") 汽車CAN FD系統(tǒng)基礎(chǔ)芯片TCAN1164-Q1:特性、應(yīng)用與設(shè)計要點
汽車CAN FD系統(tǒng)基礎(chǔ)芯片TCAN1164-Q1:特性、應(yīng)用與設(shè)計要點

汽車CAN FD系統(tǒng)基礎(chǔ)芯片TCAN1164-Q1:特性、應(yīng)用與設(shè)計要點
在汽車電子領(lǐng)域,隨著高級駕駛輔助系統(tǒng)(ADAS)、汽車信息娛樂系統(tǒng)等的不斷發(fā)展,對高速、可靠的通信技術(shù)需求日益增長。CAN FD(Controller Area Network with Flexible Data Rate)作為一種重要的汽車通信協(xié)議,能夠滿足汽車電子系統(tǒng)對數(shù)據(jù)傳輸速率和可靠性的要求。而TCAN1164-Q1作為一款符合AEC Q100標(biāo)準(zhǔn)的汽車CAN FD系統(tǒng)基礎(chǔ)芯片(SBC),為汽車電子設(shè)計提供了強(qiáng)大的支持。本文將詳細(xì)介紹TCAN1164-Q1的特性、應(yīng)用以及設(shè)計要點,幫助電子工程師更好地了解和應(yīng)用這款芯片。
文件下載:tcan1164-q1.pdf
一、芯片概述
TCAN1164-Q1是一款高速控制器局域網(wǎng)(CAN)系統(tǒng)基礎(chǔ)芯片,符合ISO 11898-2:2016高速CAN規(guī)范的物理層要求。該收發(fā)器支持傳統(tǒng)CAN和CAN FD網(wǎng)絡(luò),數(shù)據(jù)速率高達(dá)8兆位/秒(Mbps)(TCAN1164-Q1)或5Mbps(TCAN1164T-Q1),能夠滿足不同汽車應(yīng)用場景對數(shù)據(jù)傳輸速率的需求。
同時,TCAN1164-Q1支持寬輸入電源電壓范圍,并且集成了5V LDO輸出。5V LDO輸出(VCCOUT)可在內(nèi)部為CAN收發(fā)器提供電壓,并在外部提供額外電流,為系統(tǒng)設(shè)計提供了便利。
二、特性亮點
2.1 符合汽車標(biāo)準(zhǔn)與規(guī)范
該芯片符合面向汽車應(yīng)用的AEC Q100(1級)標(biāo)準(zhǔn),符合ISO 11898-2:2016的要求,具備功能安全質(zhì)量管理型,還提供可幫助進(jìn)行功能安全系統(tǒng)設(shè)計的文檔,確保了在汽車環(huán)境中的可靠性和安全性。
2.2 強(qiáng)大的電源與性能
- 寬工作輸入電壓范圍:支持寬范圍的輸入電源電壓,為系統(tǒng)設(shè)計提供了更大的靈活性。
- 集成LDO輸出:集成了具有100mA輸出電流能力的5V LDO,可為CAN收發(fā)器及其他外部設(shè)備供電。
