 如何挑選一款gps北斗導航衛星信號模擬器 導航衛星模擬器 gps模擬信號發生器
如何挑選一款gps北斗導航衛星信號模擬器 導航衛星模擬器 gps模擬信號發生器

GNSS衛星信號模擬器作為測試GNSS接收機性能的核心設備,其作用愈發凸顯。它能夠在實驗室環境中精準復現衛星導航信號,擺脫戶外測試受天氣、地理位置、信號遮擋等因素的限制,為接收機的研發、生產、校準提供穩定可控的測試條件。
導航衛星模擬器的工作原理:從信號生成到接收驗證
GNSS衛星信號模擬器的本質是“信號復現系統”,其核心功能是模擬衛星在太空中的運行狀態,并生成與真實衛星信號特性一致的射頻信號,供接收機接收和解算。其工作過程主要分為四個關鍵環節,各環節緊密銜接,共同保障信號模擬的精準性。
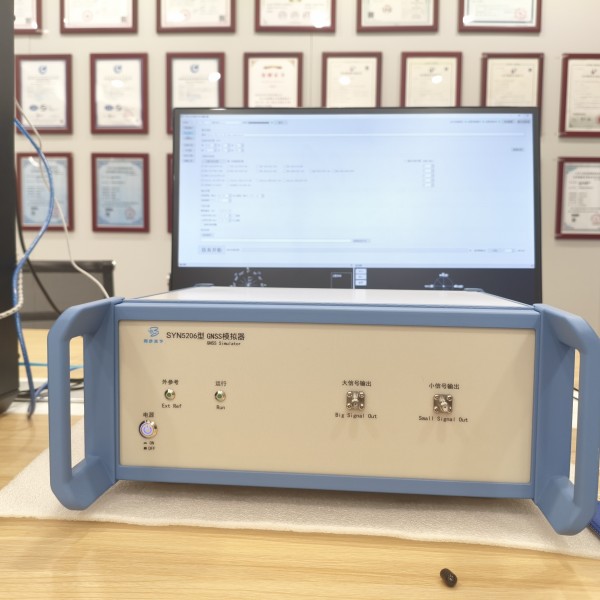
 SYN5206型GNSS模擬器
SYN5206型GNSS模擬器
1.1 衛星軌道與時間基準構建
模擬器首先需要建立衛星軌道模型和時間基準,這是信號模擬的“源頭”。它通過內置的衛星星歷數據庫(如GPS的廣播星歷、GLONASS的歷書數據等),計算出任意時刻、任意地理位置上空衛星的三維坐標、運行速度及姿態。同時,模擬器需搭載高精度的時間基準模塊,如恒溫晶振(OCXO)或原子鐘,確保模擬信號的時間同步精度與真實衛星一致。以SYN5206為例,其采用高精度OCXO時鐘,頻率穩定度可達±1×10??/天,為信號模擬提供了可靠的時間基準,保障了后續偽距、載波相位等參數的準確性。
1.2 導航電文與基帶信號生成
在軌道與時間基準的基礎上,模擬器生成導航電文和基帶信號。導航電文包含衛星星歷、時鐘校正參數、電離層延遲模型等關鍵信息,是接收機實現定位的核心依據。基帶信號則是將導航電文與偽隨機碼(如GPS的C/A碼、P碼)進行調制后的數字信號,其碼率、調制方式需嚴格遵循GNSS系統的技術規范。SYN5206型gnss信號發生器支持GPS L1 C/A、GLONASS G3、BDS B1I等多系統信號模擬,能夠根據不同系統的協議生成對應的基帶信號,滿足多模接收機的測試需求。
1.3 射頻信號調制與放大
基帶信號需經過射頻調制轉換為高頻模擬信號,才能被接收機接收。這一環節中,模擬器將基帶信號調制到GNSS系統對應的載波頻率上(如GPS L1的1575.42MHz、BDS B1I的1561.098MHz),并通過射頻模塊進行信號放大和濾波,確保輸出信號的功率、頻譜純度符合測試要求。SYN5206的射頻輸出功率范圍為-130dBm至-80dBm,可根據測試場景靈活調節,同時其射頻模塊采用低噪聲設計,雜散抑制優于-60dBc,有效避免了雜波信號對測試結果的干擾。
1.4 場景參數配置與動態模擬
為滿足復雜場景下的測試需求,模擬器還具備場景參數配置與動態模擬功能。用戶可通過軟件設置測試場景的地理位置(經緯度、海拔)、運動軌跡(速度、加速度、航向)、環境干擾(多徑效應、電離層延遲、噪聲水平)等參數。模擬器根據這些參數實時調整衛星信號的傳播延遲、多普勒頻移等特性,復現接收機在真實環境中的工作狀態。
GNSS衛星信號模擬器重要指標解讀
GNSS衛星信號模擬器的指標眾多,不同指標反映了設備在不同方面的性能表現。以下從時間基準、信號生成、射頻輸出、動態模擬四個維度,解讀最核心的指標及其對測試的影響,并結合SYN5206的參數進行具體說明。
 SYN5206型GNSS模擬器
SYN5206型GNSS模擬器
2.1 時間基準指標:頻率穩定度與時間同步精度
