機器人六大避障傳感器
廣和通純視覺技術(shù)在智能割草機器人領域的應用
技術(shù)創(chuàng)新+產(chǎn)業(yè)鏈優(yōu)勢!國產(chǎn)割草機器人走向海外
國產(chǎn)智能割草機器人走俏海外,飛凌RK3576核心板鑄就智慧引擎

智能割草機器人行走輪無感FOC解決方案

國內(nèi)割草機海外受歡迎 RK3588割草機器人應用解決方案
九號公司Segway Navimow X3割草機器人獲TüV萊茵"高效割草"Quality-mark認證




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論