") 正運(yùn)動磁驅(qū)多動子柔性產(chǎn)線解決方案
正運(yùn)動磁驅(qū)多動子柔性產(chǎn)線解決方案

磁驅(qū)輸送線作用原理是什么?
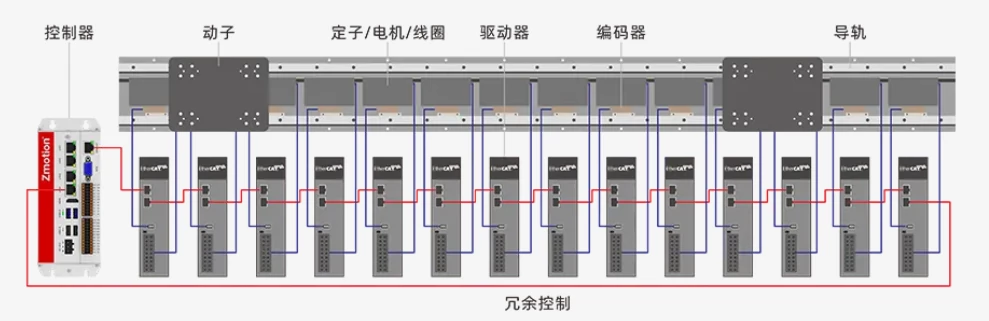
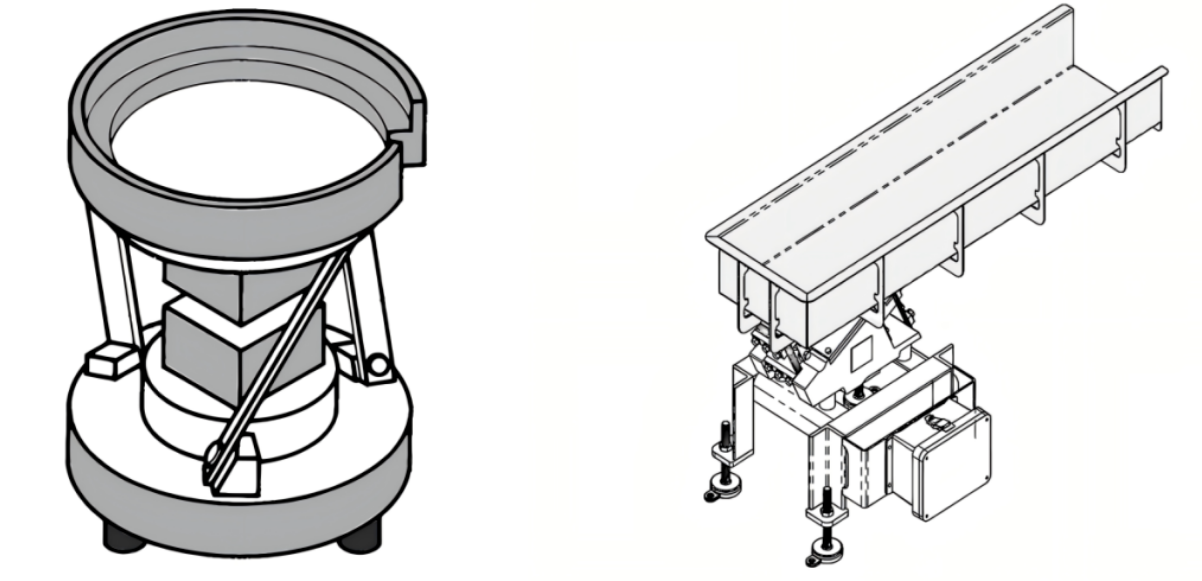
磁驅(qū)輸送線基于交變磁場與直線電機(jī)原理運(yùn)作,系統(tǒng)由定子和動子構(gòu)成。定子固定在輸送線軌道上,含有按特定規(guī)律排列的線圈繞組;動子承載物料,裝配永磁體。
電流通過定子線圈產(chǎn)生交變磁場,磁場與動子永磁體相互作用,根據(jù)洛倫茲力定律產(chǎn)生推動力,推動動子沿軌道直線運(yùn)動,從而實(shí)現(xiàn)物料輸送。
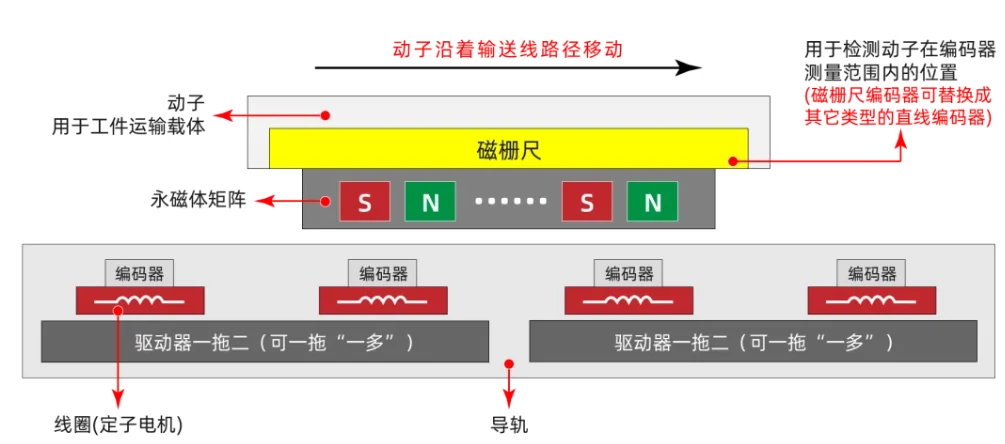
(磁驅(qū)輸送線的組件構(gòu)成框架示例圖)
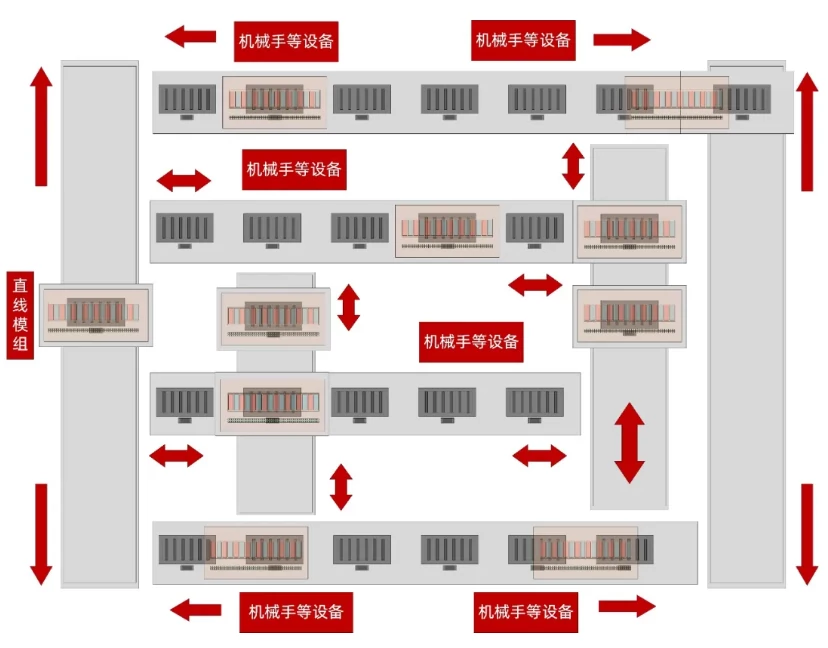
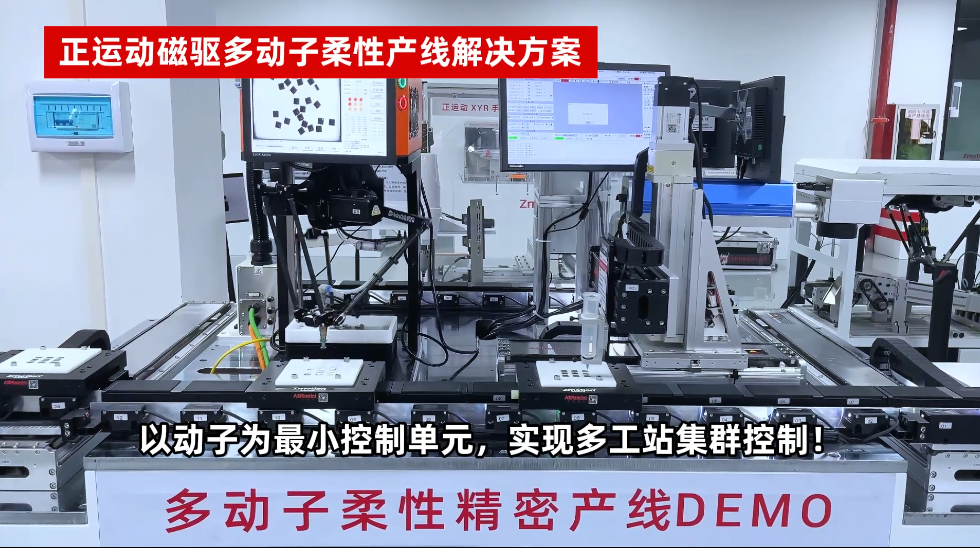
多動子:就像一條“磁力驅(qū)動的軌道”上跑著很多個“小車”(動子),每個小車都能獨(dú)立控制位置,加、減速和停止運(yùn)動,可進(jìn)行多輛小車在同一條軌道上按照編隊(duì)順序跑動。
(磁驅(qū)輸送線控制多動子示意圖)
磁驅(qū)輸送線市場應(yīng)用
隨著制造業(yè)向多品種、快交付發(fā)展,單機(jī)設(shè)備的自動化水平持續(xù)提升,但產(chǎn)線整體效率往往被“工位之間的傳輸與多個外部設(shè)備協(xié)同”所限制。
