 知行科技如何用小算力躋身第一梯隊
知行科技如何用小算力躋身第一梯隊

“那輛測試車哐哐地撞擊圍欄。天亮就是客戶演示,沒辦法,團隊集體留在現場通宵解決。”
當時當刻,量產Deadline、模型算法高上限低下限的特性,還有全行業追高階、追標配的焦灼氣氛都沉沉地壓在知行科技泊車團隊每個同學心頭,天還沒亮,每個人都在咬牙堅持。
2025年,知行科技成功量產業內首個8TOPS BEV感知泊車解決方案,性能表現對齊業內頭部,成為平臺化高性能泊車輔助拳頭產品,并在年內獲多個主機廠、多個車型項目定點。
但知行科技泊車團隊的每個人都記著那個承載所有“量產痛苦”的不眠之夜。沒有一勞永逸的銀子彈,只有日拱一卒的笨功夫——量產,是天亮之前一直堅持的故事。
01歡迎來到新周期
計劃沒有變化快。有技術代差的量產產品,還值得繼續做下去嗎?
是規則算法還是模型算法,是燃油車還新能源,是純電、插混還是增程式?電動智能化技術革命一舉推翻了汽車產業四年中期改款,八年整車換代的固有周期。層出不窮的新技術不僅帶來突破,也意味著痛苦的關鍵選擇:
選擇新方向,意味著選擇不確定性;
放棄舊體系,意味著放棄前期成本和當前優勢。
這是2024年初知行科技管理層要面臨的課題。作為小算力泊車的領跑企業,知行科技剛交付一款泊車產品,但同期市場上有了新的“Benchmark”:
頭部玩家在開城大戰的同時“卷”起了泊車——大算力+強算法,快速將泊車輔助的功能體驗從“能用”拉向“好用”。
此時,盡管已量產的感知和計算硬件方案對比頭部玩家差距極大,但客戶和知行科技都不想在泊車新賽事中落后于人。很快,知行科技管理層做出決策:放棄具有優勢的成熟CNN算法,直接在8TOPS計算平臺上部署BEV(鳥瞰圖)感知方案提升系統性能上限,并通過十萬量級的規模市場檢驗。
“選擇在已交付項目上部署BEV是要勇氣的,”全程參與項目的感知模塊系統工程師朝河說起14個月前,仍有些“心有余悸”:“當時我個人是非常焦慮的。這么小的算力上去部署BEV是否可行?我們的軟件開發工具包(TSDK)能否支持在售項目規模所需的穩定性?8TOPS芯片本身沒有適用于BEV的深度學習框架工具,所有的坑只能我們自己趟。”
02BEV感知,在8TOPS上做取舍
BEV范式本身具有“多傳感器數據并行處理、大尺度BEV空間卷積、多任務解碼頭”的特點,對計算和內存資源高需求。在決策當時,知行科技剛完成0到1的自研BEV模型架構搭建,要成為業內首個部署在8TOPS小算力芯片上的BEV并服務量產項目,既要有技術突破,還要做好資源的取舍。
為切換到8TOPS平臺,知行科技感知團隊先將模型調整為"三合一"架構,由一個模型輸出占據柵格(OCC)、障礙物檢測(OD)、車位檢測(PSD)的感知結果,從架構層節省計算和存儲資源;之后,針對泊車任務特性對模型進行場景化裁剪壓縮。
同樣是BEV感知,行車功能要“看得遠”,泊車場景要“看得準”,近處障礙物的漏檢錯檢都會影響泊車功能表現。通常,業內通過增加BEV grid網格密度,讓模型“看”得更清楚。但只有8TOPS,如何負擔更高網格密度的計算需求?
