 兆易創新GD32H7系列MCU適配Micro-ROS的完整技術指南
兆易創新GD32H7系列MCU適配Micro-ROS的完整技術指南

隨著具身智能技術爆發,機器人從工業場景向消費級、服務級領域快速滲透,小到家庭陪伴機器人,大到工業協作機器人,均對“邊緣控制精度”與“生態協同能力”提出更高要求。據行業數據顯示,一臺中型服務機器人需集成10-15個傳感器節點與8-12個執行器控制單元,而人形機器人的自由度關節更是突破20個,這類場景下,傳統“MCU+簡單控制程序”的模式已無法滿足多節點協同需求——需同時實現實時電機控制、傳感器數據預處理與云端/主機端數據交互,這也推動了“輕量化機器人操作系統(ROS)+高性能MCU”的技術組合成為行業主流。
作為ROS 2的輕量化分支,Micro-ROS憑借“資源適配性強”“生態兼容性高”“實時性優異”三大優勢,已成為嵌入式機器人領域的核心框架。其關鍵價值在于打破資源受限設備與ROS生態的壁壘:僅需幾十KB內存即可在MCU端實現完整ROS 2通信能力(包括主題發布/訂閱、服務調用、參數管理等核心功能),且能無縫對接Linux主機端的ROS 2節點。在機器人實時電機控制、智能傳感器節點、邊緣計算預處理等場景實現規模化應用,成為連接“邊緣控制層”與“云端算力層”的關鍵橋梁。
兆易創新GD32H7系列MCU,憑借Cortex-M7內核,高達600MHz主頻、1MB級SRAM(含512KB緊耦合內存)、多接口集成等硬件特性,完美匹配Micro-ROS的輕量化與實時性需求,成為國產MCU中適配Micro-ROS的優選方案。
本文將從開發板介紹、環境搭建、適配開發、測試驗證四個維度,提供GD32H7系列MCU適配Micro-ROS的完整技術指南。
GD32H7系列MCU適配Micro-ROS的工程代碼已在GitHub上開源,歡迎開發者下載使用。
Github倉庫鏈接:
https://github.com/GigaDeviceSemiconductor/GD32H7-micro_ROS
Micro-ROS技術特性與架構
Micro-ROS是專為資源受限嵌入式設備設計的ROS 2輕量級實現框架,其核心特性可概括為七點:
優化的客戶端API: 針對MCU資源特性優化,支持所有ROS 2核心概念(節點、話題、服務、參數等);
無縫生態集成: 可直接與Linux主機ROS 2節點通信,無需額外協議轉換;
輕量化中間件: 采用DDS-XRCE中間件,內存占用低至8KB,適配資源受限場景;
多RTOS支持: 兼容FreeRTOS、Zephyr、NuttX等主流實時操作系統,本文基于FreeRTOS開發;
寬松許可證: 基于Apache 2.0許可證,商用無限制;
活躍社區支持: 提供完善文檔、示例代碼與問題反饋渠道,生態持續迭代;
長期可維護性: 遵循ROS 2架構規范,確保與后續版本的兼容性。
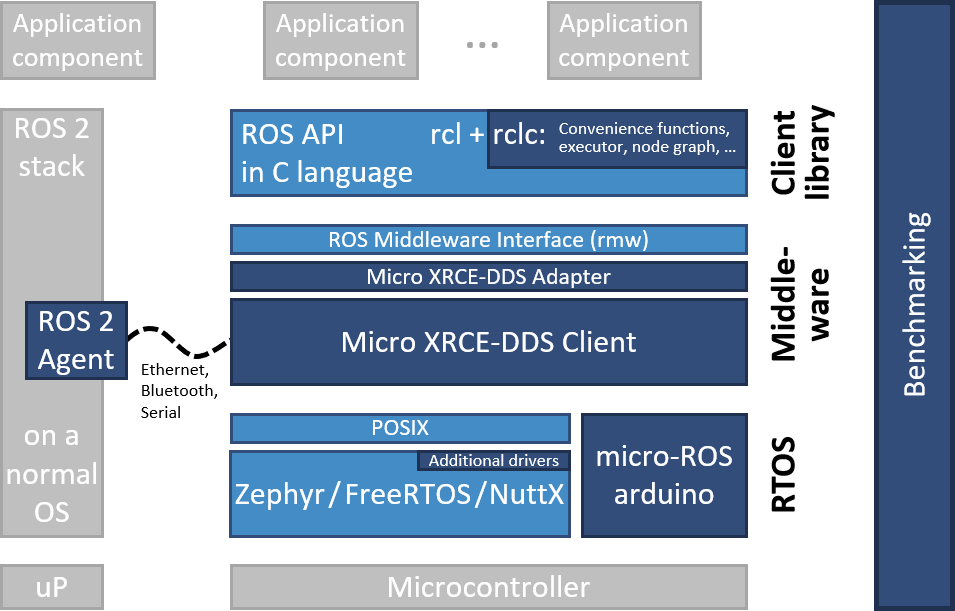
△micro-ROS的系統架構
(圖片來源:micro-ROS官方網站)
GD32H7開發板規格與接口定義