- 高速數(shù)據(jù)傳輸:支持高達(dá)8Mbps(TCAN1164-Q1)或5Mbps(TCAN1164T-Q1)的傳統(tǒng)CAN和CAN FD通信,滿足高速數(shù)據(jù)傳輸需求。
2.3 豐富的保護(hù)與診斷功能
- 總線故障保護(hù):具備±58V CAN總線容錯能力,能夠有效應(yīng)對總線短路等故障情況。
- 電源保護(hù):支持VSUP上的負(fù)載突降保護(hù)、IEC ESD保護(hù)、欠壓和過壓保護(hù)以及熱關(guān)斷保護(hù),確保芯片在各種惡劣電源環(huán)境下正常工作。
- TXD顯性狀態(tài)超時保護(hù):防止因TXD長時間處于顯性狀態(tài)而影響網(wǎng)絡(luò)通信。
2.4 靈活的工作模式與看門狗功能
- 多種工作模式:可通過SPI編程選擇正常模式、靜音模式和待機(jī)模式,滿足不同應(yīng)用場景的需求。
- 看門狗計時器:支持超時、窗口和問答看門狗(Q&A)等多種模式,確保系統(tǒng)的穩(wěn)定性和可靠性。
2.5 良好的封裝與檢測特性
采用無引線VSON(14)封裝,具有可濕性側(cè)面,提高了自動光學(xué)檢測(AOI)能力,方便生產(chǎn)制造過程中的檢測和組裝。
三、應(yīng)用領(lǐng)域
3.1 高級駕駛輔助系統(tǒng)(ADAS)
在ADAS系統(tǒng)中,需要大量的傳感器數(shù)據(jù)進(jìn)行實時處理和傳輸,TCAN1164-Q1的高速數(shù)據(jù)傳輸能力和可靠的通信性能能夠滿足傳感器與控制器之間的數(shù)據(jù)交互需求,確保系統(tǒng)的實時性和準(zhǔn)確性。
3.2 車身電子裝置和照明
車身電子裝置如車門控制、車窗控制、照明系統(tǒng)等,需要穩(wěn)定的通信協(xié)議來實現(xiàn)各個模塊之間的協(xié)同工作。TCAN1164-Q1的可靠性和低功耗特性使其成為車身電子系統(tǒng)的理想選擇。
3.3 汽車信息娛樂系統(tǒng)和儀表組
汽車信息娛樂系統(tǒng)和儀表組需要處理大量的多媒體數(shù)據(jù)和車輛狀態(tài)信息,TCAN1164-Q1的高速數(shù)據(jù)傳輸和靈活的工作模式能夠滿足這些系統(tǒng)對數(shù)據(jù)傳輸速率和穩(wěn)定性的要求。
3.4 混合動力、電動和動力總成系統(tǒng)
在混合動力、電動和動力總成系統(tǒng)中,電池管理、電機(jī)控制等模塊之間需要進(jìn)行精確的數(shù)據(jù)通信,TCAN1164-Q1的高精度和可靠性能夠確保這些系統(tǒng)的正常運行。
四、詳細(xì)特性解析
4.1 引腳功能與配置
TCAN1164-Q1共有14個引腳,每個引腳都有其特定的功能。例如,TXD為CAN發(fā)送數(shù)據(jù)輸入引腳,集成了上拉電阻;VCCOUT為5V LDO調(diào)節(jié)輸出電壓引腳;CANH和CANL為CAN總線的高低電平輸入/輸出引腳等。了解每個引腳的功能和配置要求,對于正確使用芯片至關(guān)重要。