傳統(tǒng)滾輪、皮帶、鏈條等同步輸送存在剛性連接帶來的震動、打滑與維護(hù)頻繁等問題,且節(jié)拍容易被處理時間最長工位鎖定;擴(kuò)產(chǎn)常通過堆疊重復(fù)工位實(shí)現(xiàn),導(dǎo)致占地與運(yùn)營成本上升。
(傳統(tǒng)輸送系統(tǒng)同步控制示意圖)
為適應(yīng)高速、高精與高柔性的需求,磁驅(qū)輸送線逐步成為主流選擇。但在真實(shí)產(chǎn)線里,輸送只是起點(diǎn):它須與上下料、加工、檢測、裝配等工站實(shí)時聯(lián)動。
若磁驅(qū)輸送線系統(tǒng)單“跑得快”,并不能提升整線OEE。產(chǎn)線真正的難點(diǎn)在于“到位即加工、邊走邊檢測、異常分流”的閉環(huán)控制。因此,需要將運(yùn)動控制、視覺協(xié)同與安全可靠機(jī)制高度集成,形成面向多工站的一體化解決方案。

多工站同一坐標(biāo)系、同一閉環(huán)、多軸同步控制:在線定位/跟蹤/分流合流/加工一次到位
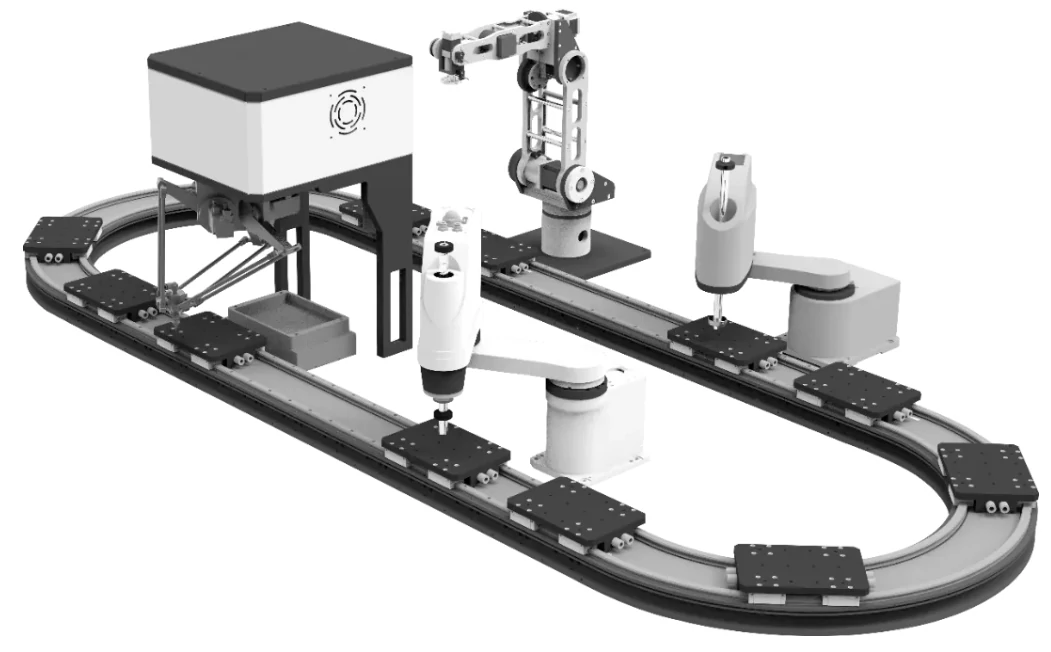
針對上述問題,正運(yùn)動基于VPLC712機(jī)器視覺運(yùn)動控制一體機(jī)開發(fā)了磁驅(qū)多動子柔性產(chǎn)線解決方案,以系統(tǒng)化、標(biāo)準(zhǔn)化組件自由靈活搭建多種磁驅(qū)多動子應(yīng)用方案。當(dāng)前方案采用磁驅(qū)多動子接駁線作為運(yùn)載平臺,集成多個工作站,運(yùn)送動子在各工位之間流轉(zhuǎn)。

▌多動子控制?成熟工藝包