為給神經網絡提供“高清”BEV grid,感知模型工程師開心四處找人“聊天”:
與后端項目聊,“功能當然希望什么都要,但有限資源下,我必須去聊清楚他們的真需求”;
與前端數據聊,“我和超哥天天聊,哪些需求是能用數據實現的,哪些又是必須由模型來解決的。”
穿透需求后,感知團隊重新為模型劃重點,不再追求“什么都有”,而是基于下游需求,提供“應有盡有”的感知結果。
開心并不只做減法。
為進一步強化近處障礙物的感知精度,團隊在感知模型中加入變分辨率模塊——通過“變焦”動態調整遠近障礙物的OCC格柵輸出精度,大幅提升近處格柵分辨率。但要找到合適的變分辨率范式,需要大量驗證過程。在此期間,團隊通過設計多種小量實驗,利用少量時間和訓練資源成功完成新模塊和整體模型的功能驗證。
“必須解的問題,再難、再增加資源也要實現,著力實現高優的需求。”這是開心的取舍之道。
03全量A星,規控做加法
要對標頭部玩家的泊車性能,僅增強感知還不夠,“要上全量混合A星時,我心里是打鼓的,畢竟很大。”負責下游規控算法的錦羽在項目之初同樣不安。
全量混合A星參數量大、邏輯過濾多,能夠基于更多要素在更大空間內求解,實現全場景快速、絲滑泊入。但“全量”也意味著更大的計算、存儲和通 信資源需求。
為在小算力平臺上部署全量A星,錦羽帶領團隊進行三個月的技術攻關:進行規劃時,休眠部分無關節點讓出更多片上資源;采用針對專門場景的規劃器,“術業專攻”,縮短規劃時間;開發動態規劃和碰撞算法,并引入傳統幾何算法,提升泊入效率和對極限場景的應對能力。
“辦法總比困難多,但把算法跑起來只是開始。”在硬件資源限定的“螺絲殼”里做出水陸齊全的道場后,錦羽團隊還需要不斷提升“道場”的運行效率。
全量A星跑起來后,規劃團隊立刻著手建立針對規劃模塊的仿真數據庫,同時在測試車內部署團隊開發的數據解析工具,錄制每個問題案例數據,形成“錯題集”。
新版本的規劃模塊在基礎數據庫和“錯題集”中進行單獨測試,實現本地調參和邏輯優化。
這不僅顯著降低了整體泊車算法的迭代成本,也讓錦羽團隊能夠更從容地增加針對不同場景的規劃器,高效解決復雜場景問題。
“現在,我們規劃算法占用的loading比較小,適合輕量化的控制,應用場景廣泛,平地坡道、磚草水泥,魯棒性和適應性很好。”經過十多個月的鏖戰,之前讓錦羽擔心的混合A星,成了泊車團隊趁手的“刀”。
04日供一卒,數據煉金
“拼盡全力交付第一版OTA版后,在我看來是個工程奇跡。但客戶看到的是BEV上線后,終端客訴增多。”時隔一年,朝河言辭間仍有壓力,但也有驕傲, “當時壓力非常大,還好我們的團隊凝聚力是在上升的,大家都在堅持,靜下心,把之前的規劃一步一步地做完。”
先突破的是規劃能力,全量A星上線后,泊車能力直線躍升,窄通道、窄車位、死角車位都能停,用戶端開始傳來正向反饋,團隊也開始看到希望。
但要讓“能用”變“好用”,還得靠高質量數據從根本上提升模型性能。