4.2 電氣特性與性能參數(shù)
文檔中詳細(xì)列出了芯片的各項電氣特性和性能參數(shù),包括絕對最大額定值、ESD額定值、推薦工作條件、電源特性、電氣特性、開關(guān)特性和典型特性等。這些參數(shù)為工程師在設(shè)計電路時提供了重要的參考依據(jù),確保芯片在合適的條件下工作,發(fā)揮最佳性能。
4.3 功能模塊與工作模式
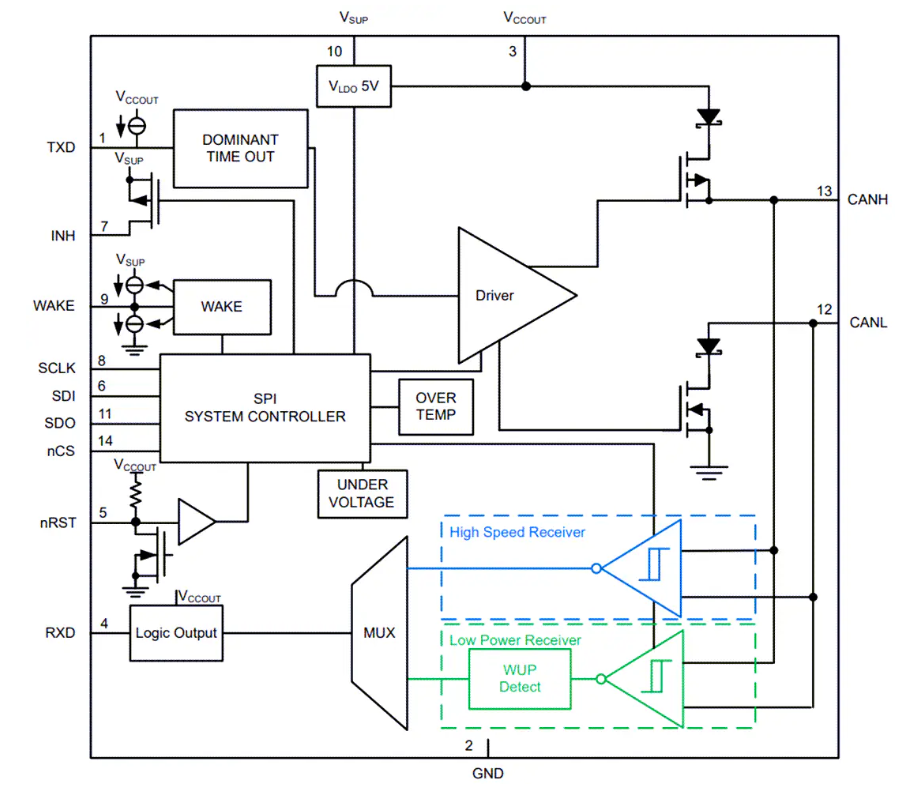
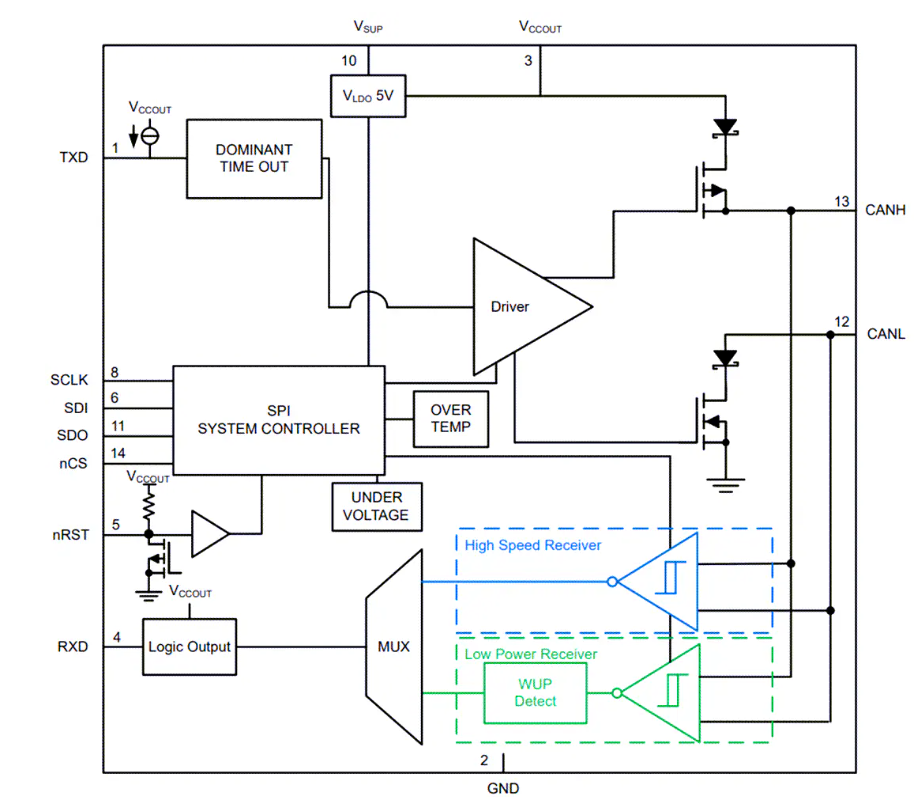
4.3.1 功能模塊
芯片內(nèi)部包含多個功能模塊,如CAN收發(fā)器、LDO調(diào)節(jié)器、看門狗電路、故障檢測電路等。這些模塊協(xié)同工作,實現(xiàn)了芯片的各種功能。例如,CAN收發(fā)器負(fù)責(zé)數(shù)據(jù)的發(fā)送和接收,LDO調(diào)節(jié)器為芯片和外部設(shè)備提供穩(wěn)定的電源,看門狗電路用于監(jiān)控系統(tǒng)的運行狀態(tài),故障檢測電路能夠及時發(fā)現(xiàn)并處理各種故障情況。
4.3.2 工作模式
TCAN1164-Q1支持多種工作模式,包括正常模式、靜音模式、待機(jī)模式、復(fù)位模式和故障安全模式等。不同的工作模式適用于不同的應(yīng)用場景,工程師可以根據(jù)實際需求通過SPI編程進(jìn)行選擇。例如,正常模式下CAN收發(fā)器和接收器都處于工作狀態(tài),實現(xiàn)雙向數(shù)據(jù)通信;靜音模式下CAN驅(qū)動器禁用,僅接收器工作,實現(xiàn)單向數(shù)據(jù)接收;待機(jī)模式下芯片處于低功耗狀態(tài),當(dāng)檢測到喚醒事件時可快速恢復(fù)正常工作。
4.4 看門狗功能
看門狗功能是TCAN1164-Q1的一個重要特性,它可以確保系統(tǒng)在出現(xiàn)故障或異常時能夠及時恢復(fù)正常運行。芯片提供了窗口基于的看門狗以及可選的自主、超時或問答(Q&A)看門狗模式,可通過SPI編程進(jìn)行配置。
在使用看門狗功能時,需要注意以下幾點:
- 錯誤計數(shù)器:芯片具有看門狗錯誤計數(shù)器,用于記錄錯過窗口或輸入錯誤觸發(fā)事件的次數(shù)。當(dāng)計數(shù)器達(dá)到設(shè)定的閾值時,將觸發(fā)相應(yīng)的動作。
- 定時配置:不同的看門狗模式需要根據(jù)實際需求進(jìn)行合理的定時配置,以確保系統(tǒng)的穩(wěn)定性和可靠性。例如,在需要更頻繁輸入觸發(fā)事件的場景下,建議使用超時模式。
- 問答看門狗:問答看門狗模式要求MCU從芯片讀取“問題”,進(jìn)行數(shù)學(xué)計算后將答案寫回芯片。正確回答問題才能使看門狗正常工作,否則將觸發(fā)錯誤處理機(jī)制。