正運(yùn)動解決方案將機(jī)械手上下料、視覺定位、AI缺陷檢測、點(diǎn)膠、激光打標(biāo)等常見工藝封裝為可組合工藝包,實(shí)現(xiàn)從單點(diǎn)設(shè)備控制到整線協(xié)同控制與統(tǒng)一調(diào)度。
用戶可通過參數(shù)化配置與切換配方,可快速適配不同規(guī)格、尺寸與類型的產(chǎn)品,并可根據(jù)訂單/計(jì)劃調(diào)整產(chǎn)能更方便,集成周期更短、適配性更強(qiáng)。
運(yùn)行視頻請點(diǎn)擊→正運(yùn)動磁驅(qū)多動子柔性解決方案設(shè)備運(yùn)行視頻
方案實(shí)現(xiàn)原理
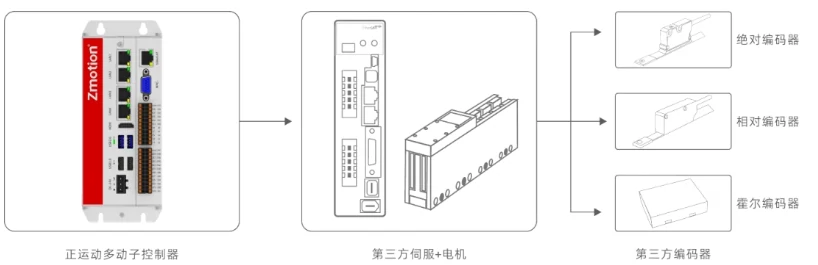
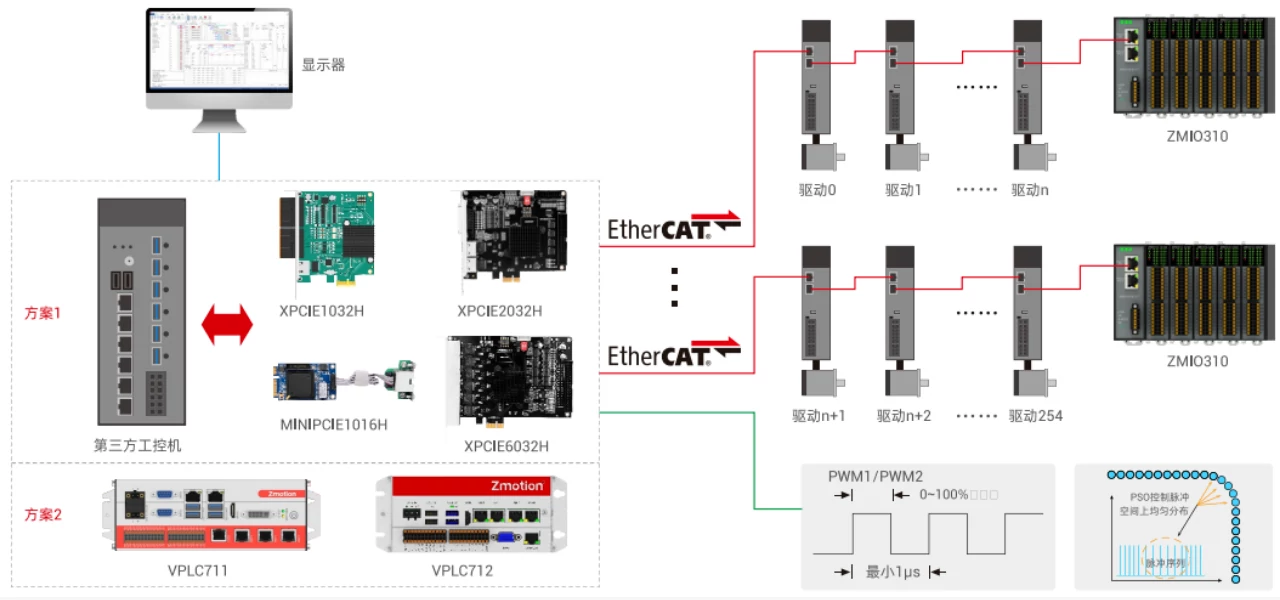
VPLC712作為磁驅(qū)多動子輸送線控制器,統(tǒng)一執(zhí)行多動子運(yùn)動控制,并與各工位設(shè)備進(jìn)行數(shù)據(jù)交互。多動子驅(qū)動用標(biāo)準(zhǔn)直線電機(jī)與標(biāo)準(zhǔn)編碼器反饋,控制器經(jīng)EtherCAT總線連接伺服驅(qū)動器,控制定子線圈電流形成行進(jìn)磁場,與動子永磁體矩陣作用產(chǎn)生推力,實(shí)現(xiàn)動子在接駁線、環(huán)形軌道及多軌道拓?fù)渲凶杂蛇\(yùn)行與精準(zhǔn)停靠。
方案同時還可控制脈沖伺服/步進(jìn)驅(qū)動裝置(如皮帶傳動裝置、搬運(yùn)系統(tǒng)等),減少硬件資源重復(fù)投入,使上下游工作站無縫集成,有效簡化工藝流程。
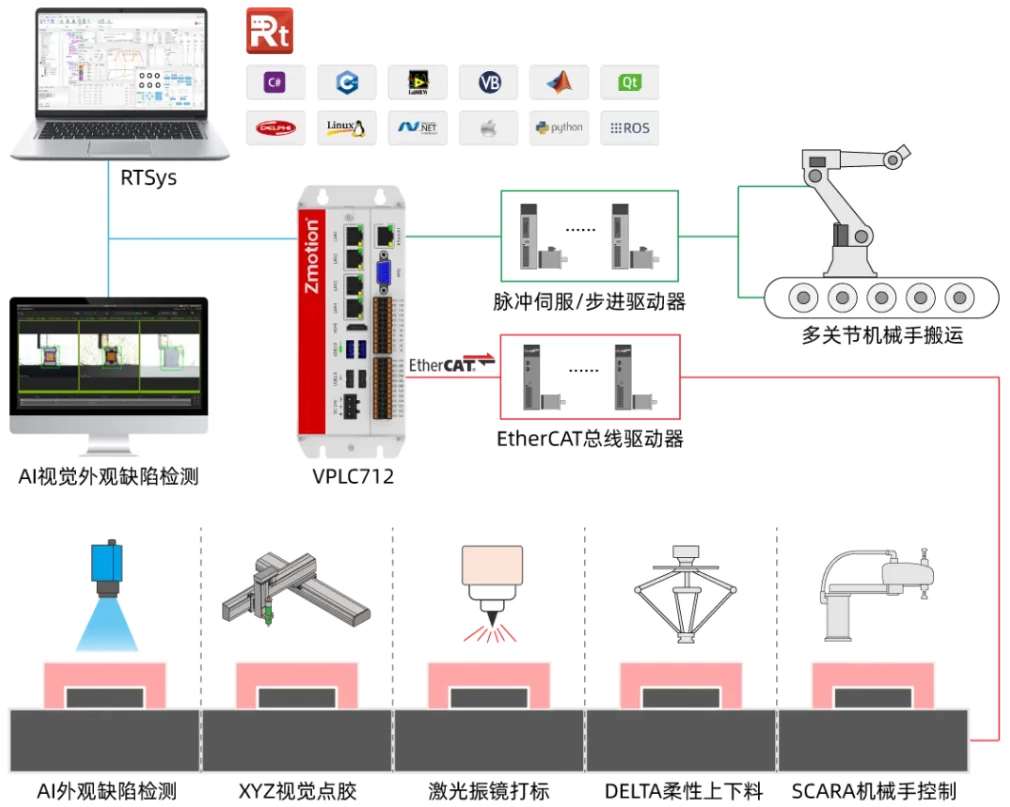
▲ 正運(yùn)動磁驅(qū)多動子柔性解決方案拓?fù)鋱D ▲