本文適配測試基于兩款GD32H7系列開發板:GD32H759I-EVAL與GD32H75EY-EVAL,兩者分別支持串口、USB、以太網與Micro-ROS Agent通信,核心規格與接口定義如下:
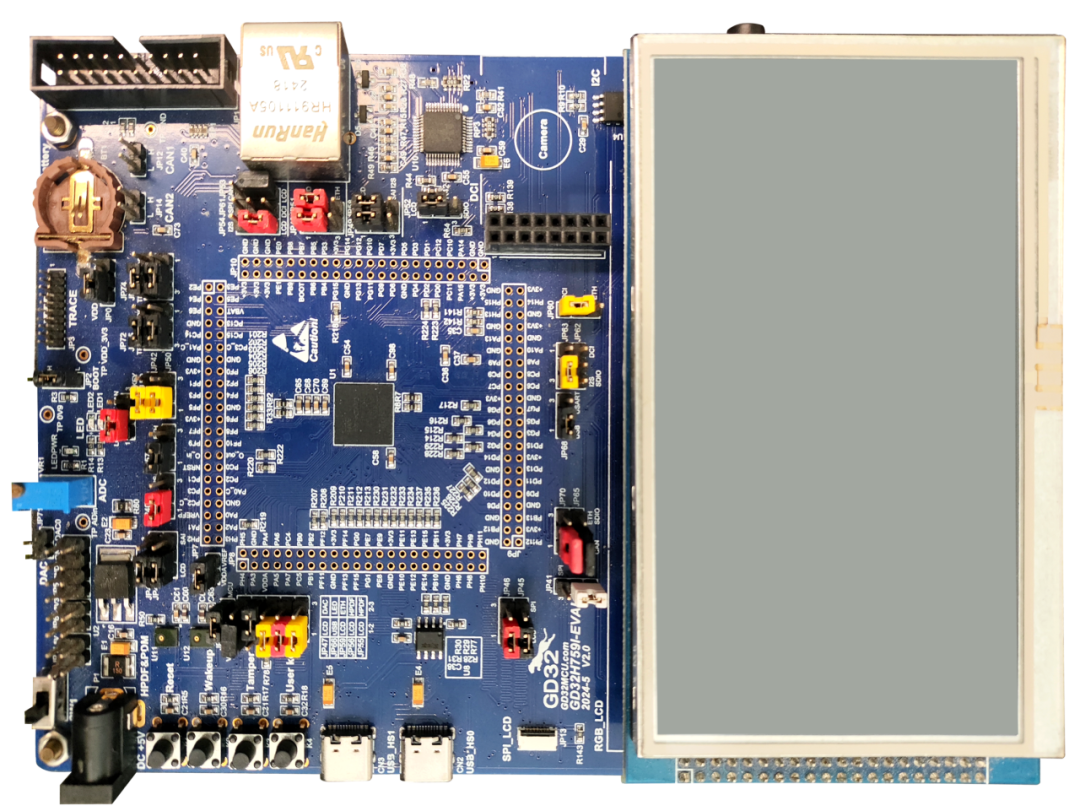
1GD32H759I-EVAL板
主控芯片:GD32H759IMK6(Cortex-M7內核,最高600MHz主頻);
供電方式:GD-Link Mini USB接口或DC-005連接器(5V);
核心外設:Ethernet網口、USB HS0接口、3路CAN-FD、SDRAM、SPI-LCD、USARTx(多串口)等;
Micro-ROS關鍵接口定義:
打印串口:USART0(引腳PA9、PA10);
串口通信(與Agent):USART2(引腳PB10、PB11);
以太網通信(與Agent):ETH0網口(需將JP48、JP51、JP57、JP59、JP60、JP70跳帽接至ETH);
USB通信(與Agent):USB_HS0接口。
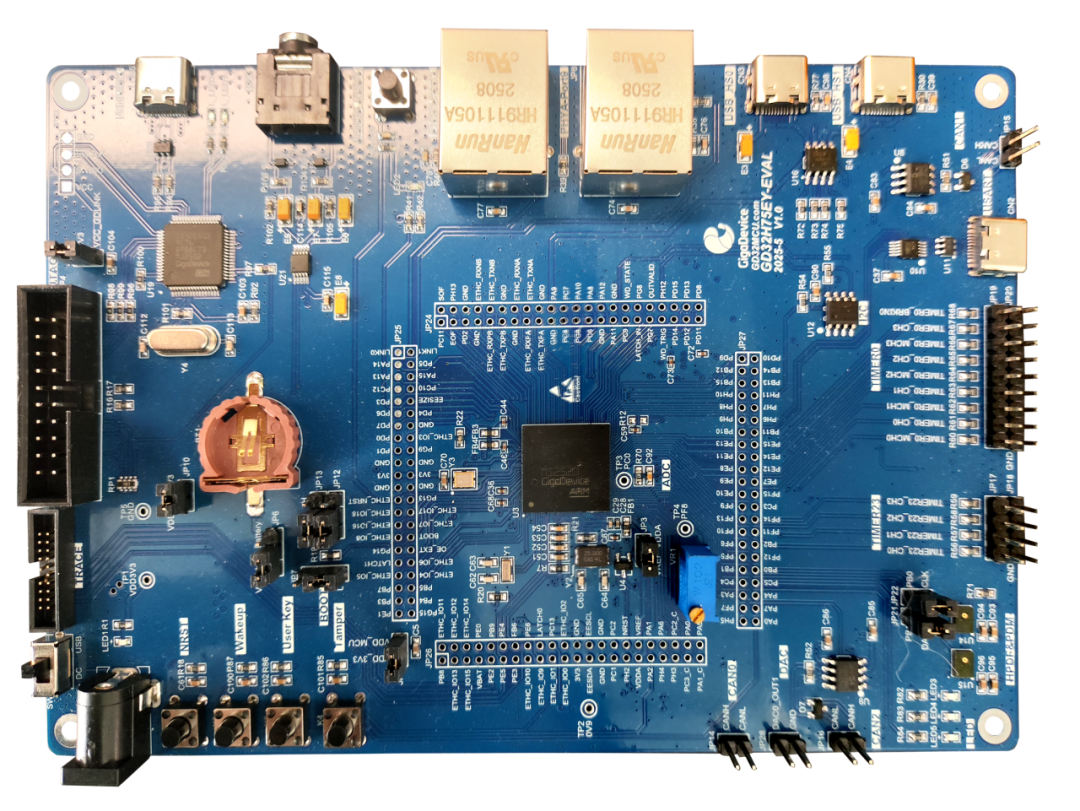
2GD32H75EY-EVAL板
主控芯片:GD32H75EYMJ6(Cortex-M7內核,最高600MHz主頻);
供電方式:GD-Link Mini USB接口或DC-005連接器(5V);
核心外設:USB HS0接口、2路CAN-FD、SPI、I2C、USARTx(多串口)等;
Micro-ROS關鍵接口定義:
打印串口:USART2(引腳PB10、PB11);
串口通信(與Agent):USART0(引腳PB6、PB7);
USB通信(與Agent):USB_HS0接口。
1ROS 2與Micro-ROS開發環境搭建(Host:Ubuntu 22.04)
1.1ROS 2Humble環境安裝
ROS 2是Micro-ROS的主機端核心依賴,本文選擇穩定版Humble,安裝步驟如下:
1.1.1 基礎依賴安裝
打開Ubuntu終端,執行以下命令安裝系統依賴:
sudoapt update &&sudoapt install -y curl gnupg2 lsb-release
1.1.2 環境變量與源配置
確保系統支持UTF-8編碼:
sudolocale-gen en_US en_US.UTF-8 sudoupdate-locale LC_ALL=en_US.UTF-8LANG=en_US.UTF-8 exportLANG=en_US.UTF-8
添加ROS 2 apt倉庫密鑰與源:
sudocurl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo"deb [arch=$(dpkg --print-architecture)signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu$(lsb_release -cs)main"|sudotee/etc/apt/sources.list.d/ros2.list > /dev/null
1.1.3 ROS 2軟件包安裝
更新倉庫緩存并安裝桌面版:
sudoapt update &&sudoapt upgrade -y sudoapt install -y ros-humble-desktop # 可選:安裝開發工具(編譯依賴、調試工具) sudoapt install -y ros-humble-ros-base python3-colcon-common-extensions python3-rosdep
配置環境變量(每次打開終端需執行,或添加至~/.bashrc):
source/opt/ros/humble/setup.bash
1.1.4 環境驗證(Talker-Listener測試)
終端1:運行發布節點(talker):
source/opt/ros/humble/setup.bash ros2 run demo_nodes_cpp talker
終端2:運行訂閱節點(listener):
source/opt/ros/humble/setup.bash ros2 run demo_nodes_cpp listener
若終端2能接收終端1發布的“Hello World”消息,則ROS 2環境安裝成功。
1.2Micro-ROS構建系統安裝
Micro-ROS依賴專屬工具鏈實現固件編譯與Agent通信,安裝步驟如下:
1.2.1 工具鏈下載與依賴安裝
加載ROS 2環境并創建Micro-ROS工作空間:
source/opt/ros/humble/setup.bash mkdir-p ~/micro_ros_ws/src &&cd~/micro_ros_ws gitclone-b humble https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup
安裝依賴(rosdep與pip):
sudo rosdep init && rosdep update rosdep install--from-pathssrc--ignore-src-y sudo apt install -ypython3-pip pip3 install -U colcon-common-extensions
1.2.2 工具鏈編譯與環境加載
編譯Micro-ROS工具鏈:
colcon build --packages-select micro_ros_setup sourceinstall/local_setup.bash
創建固件工作空間:
ros2run micro_ros_setup create_firmware_ws.sh host
執行后將在~/micro_ros_ws/firmware目錄下生成Micro-ROS工程結構,包含示例代碼與編譯腳本。
1.2.3 Micro-ROS環境驗證(Ubuntu主機端測試)
以“ping-pong”示例驗證環境(主機端模擬MCU節點):
編譯ping-pong固件:
cd~/micro_ros_ws/firmware colcon build --packages-select micro_ros_demos_rclc sourceinstall/local_setup.bash
終端1:運行Micro-ROS Agent(UDP模式):