目前,量產輔助駕駛系統仍是基于模仿學習的預訓練模型,其即要求數據規模,以盡可能覆蓋現實場景;更要求數據質量,否則泥沙俱下、魚龍混雜的“教材”會嚴重影響模型表現。
事實上,高質量數據是輔助駕駛開發最“燒錢”的部分——采集、篩選、標注、訓練、評測、反饋的全鏈路數據閉環成本不菲,但每個環節,甚至環節間的銜接都充滿了未知陷阱,以直接或間接的方式影響最終的模型表現。
為確保數據質量,知行科技從源頭開始放棄低成本的第三方數采車,搭建起內部真值數據采集系統,攝像頭、激光雷達、定位模塊及車身信號等核心傳感器精度更高;重新開發的動態補償和時間同步方案保證了多模態、多數量傳感器的高精度空間同步,和毫秒級時間同步,自研的自動化工具鏈可實現“一鍵采集”,只需一人即可完成操作。
有高質量的原數據還不夠。開發過程中,團隊遭遇激光點云雜點疊幀后導致的OCC柵格“假”凸出,對路沿、墻壁等“橫平豎直”障礙物的感知準確性造成很大影響。對此,團隊一方面通過技術手段將雜點進行結構化處理,同時看數據找規律,尋找能夠消除傳感器標定誤差的正確參數。
“基礎數據庫有200萬幀,感知的同學差不多有一半時間是在看數據分布,數據表現"。在開心看來量產就是一個問題接一個問題的日拱一卒。
有時,“錯誤”甚至不在數據本身。BEV模型裁剪部署后,泊車系統的空間車位釋放率發生明顯下降。團隊通過大量數據和模型分析發現,是車輛yaw角和立柱這兩個看似獨立的感知目標,基于傳統規則標注后數據二義性過大,進而引發模型學習冗余,性能下降。大量試驗驗證后,團隊找到了適用的標注方法,兩者誤差減少90%,空間車位釋放率和邊角車位泊入成功率得到大幅提升。
“但單項誤差減小在系統層面不會立刻帶來性能提升。”開心的量產過程是一次次考試:“一周一版,每周末都是‘期末考試’。每發一次版我們就把數據、評測、訓練過程、代碼改動都總結一遍,然后看哪里可能存在問題,繼續改。”
數據負責人超哥和開心坐前后排,“當時的要求非常高,感知和我們(數據)一起去摳,對模型訓練來說,哪些是有價值的,哪些是無價值甚至產生干擾的。”
精細調整重建底圖的標定參數;對齊點云圖像曝光時間,彌補固有誤差對于標注精度的影響;將PSD標注方案進行三次升級……做統計、找規律、做驗證,知行科技模型和數據團隊一層層地摳、一遍遍試,尋找到最合理、最適用的數據生產方式,將改變落到實處。
日拱一卒無有盡,功不唐捐終入海。目前,知行科技每周能生產10萬PSD和7萬OCC數據,數據質量甚至得到了友商認可。
“我們試過去外部尋找高質量數據,但最終發現同樣成本下,我們自己標的數據質量最高,又能保證通過率。”超哥在一年之后,終于站在了階段性節點上:“又快又好。”
05背靠背,安全沖突的量產開發
“經此一役,我們成為一個真正的整體。”
做出此番感慨的朝河是知行科技“老人”,但開心、錦羽、超哥在項目之初都是剛進公司的“新人”,各自技術、體系,乃至企業文化背景都大不相同。