集成了控制磁驅(qū)多動子所需核心功能
豐富的運(yùn)動控制、IO控制、視覺、通訊功能,從同步定位到多工站集成控制。
采用標(biāo)準(zhǔn)EtherCAT接口,32軸冗余同步周期125us。
每個動子獨(dú)立控制,支持單獨(dú)或成組編隊(duì)實(shí)現(xiàn)同步/異步移動,并在分岔/合并點(diǎn)自由地切換軌道。
通過標(biāo)準(zhǔn)系統(tǒng)組件與功能實(shí)現(xiàn)自由擴(kuò)展,可滿足需快速創(chuàng)建簡單程序和裝配應(yīng)用。
用戶可擴(kuò)展自定義算法,通過開放式軟件架構(gòu)實(shí)現(xiàn)對附加外設(shè)設(shè)備模塊的控制。
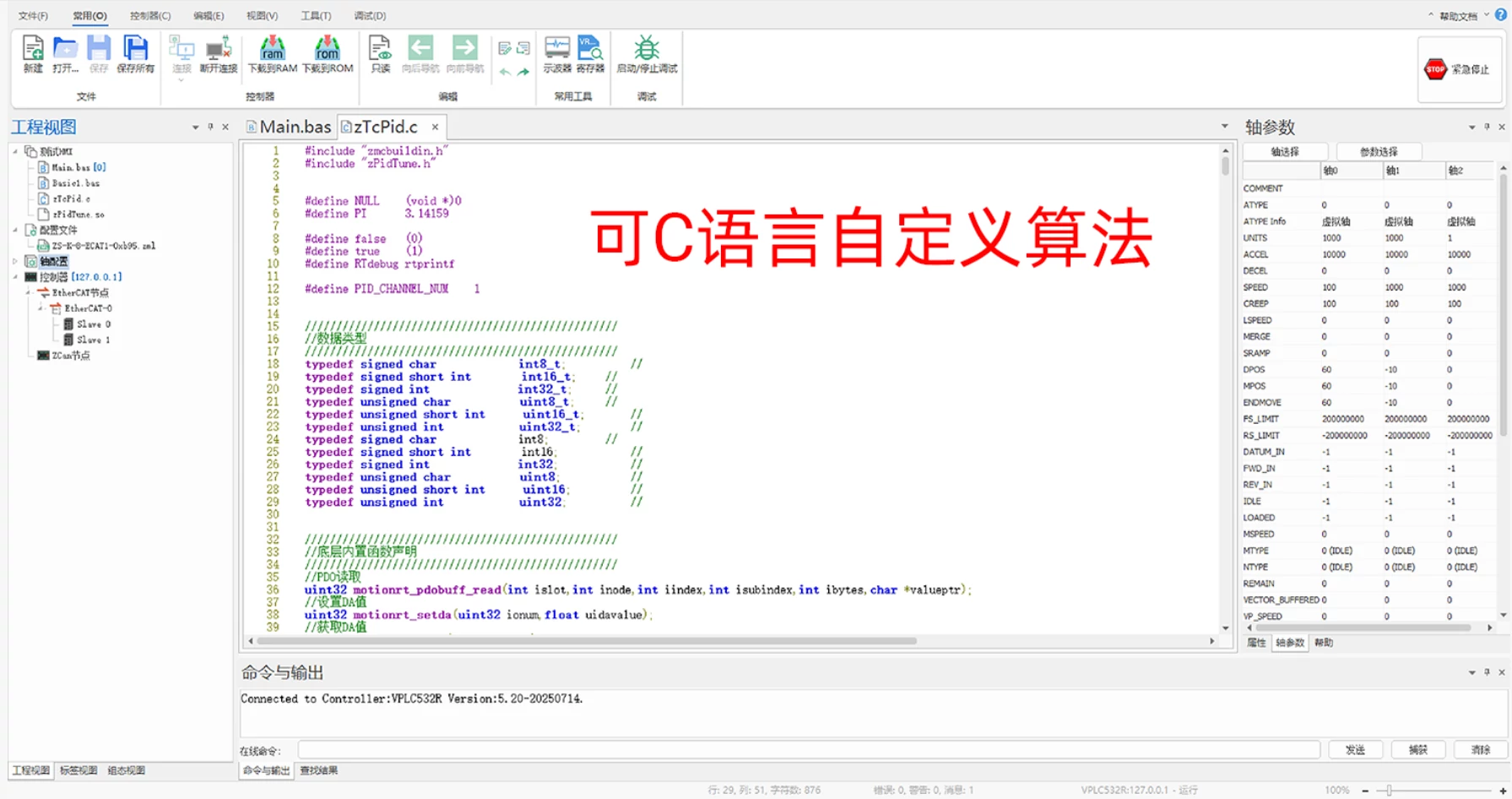
可通過RTSys IDE開發(fā)環(huán)境,進(jìn)行C語言編譯程序運(yùn)行。

兼容多種編碼器協(xié)議及類型。
具備故障追蹤與自主避碰監(jiān)測功能。

方案支持的磁驅(qū)線體布局形式
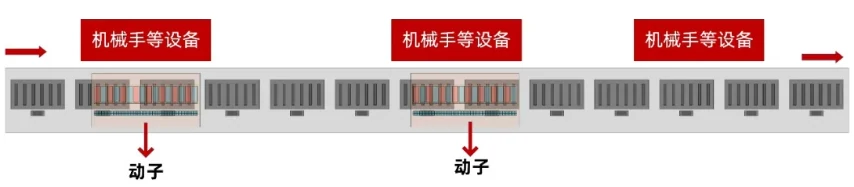
01.標(biāo)準(zhǔn)線性磁驅(qū)傳輸線
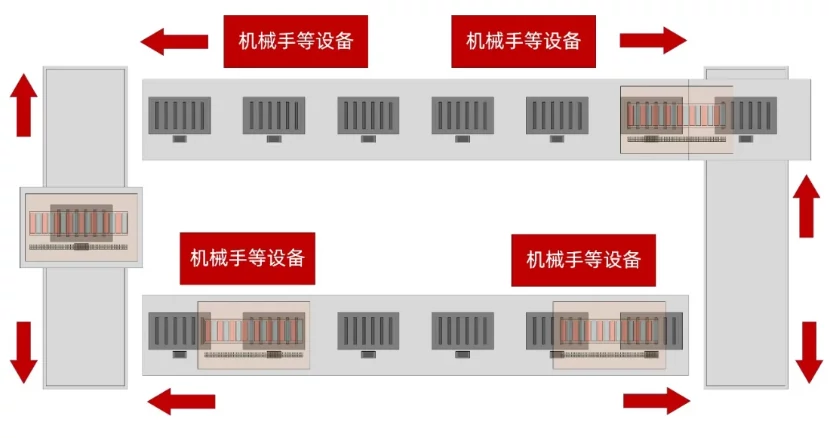
02.接駁型磁驅(qū)傳輸線
在配備多工位的生產(chǎn)系統(tǒng)中,磁驅(qū)輸送線通過接駁段使動子移動到其它磁驅(qū)線導(dǎo)軌上,連接支線工位(上下料、加工、檢測等)與主線,實(shí)現(xiàn)動子在主、支線間平滑切換和循環(huán)調(diào)度。
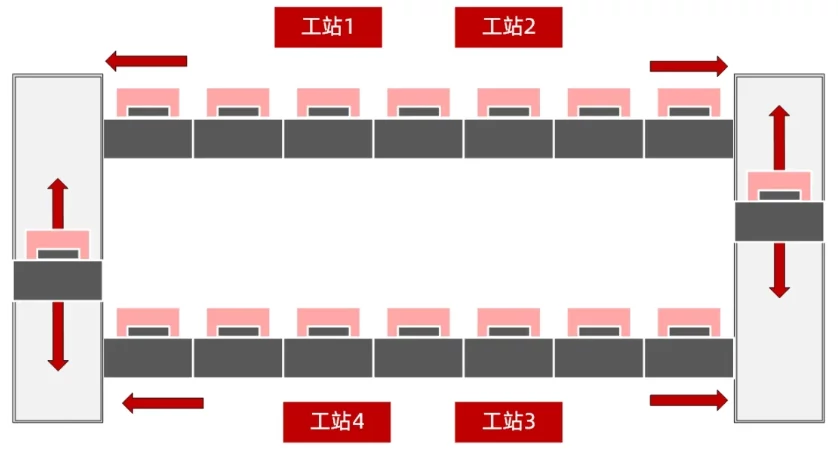