ros2run micro_ros_agent micro_ros_agent udp4 --port8888
終端2:運行ping-pong節點:
source~/micro_ros_ws/firmware/install/local_setup.bash ros2 run micro_ros_demos_rclc ping_pong
終端3:訂閱ping話題驗證通信:
source/opt/ros/humble/setup.bash ros2 topicecho/ping
若終端3能接收ping消息,則Micro-ROS環境搭建成功。
2GD32H7系列MCU適配Micro-ROS開發
2.1核心適配邏輯:靜態庫集成
由于GD32H7基于FreeRTOS開發,Micro-ROS適配采用“靜態庫集成”方案:先在Ubuntu主機端編譯生成適配Cortex-M7內核的Micro-ROS靜態庫(含核心API、中間件、通信適配層),再將靜態庫與頭文件導入GD32 Embedded Builder工程,配合底層驅動(串口、USB、以太網)實現通信。
靜態庫編譯參考Micro-ROS官方教程(https://micro.ros.org/docs/tutorials/advanced/create_custom_static_library/),本文已提供預編譯完成的靜態庫(包含libmicroros.a及相關頭文件),直接導入工程即可使用。
2.2工程導入與編譯(基于GD32 Embedded Builder)
GD32 Embedded Builder是GD32系列MCU的專屬IDE,支持工程管理、編譯、下載,適配步驟如下:
2.2.1 工程結構與靜態庫導入
下載GD32H7 Micro-ROS工程包(含GD32H759I_Eval_FreeRTOS_MicroROS與 GD32H75E_MicroROS兩個工程);
打開GD32 Embedded Builder,導入目標工程(如 GD32H759I_Eval_FreeRTOS_MicroROS);
將Micro-ROS靜態庫(libmicroros.a)放入工程Lib目錄,頭文件放入Inc/microros目錄,并在IDE中配置庫路徑與頭文件路徑。
2.2.2 不同通信接口的工程編譯
GD32H759I-EVAL支持串口(中斷/DMA)、USB CDC、以太網UDP三種通信方式,
GD32H75EY-EVAL支持串口(中斷/DMA)、USB CDC兩種方式,編譯時需選擇對應目標:
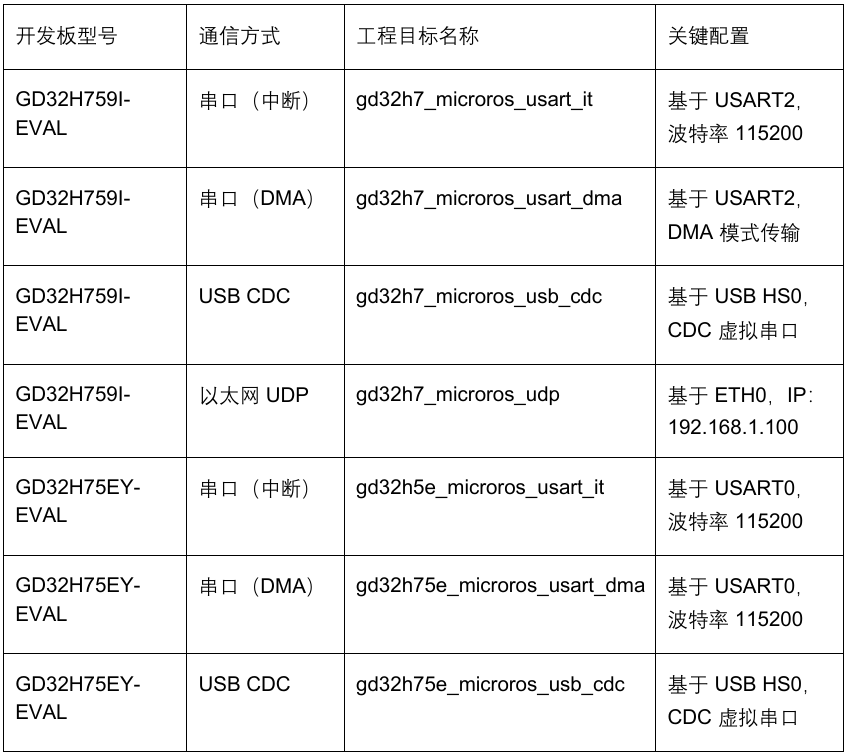
以GD32H759I-EVAL的串口(中斷)為例,編譯步驟:
右擊工程→Build Configuration→Set Active→選擇gd32h7_microros_usart_it;
點擊“Build”按鈕,編譯完成后生成.elf與.hex文件;
其他通信方式的編譯步驟類似,僅需切換目標工程即可。
3GD32H7 Micro-ROS功能測試
3.1測試準備
硬件:GD32H7開發板、GD-Link調試器、串口線(USB-TTL)、以太網網線(僅GD32H759I-EVAL)、12V電源;
