 高壓放大器在介電高彈聚合物疊層彎曲驅動器中的應用
高壓放大器在介電高彈聚合物疊層彎曲驅動器中的應用

實驗名稱:介電高彈聚合物疊層彎曲驅動器的建模與控制
實驗目的:通過Hamilton原理與假設模態法建立彎曲驅動器大變形過程的動力學模型,并基于該動力學模型發展了相應的自適應控制方法,補償驅動過程中的不確定性與非線性。實驗結果證明了在動態彎曲過程中相關控制策略的性能。
實驗過程:

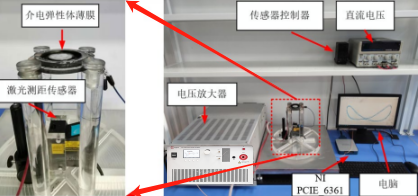
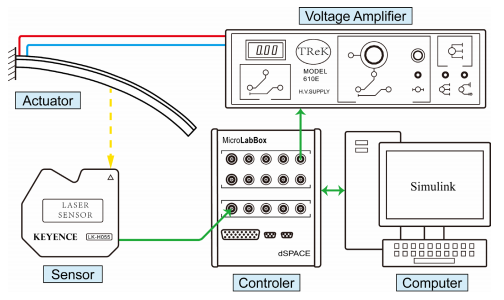
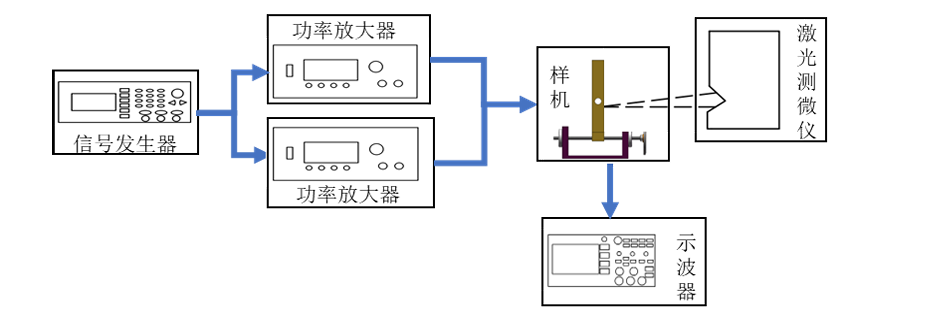
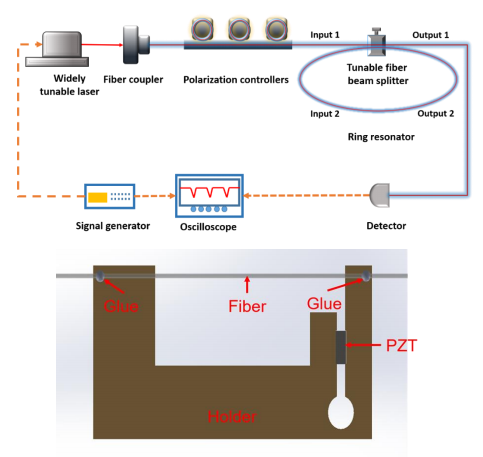
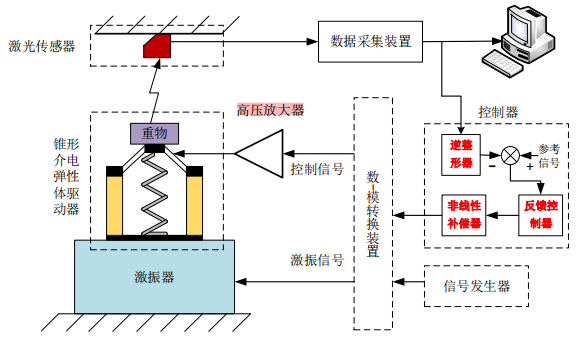
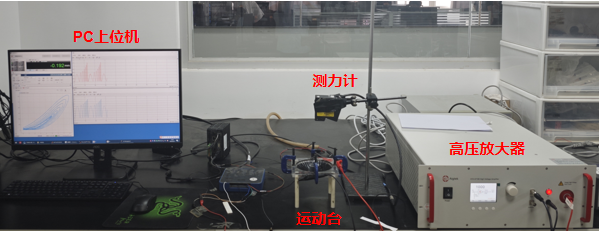
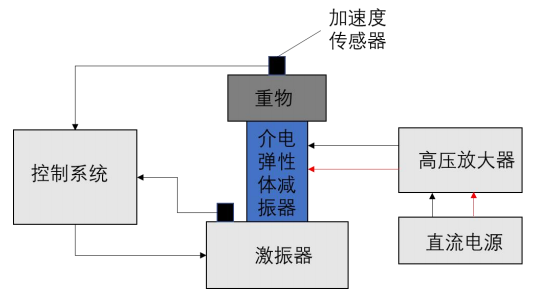
圖1:疊層彎曲驅動器實驗設置示意圖
實驗設置如圖1所示。一個完整的控制流程如下:激光位移傳感器測量當前彎曲驅動器的垂直位移,并將實時數據發送給控制板。控制板對位移信號進行采樣,并利用插值計算對采樣信號進行處理,消除驅動器水平位移的影響。速度信號則通過對相鄰位移測量值進行差分運算得到,加速度信號同理。控制板根據反饋信號計算出控制量后,將模擬控制信號發送至高壓放大器。高壓放大器將接收到的控制信號放大,變成輸出在驅動器上的電壓。此外,一臺通用計算機作為上位機與控制板進行通信,用于控制參數調整與數據記錄。該系統的控制頻率設置為1kHz。