適用于多工位、節(jié)拍不均或需分流/回流的產(chǎn)線場景:動子按規(guī)定路徑進(jìn)入指定工位停靠定位后返回主線流轉(zhuǎn);同時支持單循環(huán)/雙循環(huán)等運(yùn)行模式,確保生產(chǎn)線周期時間一致且無等待時間,充分利用各工位最大循環(huán)速率,提升吞吐量,同時保持產(chǎn)線柔性與可擴(kuò)展性。
水平接駁
上下接駁通過升降裝置將電機(jī)在工藝段末端的動子垂直輸送至另一運(yùn)輸層級。
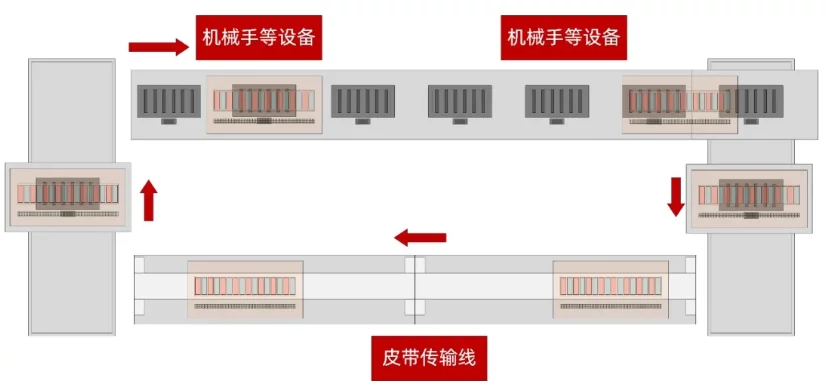
水平接駁+傳送帶回流
矩形多軌道輸送:多X多Y方式
注意:如有其它布局需求,如“圓弧段環(huán)形布局”等形式, 可聯(lián)系正運(yùn)動基于原有磁驅(qū)輸送系統(tǒng)上進(jìn)行驗(yàn)證測試并封裝。
方案磁驅(qū)多動子流程
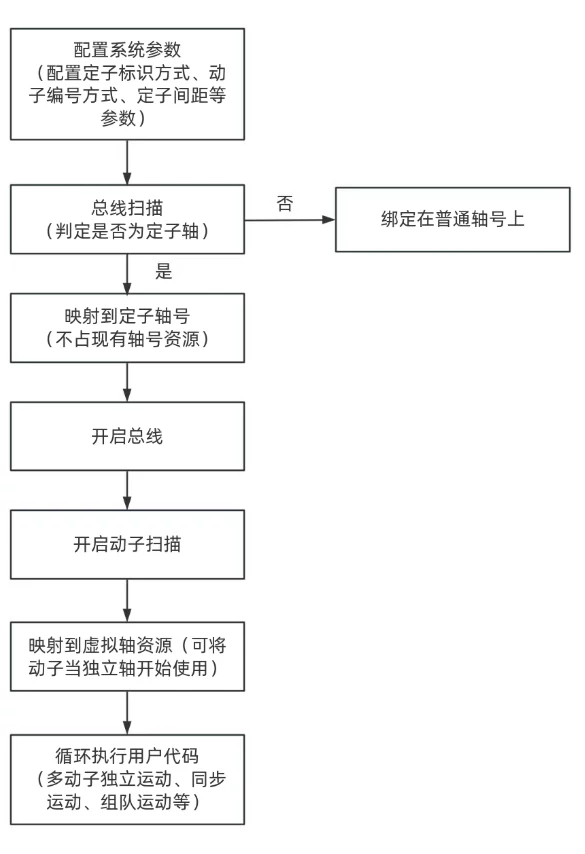
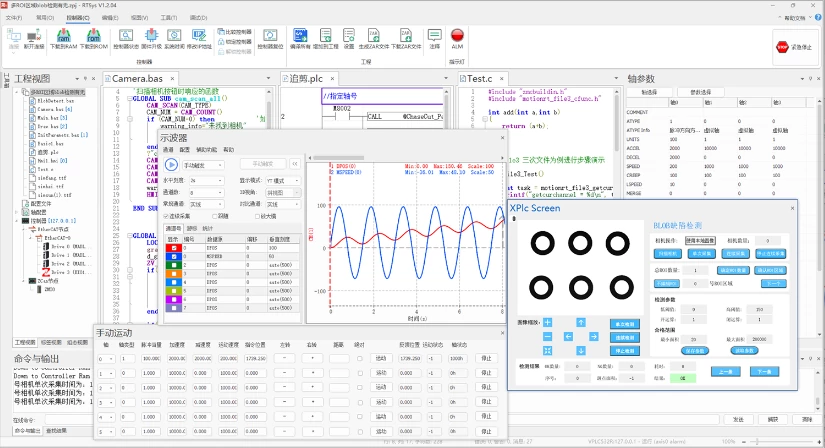
當(dāng)前軟件方案采用正運(yùn)動RTSys軟件為基礎(chǔ),MotionRT750實(shí)時內(nèi)核為EtherCAT總線核心,通過導(dǎo)入的磁驅(qū)多動子函數(shù)庫,實(shí)現(xiàn)磁驅(qū)多動子的各種定位運(yùn)動控制與接駁過渡和防碰撞算法控制。
RTSys軟件的API接口可以支持客戶使用各種環(huán)境與上位機(jī)語言進(jìn)行視覺與運(yùn)動控制項(xiàng)目代碼的編程、測試、調(diào)試與配置,實(shí)現(xiàn)自定義上位機(jī)和顯示界面、操控界面的開發(fā)。
