") 采用PID補(bǔ)償網(wǎng)絡(luò)的Buck變換器仿真分析
采用PID補(bǔ)償網(wǎng)絡(luò)的Buck變換器仿真分析

設(shè)計(jì)指標(biāo)
輸入直流電壓(VIN):28V;
輸出電壓(VO):15V;
輸出電流(IIN):5A;
基準(zhǔn)電壓(Vref):5V;
開關(guān)頻率(fs):100kHz;
采樣網(wǎng)絡(luò)傳遞函數(shù)H(s)=5/15=1/3;
三角載波峰峰值Vm=4V。
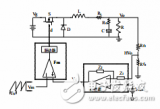
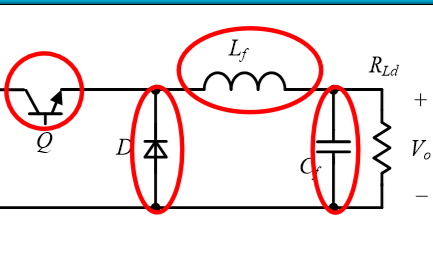
Buck變換器主電路如圖1所示:

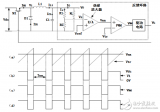
輸出電壓和輸出電流仿真波形如圖2:
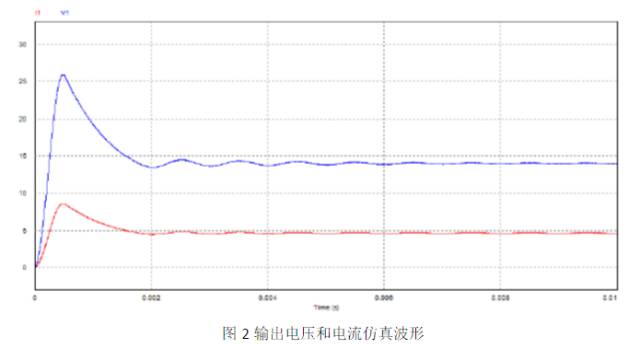
原始系統(tǒng)設(shè)計(jì)
(1)設(shè)計(jì)電壓采樣網(wǎng)絡(luò)。在設(shè)計(jì)開關(guān)調(diào)節(jié)系統(tǒng)時(shí),為消除穩(wěn)態(tài)誤差,在低頻段,尤其在直流頻率點(diǎn),開環(huán)傳遞函數(shù)的幅值要遠(yuǎn)大于1,即在直流頻率點(diǎn)系統(tǒng)為深度負(fù)反饋系統(tǒng)。對(duì)于深度負(fù)反饋系統(tǒng),參考電壓與輸出電壓之比等于電壓采樣網(wǎng)絡(luò)的傳遞函數(shù),即

(2)繪制原始系統(tǒng)的Bode圖。加在PWM的鋸齒波信號(hào)峰峰值為Vm=4V,采用小信號(hào)模型分析,給出Buck變換器傳遞函數(shù)T s 為:

交流小信號(hào)模型中電路參數(shù)計(jì)算如下:

根據(jù)原始系統(tǒng)的傳遞函數(shù)可以得到的波特圖如圖3所示

從圖3中可以看出穿越頻率為fc=1.83kHz,相位裕度為ψm=4.74,從表面上看,系統(tǒng)是穩(wěn)定的,但是如果系統(tǒng)中的參數(shù)發(fā)生變化,系統(tǒng)可能會(huì)變得不穩(wěn)定;另外穿越頻率太低,系統(tǒng)的響應(yīng)速度很慢。所以,要設(shè)計(jì)一個(gè)合理的補(bǔ)償網(wǎng)絡(luò)是系統(tǒng)能夠穩(wěn)定工作。
補(bǔ)償網(wǎng)絡(luò)的設(shè)計(jì)(使用SISOTOOL確定參數(shù))
原始系統(tǒng)主要問題是相位裕度太低、穿越頻率太低。改進(jìn)的思路是在遠(yuǎn)低于穿越頻率fc處,給補(bǔ)償網(wǎng)絡(luò)增加一個(gè)零點(diǎn)fZ,開環(huán)傳遞函數(shù)就會(huì)產(chǎn)生足夠的超前相移,保證系統(tǒng)有足夠的裕量;在大于零點(diǎn)頻率的附近增加一個(gè)極點(diǎn)fP,并且為了克服穩(wěn)態(tài)誤差大的缺點(diǎn),可以加入倒置零點(diǎn)fL,為此可以采用如圖4所示的PID補(bǔ)償網(wǎng)絡(luò)。

