 什么是RTK ?
什么是RTK ?

什么是 RTK(real-time kinematic實時運動學)?
實時運動學 (RTK) 定位是一種衛星導航技術,用于提高從衛星定位系統獲得的位置數據的精度。
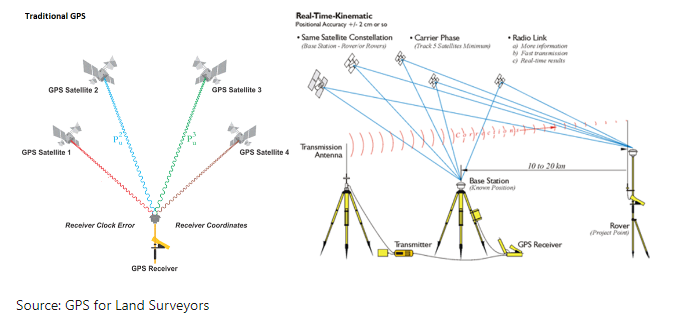
傳統的 GNSS 接收器測量信號從衛星傳播到接收器所需的時間。使用 4 個或更多衛星信號和三邊測量數學將使接收器能夠計算其位置。然而,這些信號在穿過電離層和大氣層時可能會失真,從而影響計算的位置精度(2 到 10 米)。 RTK 通過使用來自基站的實時校正解決了這個問題。基站知道它的固定位置,因此能夠估計接收信號的誤差。
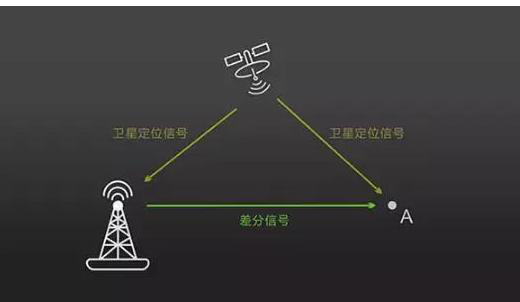
基站(base station)由具有已知和固定坐標的 GNSS 接收器組成。基站與流動站接收器(rover receiver)同時跟蹤相同的衛星。基站監測 GNSS 誤差并計算位置修正。位置修正通過無線電鏈路或互聯網服務發送到流動站接收器,流動站接收器使用這些消息來修正實時位置。RTK簡述
- 實時差分
- 靜態基站Static base-station
- 已知位置
- 向流動站發送“RTCM”校正信息
- 流動站Mobile rover
- RTCM 消息包含:
- 地點
- 代碼和載波測量
- 對于 L1 和 L2,所有視野內的衛星
RTK修正的標準GNSS誤差
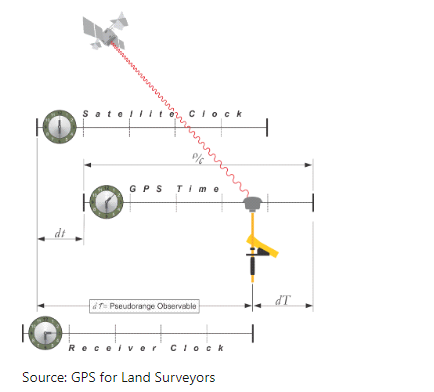
使用 RTK 可以通過補償使用標準 GNSS 估計位置的方式所產生的不準確性,從而使 GNSS 接收器的位置估計更加準確。標準 GNSS 使用衛星和接收器之間的偽距(pseudorange)估計來確定接收器在地球上的 3 維位置。在這種估計中,各種誤差源會導致接收器的估計位置出現明顯的不準確。 GNSS 衛星和 GNSS 接收器之間的時鐘誤差小至 1 微秒,將產生 300 米的誤差。通過同時使用四顆或更多衛星建立 GNSS 定位,接收器可以解決四個未知數:其 3-D 位置和相對于全球時間的時鐘誤差。
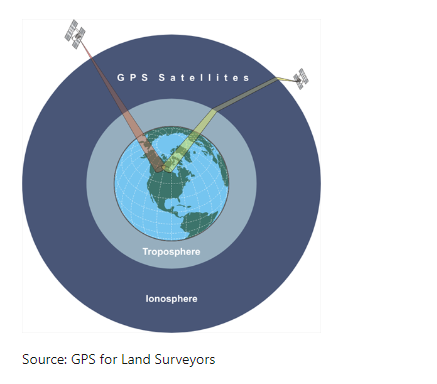
標準 GNSS 位置估計的另一個誤差來源是大氣延遲和不一致性,它們會扭曲接收器和衛星之間的無線電信號。不一致會因衛星的位置而異,尤其是在電離層中,會導致信號發生折射和衍射。低層大氣中的大氣壓力和濕度也會影響信號的時間。
由于需要衛星的位置來確定 GNSS 接收器的位置,因此衛星軌道形狀的扭曲會導致估計位置出現誤差。 GNSS 地面控制系統(GNSS ground control system)確實會向衛星發送校正信息,但微小的誤差仍會導致巨大的定位誤差。
RTK GNSS 的優勢在于可以使用進一步的校正信息來減輕衛星通信中固有的錯誤。通過從相對靠近接收機的已知基站位置接收RTK校正信息,基站可以計算出偽距估計中的大氣誤差并將其發送給流動站。通過使用 RTK,位置數據可以從米級精度提高到厘米級精度。