一、機(jī)器視覺運(yùn)動控制一體機(jī)VPLC7系列

可選4-64軸運(yùn)動控制(脈沖+EtherCAT總線),EtherCAT最小通訊周期250us;
內(nèi)置強(qiáng)實(shí)時運(yùn)動控制內(nèi)核MotionRT750,支持第三方視覺軟件;
板載20路通用輸入(其中VPLC711的10路和VPLC712的8路為高速輸入),20路高速輸出;
基于x86架構(gòu)的EtherCAT總線視覺運(yùn)動控制器,支持脫機(jī)運(yùn)行,內(nèi)置豐富的視覺和運(yùn)動控制功能,大幅簡化配置流程;
支持EtherCAT冗余功能,解決單點(diǎn)故障停機(jī),自動診斷并持續(xù)運(yùn)行,增強(qiáng)系統(tǒng)可靠性,簡化維護(hù)工作;
提供一體化開放式IPC形態(tài)的實(shí)時軟控制器/軟PLC集成的視覺+運(yùn)動控制解決方案。
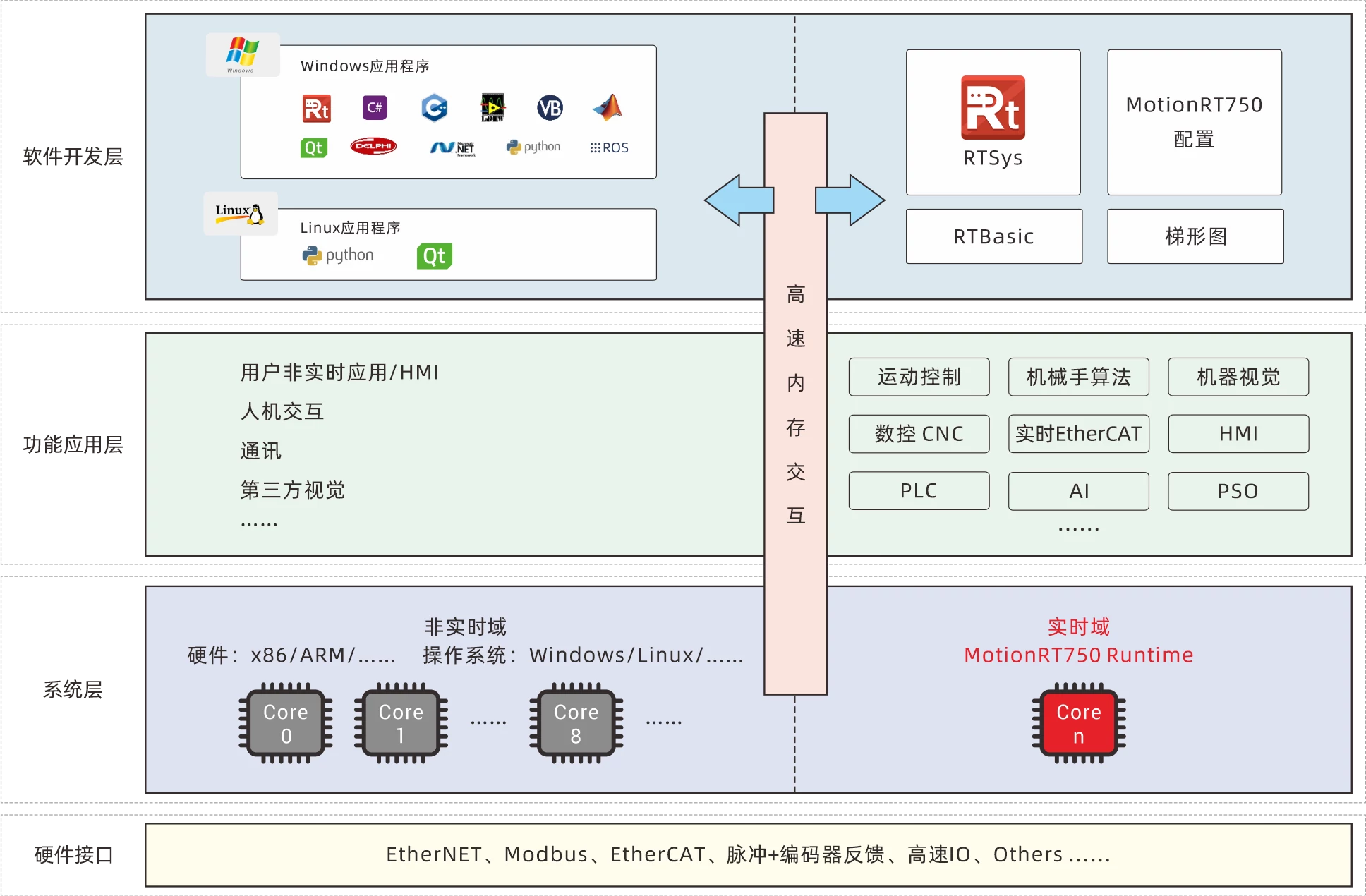
二、強(qiáng)實(shí)時運(yùn)動控制內(nèi)核 - MotionRT750
x86架構(gòu)Windows/Linux系統(tǒng)下獨(dú)占CPU內(nèi)核的運(yùn)動控制實(shí)時內(nèi)核。
支持多達(dá)254軸的高精度運(yùn)動控制,控制周期可低至125us,顯著提升設(shè)備性能,助力產(chǎn)能提升至少20%。
單條指令的交互時間為1-3us,相較于傳統(tǒng)的PCI/PCIe、網(wǎng)口等通訊方式,速度提升了10-100倍以上。