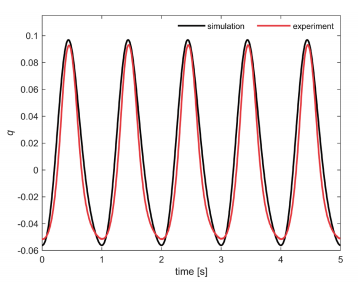
圖2:參數識別實驗結果,正弦激勵下的位移-時間曲線
控制率式中有部分動力學參數需要進行參數辨識。參數辨識的初始值可以通過公式得到,然后進一步在Simulink軟件中用仿真結果擬合實驗數據以調節參數。最終得到的辨識結果。圖2是輸入電壓信號為峰-峰值700v、頻率1hz的偏置正弦波的參數識別結果,可以看出模擬結果(黑色曲線)與實驗結果(紅色曲線)吻合較好。最終標定出來的參數估計值會在實際控制過程中通過自適應律動態改變。
接下來,驗證提出的控制器的性能。為了證明自適應律的有效性,下面的實驗對比無參數自適應的控制器(C1)和有參數自適應的控制器(C2)的表現。
圖3,4,5分別為跟蹤正弦參考軌跡的頻率為1Hz、1.5Hz和2Hz時,兩個控制器的控制實驗結果。可以看到,在1Hz情況下兩個控制器產生的位移可以很好地跟蹤參考軌跡,但C2的跟蹤精度高于C1。而隨著參考軌跡頻率的增加,C2和C1之間的性能差距變得更大。即便C1的反饋增益
審核編輯 黃宇
-
驅動器
+關注
關注
54文章
9082瀏覽量
155481 -
高壓放大器
+關注
關注
4文章
792瀏覽量
15856
發布評論請先 登錄
高壓放大器在介電彈性體驅動器性能測試中的應用
高壓放大器在聚合物薄膜電學性能測試中的應用


解鎖性能:高壓放大器成為聚合物薄膜電學測試的“理想橋梁”
高壓放大器在并聯T型壓電慣性驅動器研究中的應用
高壓放大器在電子測試中的應用研究
安泰:高壓放大器在靜電紡絲中的具體應用
安泰電子ATA-7030高壓放大器在介電領域研究中的應用(合集)
高壓放大器在電致動介電彈性體圓柱驅動器中的應用




 工商網監
工商網監
評論