 CW32電機控制基礎——無刷直流電機轉速電流雙閉環控制分析
CW32電機控制基礎——無刷直流電機轉速電流雙閉環控制分析

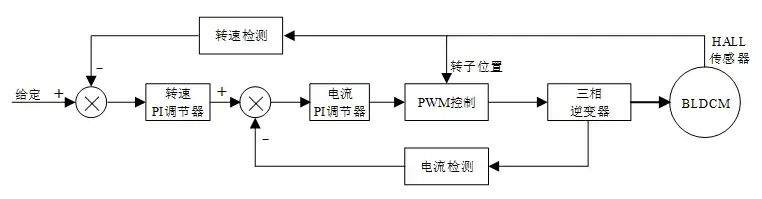
為解決轉速單閉環系統動態過程中的轉矩(電流)控制問題,在原轉速調節器后加入電流調節器,就構成了轉速、電流雙閉環調速系統,如圖1。
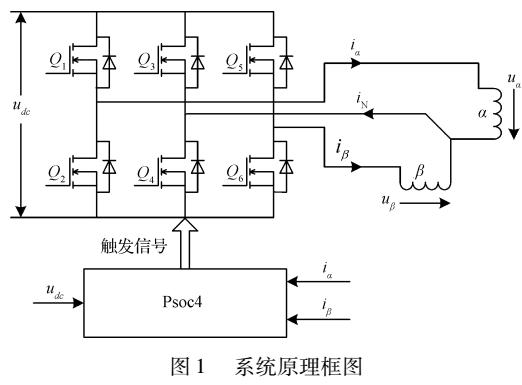
結合CW32的外設資源,以CW32微處理器為核心的BLDCM雙閉環控制系統組成框圖見圖CW32。
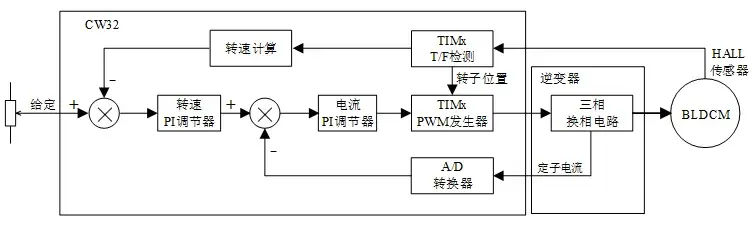
圖2 基于CW32的轉速電流雙閉環系統框圖
系統中設置了兩個調節器,轉速調節器的輸出作為電流調節器的輸入,電流調節器的輸出為PWM占空比控制電樞電壓從而實現對轉速的控制。其中,轉速調節器是調速系統的主導調節器,它使得動態時電機轉速跟隨其給定而變化,穩態時轉速無靜差或盡可能小;對負載變化起抗擾作用,其輸出決定流過電機電流的大小。電流調節器使電機電流緊緊跟隨其給定(轉速調節器輸出)而變化,對電網電壓的波動起及時抗擾作用;在起/制動過程中能夠以允許的最大電流啟動,從而加快動態過程;當電機過載甚至堵轉時,限制電流的最大值,起快速的自動保護作用。一旦故障消失,系統立即自動恢復正常。
一、 調節器參數工程設計方法
轉速、電流雙閉環系統是一種多環系統,設計多環系統的方法是:從內環開始逐步向外擴大,一環一環地進行設計,即先從電流內環開始,先設計好電流調節器,然后將電流環作為轉速調節外環的一個環節,再設計轉速調節器。
有刷直流電動機雙閉環調速系統,目前已有簡便實用、行之有效的調節器參數工程設計方法,而無刷直流電機和有刷直流電機有著類似的數學模型和相同的控制結構,故可以借鑒直流電機的設計方法進行參數設計。
1. 工程設計方法基本步驟
自動控制理論證明,0型系統在穩態時是有差的,而Ⅲ型和Ⅲ型以上的系統穩定困難。因此為了保證穩定性和穩態精度,多用Ⅰ型和Ⅱ型系統;其次典型Ⅰ、Ⅱ型系統,其參數和系統性能指標間的關系都已事先確定,按現成公式和表格數據經簡單計算即可確定調節器參數,參數選擇較簡單和方便。
第一步,按確保系統穩定和滿足所需穩態精度要求,選擇調節器結構。
第二步,按滿足系統動態性能指標要求,確定調節器參數。
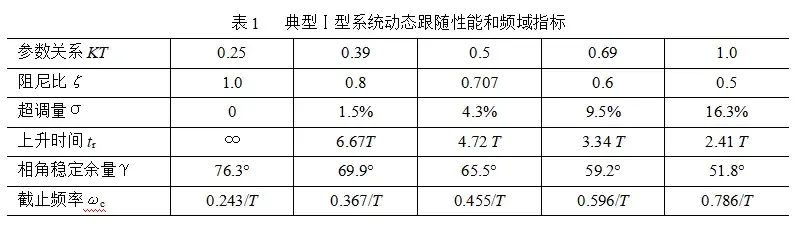
2. 典型Ⅰ型系統
典型Ⅰ型系統開、閉環傳遞函數如式(1)、(2)所示,系統動態跟隨性能與參數的關系見表1。