4.5 總線故障檢測與通信
TCAN1164-Q1具備先進(jìn)的總線故障檢測功能,能夠檢測CAN總線的短路、斷路、接地等故障情況,并設(shè)置相應(yīng)的狀態(tài)/中斷標(biāo)志,以便MCU及時了解故障信息。
在實際應(yīng)用中,由于CAN網(wǎng)絡(luò)的復(fù)雜性,并非所有故障都能精確到具體位置。芯片通過監(jiān)測CANH和CANL引腳的電流來判斷故障類型,但故障檢測結(jié)果可能會受到設(shè)備位置的影響。因此,在系統(tǒng)設(shè)計中,需要對每個節(jié)點進(jìn)行系統(tǒng)級的診斷,并將診斷信息反饋到中央點,以實現(xiàn)對整個CAN網(wǎng)絡(luò)的全面故障檢測和管理。
五、設(shè)計要點與注意事項
5.1 電源設(shè)計
- 輸入電壓范圍:TCAN1164-Q1的輸入電源電壓范圍為5.5V至28V,輸入電源必須經(jīng)過良好的穩(wěn)壓處理。建議在靠近芯片VSUP供電引腳處放置一個100nF的旁路電容,以減少開關(guān)電源輸出的電壓紋波,并補償PCB電源平面和走線的電阻和電感。
- LDO輸出:VCCOUT引腳為5V LDO調(diào)節(jié)輸出,該引腳需要一個10μF的外部電容,且應(yīng)盡可能靠近引腳放置,以確保輸出電壓的穩(wěn)定性。在CAN總線發(fā)生故障需要LDO提供額外電流時,可能會影響外部負(fù)載組件的可用電流,因此在設(shè)計時需要考慮這種情況。
5.2 布局設(shè)計
- 保護(hù)和濾波電路:將保護(hù)和濾波電路盡可能靠近總線連接器放置,以防止瞬態(tài)、ESD和噪聲傳入電路板。可以添加瞬態(tài)電壓抑制(TVS)器件進(jìn)行額外的保護(hù),如雙向TVS二極管或壓敏電阻,其額定值應(yīng)符合應(yīng)用要求。
- 信號路徑設(shè)計:按照信號路徑設(shè)計總線保護(hù)組件,避免瞬態(tài)電流偏離信號路徑到達(dá)保護(hù)器件。使用電源和接地平面提供低電感路徑,以減少信號干擾。
- 電容和連接:旁路電容和大容量電容應(yīng)盡可能靠近收發(fā)器的電源端子放置。對于旁路電容和保護(hù)器件的電源和接地連接,建議使用至少兩個過孔,以最小化走線和過孔的電感。
- 總線終端:布局示例中展示了分裂終端的設(shè)計,即將終端電阻分為兩個電阻,通過電容將終端的中心或分接頭連接到地。這種設(shè)計可以為總線提供共模濾波。當(dāng)總線終端放置在電路板上而不是直接在總線上時,需要特別注意確保終端節(jié)點不會從總線上移除,以免影響總線的正常工作。
5.3 編程與配置