搭載環(huán)形冗余架構(gòu),確保非故障從站持續(xù)保持正常EtherCAT通信,可顯著提升系統(tǒng)可靠性與運(yùn)行穩(wěn)定性。可有效杜絕EtherCAT通訊故障導(dǎo)致的產(chǎn)能損失。
當(dāng)Windows因病毒入侵、硬件異常插拔或驅(qū)動沖突導(dǎo)致系統(tǒng)崩潰時,運(yùn)動控制實(shí)時內(nèi)核 MotionRT750仍可持續(xù)運(yùn)行,且急停功能仍然保持有效,提供充分響應(yīng)時間進(jìn)行事故處置,顯著提升工業(yè)控制安全性與可靠性。

正運(yùn)動技術(shù)專注于運(yùn)動控制技術(shù)研究和通用運(yùn)動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運(yùn)動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運(yùn)動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運(yùn)動控制核心技術(shù)和實(shí)時工控軟件平臺技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動控制卡_運(yùn)動控制器_EtherCAT運(yùn)動控制卡_EtherCAT控制器_運(yùn)動控制系統(tǒng)_視覺控制器__運(yùn)動控制PLC_運(yùn)動控制_機(jī)器人控制器_視覺定位_XPCIe/XPCI系列運(yùn)動控制卡等等。
審核編輯 黃宇
-
運(yùn)動控制器
+關(guān)注
關(guān)注
2文章
487瀏覽量
26067 -
機(jī)器視覺
+關(guān)注