RTK的優缺點
使用 RTK 的主要好處是實時的高定位(厘米級)精度。使用 RTK 的其他優點:
- 精準導航
- 改進的位置估計
- 改善低速航向
- 減少靜態時的定位抖動
RTK的缺點:
- 需要具有已知坐標的基站
- 更高的基礎設施成本
傳統 RTK vs RTK 網絡 vs NTRIP 服務
傳統RTK
傳統的 RTK 基礎設施由兩部分組成:基站和流動站。流動站通過無線電調制解調器(UHF/VHF/Spread)從基站接收校正。這種基礎設施可能很昂貴、很復雜并且有局限性。 RTK 修正僅限于無線電信號的傳輸距離(5-10 公里)以及大氣和環境條件。無線電信號可能會被山丘、建筑物、樹木等阻擋。
RTK 網絡
RTK 網絡的主要目的是消除由大氣和環境條件引起的誤差,并通過 GSM 調制解調器將校正值實時發送到遠距離(100 公里)。 RTK 基礎架構比傳統 RTK 復雜得多。該系統由 3 個或更多進行連續觀測的參考站組成。參考站數據在分發給流動站之前由一個或多個中央服務器處理。服務器正在使用校正計算方法來計算校正。
NTRIP 服務
NTRIP(Networked Transport of RTCM via Internet Protocol, 通過互聯網協議的 RTCM 網絡傳輸)是一種協議,可通過互聯網通過常見的 TCP/IP 方法流式傳輸 RTK 校正數據。該系統由通過互聯網進行通信的兩部分組成:服務器端和流動站端。
服務器負責接收來自基站的數據,并通過 TCP/IP 將其轉播給流動站。 NTRIP 服務允許沒有 RTK 基站的用戶訪問 RTK 網絡。
使用 NTRIP 優于傳統 RTK 的好處:
- 無需擁有 RTK 基站
- 盡量減少無線電干擾的機會
- 通訊范圍無限制。 UHF/VHF/擴頻無線電的范圍有限
使用 NTRIP 的限制:
- 需要蜂窩服務以通過互聯網接收 RTK 校正數據
- 一些 NTRIP 服務需要付費訂閱
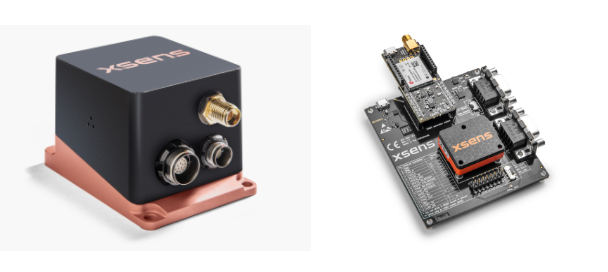
MTi-680G 是一個 GNSS/INS(慣性導航系統) 模塊,具有集成的 RTK GNSS 接收器,并提供同步的 3D 方向和位置輸出。
-
衛星導航
+關注
關注
3文章
266瀏覽量
27857 -
RTK
+關注
關注
8文章
196瀏覽量
39042
發布評論請先 登錄
【CPKCOR-RA8D1】基于CPKCOR-RA8D1的GNSS RTK系統設計
XSENS推出新款兼容RTK的慣性傳感器產品
基于A40i平臺在RTK接收主機上的應用
熟悉RTK算法原理和調試
RTK差分共享貓工作原理
Arduino RTK2 GPS模塊的資料合集
TAU1308 多系統 RTK 定位模塊
什么是RTK技術?
GPS—RTK技術的使用
什么是RTK?GPS與RTK有什么區別
什么是RTK定位 網絡RTK vs 傳統RTK對比

移動站和基站的RTK誤精度分析
什么是RTK?RTK的原理是什么?RTK對于無人機來說有什么用?



 工商網監
工商網監
評論