軟件:Ubuntu 22.04(已裝ROS 2與Micro-ROS Agent)、串口調試助手(如SSCOM)。
3.2分接口測試步驟
3.2.1 串口通信測試(以GD32H759I-EVAL為例)
硬件連接:
打印串口:USART0(PA9→TX,PA10→RX)接USB-TTL,用于查看調試信息;
通信串口:USART2(PB10→TX,PB11→RX)接另一USB-TTL,連接Ubuntu主機。
Agent啟動(Ubuntu終端):
source/opt/ros/humble/setup.bash ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 115200
(注:/dev/ttyUSB0為Ubuntu識別的串口設備,可通過ls/dev/ttyUSB*查看)
固件下載:
在GD32 Embedded Builder中選擇gd32h7_microros_usart_it工程,點擊“Download”下載固件;
打開串口調試助手(波特率115200),可看到開發板打印的初始化信息。
功能驗證:
打開新Ubuntu終端,訂閱Micro-ROS節點發布的/gd32h7_microros_publisher話題:
source/opt/ros/humble/setup.bash ros2 topicecho/gd32h7_microros_publisher
若能接收32位整數數據,則串口通信測試成功。
3.2.2 USB CDC通信測試(以GD32H759I-EVAL為例)
硬件連接:
打印串口:USART0接USB-TTL(查看調試信息);
USB通信:開發板USB_HS0接口接Ubuntu主機。
Agent啟動(Ubuntu終端):
source/opt/ros/humble/setup.bash # 查看USB CDC設備(通常為/dev/ttyACM0) ls/dev/ttyACM* # 啟動Agent ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyACM0 -b 115200
-
mcu
+關注
關注
147文章
19027瀏覽量
400976 -
機器人
+關注
關注
213文章
31246瀏覽量
223101 -
開發板
+關注
關注
26文章
6346瀏覽量
119490 -
兆易創新
+關注
關注
24文章
721瀏覽量
83958
原文標題:GD32H7 Micro-ROS開發實戰:從零到一構建機器人應用
文章出處:【微信號:GD32MCU,微信公眾號:GD32MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何使用menuconfig添加配置micro-ros軟件包?
瑞薩將micro-ROS移植到RA MCU中
AN122 GD32H7系列MCU OSPI flash執行環境用戶指南

兆易創新GD32H7系列MCU助力海洋科技人才培養
兆易創新GD32H7系列MCU解鎖邊緣AI新玩法

兆易創新GD32H7系列MCU榮獲2025中國國際工業博覽會集成電路創新成果獎




 工商網監
工商網監
評論