式中,K開環增益,T慣性環節時間常數。

式中,是ωn無阻尼時的自然振蕩角頻率(固有角頻率),
3. 典型Ⅱ型系統典型Ⅱ型系統開環傳遞函數如式(3)。

式中,開環增益,微分環節時間常數,慣性環節時間常數,τ>T。
令中頻寬h=是τ/T,
且
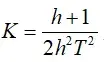
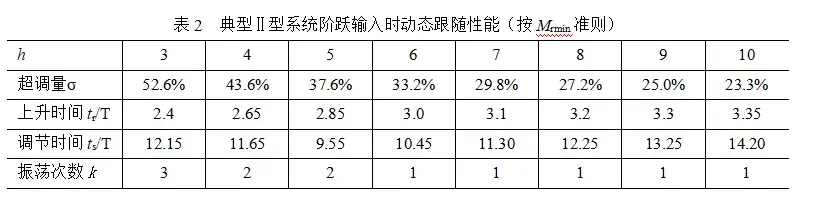
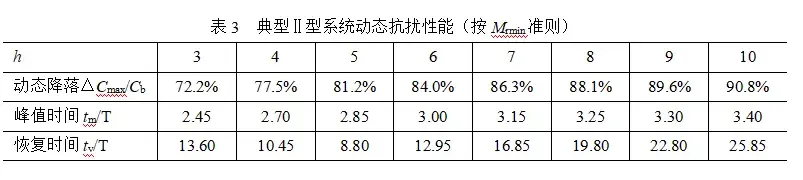
則得到閉環傳遞函數如式(4)。系統性能與參數的關系見表2,表3。

3.1.電流調節器設計
相對轉速環而言,在忽略反電動勢影響后,電流環就只與PWM逆變器和電機參數有關,其動態結構框圖見圖3。
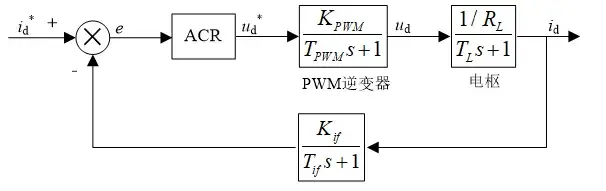
圖3 電流環動態結構框圖系統對電流環的設計要求是穩態無靜差,動態過程電流不超過允許值,也就是電流超調越小越好,從這個角度出發,電流環一般設計成典型I型系統,即電流調節器為PI調節器,則其傳遞函數為:

式中,Ki是調節器比例增益,τi為積分時間常數。由圖3可整理得到電流環開環傳遞函數如下:

相對于電流環閉環截止頻率,PWM逆變器可以看成一階慣性環節,其中
KPWM為逆變器的比例系數,在PWM控制時因逆變器輸出電壓與輸入電壓近似相等,因此KPWM=1,TPWM為PWM的載波周期;RL,LL分別為電機定子線電阻、線電感,TL為電機電磁時間常數(TL=LL/RL);Tif為電流反饋通道濾波時間常數,Kif為反饋增益,電流反饋采用AD采樣值,反饋值即代表實際值,即Kif=1。因遠大于Ts和Tif,按照調節器工程設計方法,選擇電流調節器零點對消被控對象的大時間常數極點,即:

綜合上述結論,式(6)可簡寫成:

由于Ts和Tif都是小時間常數,可以用一個時間常數為TΣi的慣性環節來代替這兩個小慣性環節,則電流環傳遞函數為:

式中,電流環開環增益
一般情況下,希望電流超調量σ%《5%時,參照表5.1可取ξ=0.707,即KI×TΣi=0.5,由此可得:

3.2.轉速調節器設計電流環是轉速環的內環,在設計轉速調節器時,首先要得到電流環的閉環傳遞函數,然后將其作為轉速環的一個環節后再進行轉速環的設計。電流環閉環傳遞函數:

當阻尼比ξ=0.707,KI×T∑i=0.5時,式(11)可寫作:

由于轉速環的截止頻率一般較低,忽略電流環閉環傳遞函數的高次項后,式(12)可近似為:

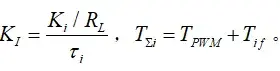
用電流環的等效傳遞函數代替原來的電流環后,可得轉速環的動態結構框圖如圖5-32所示。
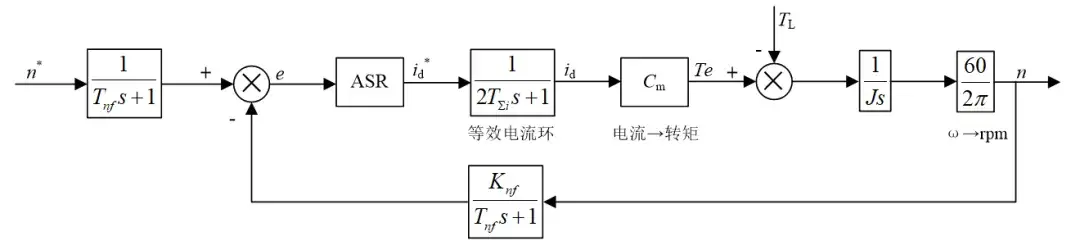
圖4 轉速環動態結構框圖
圖中,Cm為電磁轉矩常數,Tif為轉速反饋濾波時間常數,Knf為反饋增益,因數字系統中轉速反饋值和實際值一致,故Knf=1。將轉速給定及反饋濾波環節移至環內,且合并小慣性環節(即TΣn=2TΣi+Tnf)后,可得簡化后的轉速環動態框圖如圖5。
圖5 簡化轉速環動態結構框圖
由上可知,轉速環控制對象由一個慣性環節和一個積分環節構成,為滿足系統在穩態無靜差和動態有良好控制性能的要求,轉速環應按照典型Ⅱ型系統進行設計,故應選用PI調節器作轉速調節器,其傳遞函數為:

如此,轉速環開環傳遞函數為:

令轉速環開環增益KN為:

則

典型Ⅱ型系統參數選擇:

由式(16)和式(18)可知:
為滿足系統擁有較好的跟隨性和抗干擾性能,一般選擇h=5。3.3.數字PI調節器設計根據傳遞函數的定義,可得連續系統PI調節器輸出u(t)為:

式中,e(t)為調節器輸入,KP為比例增益,TI為積分時間常數。由于數字控制是采樣控制,它只能根據采樣時刻的偏差來計算控制量,故必須對上式進行離散化處理,用一系列采樣時刻點k來代替連續的時間t,離散化的PI算法表達式為:

式中,u(k)為調節器第k個時刻的控制輸出,e(k)為第k個時刻的偏差,Ts為采樣周期(即PI算法執行周期),KI為積分增益(KI=KPxTs/TI)。調節器采樣周期的選擇,必須考慮:1. 采樣周期要比對象的時間常數小得多,否則采樣信號無法反映瞬變過程;2. 采樣周期應遠小于對象擾動信號的周期;3. 考慮執行器的響應轉速;4. 當系統純滯后占主導地位時,應按純滯后大小選取,并盡可能使純滯后時間接近或等于采樣周期的整數倍;5. 考慮對象所要求的控制質量,精度越高,采樣周期越短;6. 從微處理器的計算量來看,一般要求采樣周期大些。綜合上述因素,系統采樣時間:

式中,我ωMAX系統最高頻率。如果系統最高頻率未知,則按預期的ωMAX選取。對于一般工業用調速裝置,可按轉矩(電流)內環ωMAX<1000,轉速外環ωMAX<200進行選取。二、 BLDCM雙閉環系統計算實例及simlink仿真調節器工程設計方法是在對原始系統進行了諸如模型降階、小慣性環節合并等簡化處理的基礎上得到的,可作為調節器參數的參考值,最終設定值還需以系統動靜態為目標在實際系統上多次反復調試得到。隨著計算機技術的進步,調節器參數調試也可以先在計算機中構建的系統模型上進行仿真調試,以得到合理的參數組合,為系統的實現提供理論依據,縮短參數整定的時間。
圖6 BLDCM轉速電流雙閉環simlink模型
圖6是采用Mlatlab2010b中BLDCM模型構建的雙閉環系統。電機參數:相電阻Rs=2.875Ω,相電感Ls=8.5mH,反電勢常數Ce=146.6077Vpeak/krpm,轉矩常數Cm =1.4Nm/Apeak,轉動慣量J=0.8e-3Kgm2,摩擦系數f=0.001Nm·s,極對數Ps=4,負載轉矩TL=3Nm。
三相逆變器直流母線電壓Udc=500V,單相PWM之載波頻率10KHz,換相邏輯采用二二導通方式(HPWM-LON)。
轉速反饋通道濾波時間常數Tnf =2ms,電流反饋通道濾波時間常數Tif =0.04ms,反饋增益Knf =Kif = 1。
1.模擬PI調節器設計及仿真從系統的已知參數,可按工程設計方法計算出調節器參數,下面是具體的計算過程。仿真模型參數:采用二二導通方式,故電樞方程:
電樞線電阻: RL=2×Rs =5.75 Ohm
電樞線電感: LL=2×Ls =17 mH
電磁時間常數:TL= RS/LS = 8.5/2.875 = 2.96 ms
機電時間常數:Tm= (GD2/375)×RL/Ce/Cm = (4×9.8×0.8e-3/375) ×5.75/(146.61/1000)/1.4 = 2.30 ms
PWM周期: TPWM=1/10e3=0.10 ms
電流調節器參數計算:
電流濾波時間常數: Tif =0.04 ms
電流環小慣性時間常數:T∑i= TPWM + Tif =0.10+0.04=0.14 ms
取ζ=0.707,則
電流環開環增益:KI=0.5/ T∑i=0.5/0.14e-3 = 3571.43 s-1
ACR積分時間: τi = TL= 2.96 ms
ACR比例增益:Ki= KI×RL×τi = 3571.43×5.75×2.96e-3=60.79
電流環校驗近似條件:
電流環開環截至頻率:ωci = KI= 3571.43 s-1
(1)PWM裝置傳遞函數近似條件:ωci ≤1/(3TPWM)
1/(3TPWM)=10000/3=3333.33,大致滿足近似條件。(2) 小時間常數近似處理條件:

(3) 忽略反電動勢對電流環影響的條件:

轉速調節器參數計算:
轉速濾波時間常數: Tnf =2 ms
轉速小慣性環節時間常數:T∑n= 2T∑i + Tnf =2.28 ms
取h=5,則
轉速環開環增益:KN= (h+1) / (2h2T∑n2 ) = 23084.02 s-2
ASR積分時間: τn = h T∑n = 5×2.28 = 11.4 ms
ASR比例增益: Kn= (h+1)J / (2hT∑nCm )/9.55= 6×0.8e-3/(10×2.28e-3×1.4)/9.55=0.0157
轉速環校驗近似條件:
轉速環開環截至頻率:ωcn = KN ×τn = 23084×11.4e-3=263.16 s-1
(1)電流環簡化條件:ωci ≤1/(5TΣi)
1/(5TΣi)=1428.57,完全滿足近似條件。
(2) 小時間常數近似處理條件:

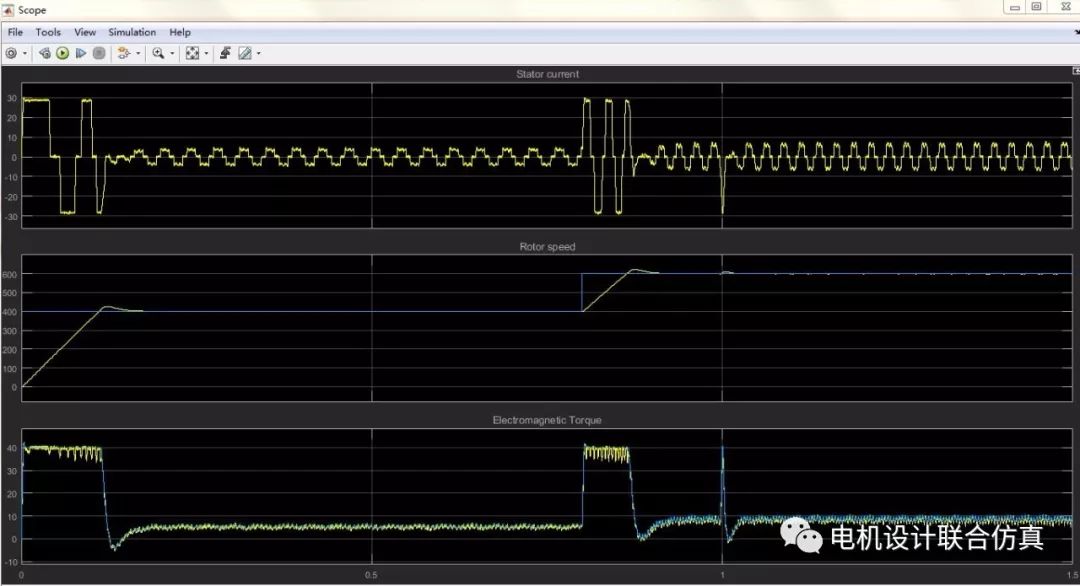
將所得參數代入調節器,得到系統仿真波形如圖7。

圖7 BLDCM轉速電流雙閉環啟動波形
圖7表明,工程設計方法得到的調節器參數不但能保證系統正常運行,且控制效果較佳。
2.數字PI調節器設計及仿真
在連續PI調節器設計的基礎上,下面進行數字PI調節器的設計。
1. 數字電流調節器參數計算
電流環采樣時間Ts ≤ π/ωmax,ωmax = ωci = 3571.43,則
Ts ≤ π/3571.43 = 0.88 ms,取Ts = 0.05 ms
數字ACR比例增益: Kp = Ki = 60.79
數字ACR積分增益: KI = Kp×Ts/τi = 60.79×0.05/2.96 = 1.03
2. 數字轉速調節器參數計算
轉速環采樣時間Ts ≤ π/ωmax,ωmax = ωcn = 263.16,則
Ts ≤ π/263.16 = 11.93 ms,取Ts = 0.5 ms
數字ASR比例增益: Kp = Kn = 0.0157
數字ASR積分增益: KI = Kp×Ts/τn = 0.0157×0.5/11.4 = 0.0007
以圖6為基礎,添加采樣保持器模塊構建雙閉環調速系統離散仿真模型如圖7,仿真結果見圖8。
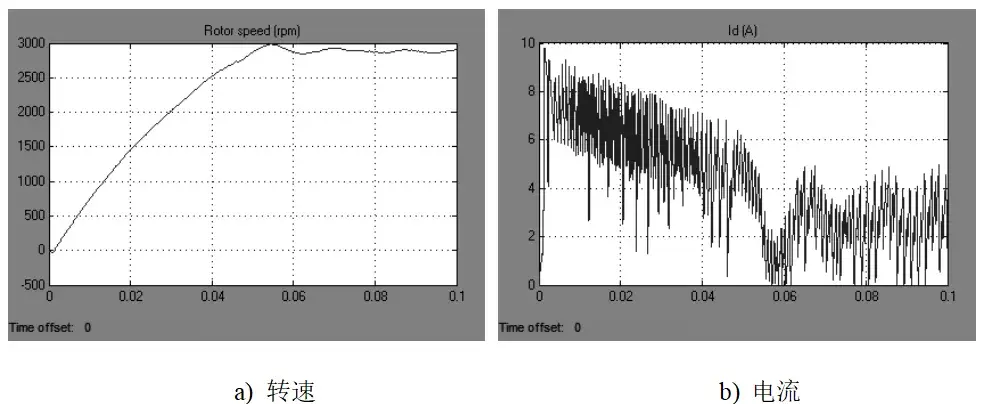
圖8 BLDCM轉速電流雙閉環離散系統波形
審核編輯 黃宇
-
電機控制
+關注
關注
3600文章
2131瀏覽量
277685 -
無刷直流電機
+關注
關注
61文章
740瀏覽量
49126 -
CW32
+關注
關注
1文章
299瀏覽量
1843
發布評論請先 登錄
CW32電機控制基礎——無刷直流電機的運行特性

無刷直流電機電動汽車再生ABS雙閉環控制研究
無刷直流電機模糊PI控制系統建模與仿真
直流電機轉速閉環控制

基于Simulink的無刷直流電機BLDC無位置閉環控制



 工商網監
工商網監
評論