關(guān)注
165文章
4809瀏覽量
126273 -
直線電機(jī)
+關(guān)注
關(guān)注
10文章
858瀏覽量
25285 -
運(yùn)動控制
+關(guān)注
關(guān)注
5文章
829瀏覽量
34612 -
運(yùn)動控制卡
+關(guān)注
關(guān)注
7文章
132瀏覽量
16112
發(fā)布評論請先 登錄
在線測徑儀|紙管外徑無損精準(zhǔn)測量,產(chǎn)線品控高效升級
正運(yùn)動磁驅(qū)多動子柔性產(chǎn)線解決方案#正運(yùn)動技術(shù)#運(yùn)動控制器#機(jī)器視覺運(yùn)動控制一體機(jī)#運(yùn)動控制卡#磁驅(qū)#多動子
匯川技術(shù)榮膺CIAA 2025年度運(yùn)動控制領(lǐng)域最具影響力品牌
多種類幾何尺寸集成智能儀器定制 一站式解決產(chǎn)線多維度測量需求
匯川技術(shù)推出InoTS系列磁驅(qū)智控柔性系統(tǒng)
破壁“巴別塔”:DeviceNET轉(zhuǎn)CANopen網(wǎng)關(guān)重塑汽車產(chǎn)線百萬秒價值

慧鼎科技首條磁流變減振器與磁流變液產(chǎn)線落成

冷凍食品產(chǎn)線物聯(lián)網(wǎng)監(jiān)控系統(tǒng):基于 PLC 數(shù)據(jù)采集的溫度實(shí)時調(diào)控與能耗優(yōu)化方案
涂料產(chǎn)線PLC數(shù)據(jù)采集解決方案

破解醫(yī)療器械多BOM困局:APS生產(chǎn)計(jì)劃排產(chǎn)軟件解決方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論