- SPI通信:芯片采用標(biāo)準(zhǔn)的SPI接口進(jìn)行通信,每個SPI事務(wù)包含一個地址和讀寫命令字節(jié),后面跟著一到三個數(shù)據(jù)字節(jié)。在進(jìn)行SPI通信時,需要注意時鐘信號(SCLK)的頻率和邊沿觸發(fā)特性,以及數(shù)據(jù)輸入(SDI)和輸出(SDO)的采樣和變化時刻。
- 寄存器配置:芯片的各種功能和參數(shù)通過寄存器進(jìn)行配置,如模式控制寄存器、看門狗配置寄存器、中斷使能寄存器等。在進(jìn)行寄存器配置時,需要仔細(xì)閱讀文檔,了解每個寄存器的功能和位定義,確保正確設(shè)置寄存器的值。
5.4 ESD防護(hù)
由于該集成電路容易受到ESD的損壞,在處理和安裝芯片時必須采取適當(dāng)?shù)念A(yù)防措施。ESD損壞可能會導(dǎo)致芯片性能下降甚至完全失效,特別是對于精密集成電路,微小的參數(shù)變化都可能導(dǎo)致芯片無法滿足其規(guī)格要求。因此,在整個生產(chǎn)和使用過程中,都要確保良好的靜電防護(hù)措施。
六、總結(jié)
TCAN1164-Q1作為一款高性能的汽車CAN FD系統(tǒng)基礎(chǔ)芯片,具有豐富的特性和強(qiáng)大的功能,能夠滿足汽車電子系統(tǒng)對高速、可靠通信的需求。在實際設(shè)計中,電子工程師需要充分了解芯片的特性、引腳功能、電氣參數(shù)、工作模式等方面的知識,合理進(jìn)行電源設(shè)計、布局設(shè)計和編程配置,并注意ESD防護(hù)等問題,以確保系統(tǒng)的穩(wěn)定性和可靠性。
同時,隨著汽車電子技術(shù)的不斷發(fā)展,對芯片的性能和功能要求也在不斷提高。TCAN1164-Q1在設(shè)計上已經(jīng)考慮了很多未來的發(fā)展趨勢,但在實際應(yīng)用中,工程師還需要不斷關(guān)注新技術(shù)、新標(biāo)準(zhǔn)的發(fā)展,結(jié)合具體的應(yīng)用場景進(jìn)行優(yōu)化設(shè)計,以充分發(fā)揮芯片的優(yōu)勢,為汽車電子系統(tǒng)的發(fā)展做出貢獻(xiàn)。
你在使用TCAN1164-Q1芯片的過程中遇到過哪些問題?或者你對芯片的哪些特性更感興趣?歡迎在評論區(qū)留言討論。
-
汽車電子
+關(guān)注
關(guān)注
3045文章
9037瀏覽量
173013 -
CAN FD
+關(guān)注
關(guān)注
0文章
94瀏覽量
13404
發(fā)布評論請先 登錄
TCAN1164-Q1 具有 LDO 輸出和看門狗的汽車 CAN FD系統(tǒng)基礎(chǔ)芯片數(shù)據(jù)表

汽車級CAN FD系統(tǒng)基礎(chǔ)芯片TCAN1167-Q1技術(shù)解析
?TCAN1164-Q1汽車CAN FD系統(tǒng)基礎(chǔ)芯片技術(shù)解析



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論