人員流動在高速發展的科技行業極為常見,但對量產落地卻是不小的挑戰。在趟坑過坎的量產過程中,無人發言的會議,沒有反對意見的討論,往往是項目延期的開端,新隊友則可能進一步強化“沉默分歧”帶來的風險。
“量產過程中也有很多爭執和不同意見,但大家都能暢所欲言,最終以項目為導向,客戶第一為導向來解決問題。”作為系統和半個項目經理,朝河見證了許多次沖突。“我們在多部門融合的開放環境中攻堅,大家更多還是從自身責任心、求知欲出發去深入探討問題。”
多部門融合,各環節都主動承擔分外的工作。項目、系統、質量承擔了客戶大部分怒火;模型組和數據組一道找數據問題,做數據處理;后處理、規控在感知性能爬坡階段,兢兢業業為上游兜底,在本模塊修正;匹配在日復一日、風吹日曬的測試外,還會盡心盡力分析感知規控問題,提出自己的建議。
數采車標定方案的修改,圖像輸入方式的變化,模型優化維度的調整……在安全溝通的氛圍內,團隊一次次迎接沖突,穿越沖突。
“泊車輔助是系統性工程,從最開始的傳感器到最后的執行器,誤差在這個復雜系統中是逐漸累積的,很難憑單一模塊去獨立消除誤差。”開心總結道:“堅持主動背靠背的氛圍,每一個環節大家都愿意去多做一些,保持共同的目標并且包容。這是技術方案外,我們能把這個泊車項目做到領先水平真正的原因。”
至2025年下半年,之前只“保垂直”的知行科技8TOPS泊車產品,垂直泊入僅需20秒,各種老司機也不愿停的車位也能自如泊入,穩定應對,不僅能停,而且停得好 。
不依賴天才個人的頓悟,而是靠系統的組織能力,讓無數小創新相互疊加,形成自我加強的結構性進步和強大韌性。這是技術方案以外,知行科技日拱一卒,以小博大的量產秘訣。
-
汽車產業
+關注
關注
1文章
355瀏覽量
13321 -
算力
+關注
關注
2文章
1528瀏覽量
16740 -
知行科技
+關注
關注
1文章
84瀏覽量
4112
原文標題:天亮之前無人退場 | 知行科技如何用小算力“泊入”第一梯隊
文章出處:【微信號:gh_dd1765c34afb,微信公眾號:知行科技iMotion】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
地平線HSD賦能iCAR V27:超強算力+真一段式端到端,定義硬派SUV智駕標桿

萬億科創沃土賦能,六聯智能劍指2026百億營收與1500萬臺AI終端雙目標

谷東智能斬獲2025中國AI好眼鏡優秀光波導廠商
融資超20億,這家“非GPU”芯片公司躋身國產AI算力第一梯隊


重磅獎項!清微智能斬獲2025安博會大獎,夯實國產AI算力第一梯隊
廣汽集團榮獲第五屆中國質量獎提名獎
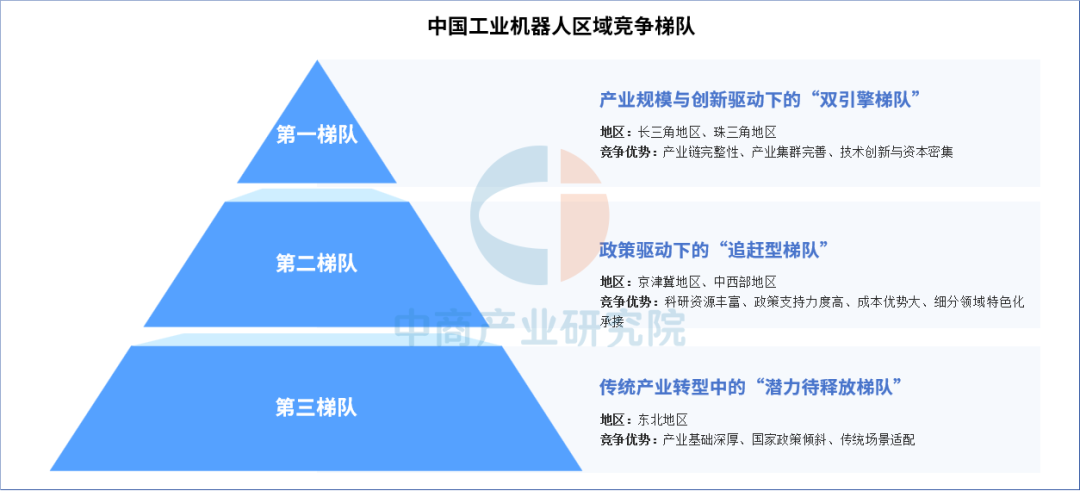
2025年中國工業機器人產業區域競爭梯隊分析(圖)
一文看懂AI算力集群

寶馬攜手Momenta共研中國專屬智能駕駛輔助系統 躋身智能駕駛體驗第一梯隊





 工商網監
工商網監
評論