根據(jù)電路寫出的PID補(bǔ)償網(wǎng)絡(luò)的傳遞函數(shù)為:

在此我們通過使用Matlab中SISOTOOL工具來設(shè)計(jì)調(diào)節(jié)器參數(shù),可得:

首先確定PD調(diào)節(jié)器的參數(shù),按設(shè)計(jì)要求拖動(dòng)添加零點(diǎn)與極點(diǎn),所得參數(shù)如圖5

加入PD補(bǔ)償器之后的開環(huán)Bode圖,相頻裕度為52度,穿越頻率5KHz,如圖6所示:

然后加入倒置零點(diǎn),設(shè)計(jì)PID參數(shù),如圖7所示

加入PID之后,低頻段的增益抬高,穩(wěn)態(tài)誤差減小,如圖8

假設(shè)補(bǔ)償網(wǎng)絡(luò)中C1=1μF,依據(jù)前面的方法計(jì)算后,選用R1=94,R2=393,R3=12,C2=0.8uF。
由圖8可以看出,補(bǔ)償后,fc=5KHz,相位裕度ψm=52,高頻段f>fp,補(bǔ)償后的系統(tǒng)回路增益在fc處提升至0dB,且以-40dB/dec的斜率下降,能夠有效地抑制高頻干擾。
系統(tǒng)仿真
圖9為PID補(bǔ)償?shù)腂uck變化器系統(tǒng)Psim仿真圖

圖9 PID補(bǔ)償?shù)腂uck變化器系統(tǒng)Psim仿真圖
變換器仿真結(jié)果如圖10所示

驗(yàn)證加入擾動(dòng)影響
如圖11,系統(tǒng)在0.005ms時(shí)加一個(gè)10%的電流擾動(dòng),即并聯(lián)一個(gè)約30歐姆的電阻;在0.007ms時(shí)加一個(gè)2V的電壓擾動(dòng)。

仿真結(jié)果:
如果系統(tǒng)在突加10%負(fù)載電流擾動(dòng)時(shí),輸出電壓約有0.04V的波動(dòng),恢復(fù)時(shí)間僅需100μs;
突加2V電壓擾動(dòng)時(shí),輸出電壓約有0.1V的波動(dòng),恢復(fù)時(shí)間僅需1ms;


因此,我們可以知道采用PID補(bǔ)償?shù)淖儞Q器具有良好的動(dòng)態(tài)響應(yīng)和控制精度。
-
仿真
+關(guān)注
關(guān)注
55文章
4504瀏覽量
138481 -
PID
+關(guān)注
關(guān)注
38文章
1501瀏覽量
91490 -
Buck變換器
+關(guān)注
關(guān)注
3文章
81瀏覽量
19085 -
buck電路
+關(guān)注
關(guān)注
29文章
492瀏覽量
48993
原文標(biāo)題:基于pid控制方式的buck電路的設(shè)計(jì)仿真
文章出處:【微信號(hào):Power-union,微信公眾號(hào):電源聯(lián)盟】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
單級(jí)BUCK-BOOST變換器實(shí)現(xiàn)APFC的原理及分析
ZCS-PWM Buck變換器的工作原理是什么?
BUCK型DC-DC變換器的建模與仿真相關(guān)資料分享
BUCK變換器設(shè)計(jì)
PT功率變換器補(bǔ)償網(wǎng)絡(luò)設(shè)計(jì)
Buck變換器參數(shù)辨識(shí)的分析
Buck變換器的數(shù)字模糊PID控制
使用PSpice進(jìn)行Buck變換器的仿真研究的資料說明
Buck變換器的工作原理與設(shè)計(jì)的學(xué)習(xí)課件免費(fèi)下載
電壓反饋型BUCK變換器的環(huán)路補(bǔ)償設(shè)計(jì)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論