時間基準是模擬器的“心臟”,其性能直接決定了模擬信號的時間準確性。頻率穩定度是指時鐘信號頻率隨時間變化的程度,通常用短期穩定度(如1秒、10秒)和長期穩定度(如1天、1個月)來表示。頻率穩定度越高,模擬信號的偽距誤差越小,定位精度測試結果越可靠。SYN5206采用高精度OCXO恒溫晶振,短期頻率穩定度≤5×10?11/1s,長期頻率穩定度±1×10??/天,能夠滿足中高精度測試的需求。**時間同步精度**是指模擬器與真實GNSS系統時間的同步誤差,通常要求≤1μs,確保導航電文中的時間信息與真實衛星一致。
2.2 信號生成指標:信號體制兼容性與碼率精度
信號體制兼容性是指模擬器支持的GNSS系統和信號頻段數量,是衡量設備通用性的重要指標。目前主流的GNSS系統包括GPS、BDS、GLONASS、Galileo,信號頻段涵蓋L1、L2、L5(GPS),B1I、B1C、B2a(BDS)等。SYN5206支持GPS L1 C/A、BDS B1I、GLONASS G3等多系統信號,可滿足多模接收機的測試需求。**碼率精度**是指模擬偽隨機碼的速率精度,碼率誤差會導致偽距測量誤差,影響定位精度。SYN5206的碼率精度優于±0.1ppm,確保了偽距模擬的準確性。此外,**調制精度**(如EVM、相位誤差)也是重要指標,調制精度差會導致信號失真,影響接收機的解調性能。
2.3 射頻輸出指標:輸出功率、頻譜純度與雜散抑制
輸出功率范圍是指模擬器能夠輸出的射頻信號功率區間,需覆蓋接收機的靈敏度范圍(通常為-140dBm至-80dBm),以測試接收機在不同信號強度下的捕獲、跟蹤性能。SYN5206的輸出功率范圍為-130dBm至-80dBm,可通過軟件步進0.1dB調節,滿足大多數接收機的測試需求。頻譜純度主要用相位噪聲和雜散抑制來衡量。相位噪聲反映了載波頻率的穩定性,相位噪聲過大會導致接收機的載波跟蹤環路不穩定,影響定位精度;雜散抑制則是指對非目標頻率信號的抑制能力,雜散信號過強會干擾接收機對有用信號的接收。SYN5206的諧波抑制≤-40dBc,非諧波抑制≤-40dBc。
 SYN5206型GNSS模擬器
SYN5206型GNSS模擬器
2.4 動態模擬指標:動態范圍與軌跡更新率
動態范圍是指模擬器能夠模擬的運動參數范圍,包括速度(如0至1000m/s,滿足航空、航天場景需求)、加速度(如0至10g)、航向角(0至360°)等。動態范圍越大,模擬器能夠復現的場景越復雜。SYN5206的速度模擬范圍為0至500m/s,加速度范圍為0至5g,可滿足車載、艦載等中高速場景的測試需求。軌跡更新率是指模擬器更新運動軌跡參數的頻率,更新率越高,動態模擬的連續性越好,尤其對于高速運動場景,高更新率能夠避免軌跡“跳變”導致的測試誤差。
gps北斗模擬信號發生器挑選的核心注意事項
挑選GNSS衛星信號模擬器時,需結合自身的測試需求、應用場景及預算,綜合考量以下五個核心因素,避免因設備選型不當導致測試效率低下或結果不準確。
3.1 明確測試需求與應用場景
不同的測試需求對模擬器的功能要求差異較大。首先需明確測試對象是單模接收機(如僅支持GPS)還是多模接收機(支持GPS+BDS+GLONASS+Galileo),這決定了模擬器需支持的衛星系統數量。其次,需確定測試場景是靜態測試(如接收機靈敏度、捕獲時間測試)還是動態測試(如車載、艦載、機載場景下的定位精度測試),動態測試要求模擬器具備高精度的軌跡生成與實時參數調整能力。此外,若需進行抗干擾測試或多徑效應測試,則需選擇具備干擾信號生成、多徑模擬功能的高端機型。對于研發階段的接收機測試,建議選擇功能全面、參數可調范圍廣的模擬器;而對于生產線的批量校準,則可選擇操作簡便、穩定性高的專用機型。
3.2 關注信號質量與穩定性
信號質量是模擬器的核心競爭力,直接影響測試結果的可靠性。需重點關注信號的頻譜純度、功率穩定性、相位噪聲等指標。頻譜純度差會導致雜散信號干擾,影響接收機對有用信號的捕獲;功率穩定性不足會導致測試結果出現波動;相位噪聲過大會影響接收機的載波跟蹤精度。SYN5206在信號質量方面表現優異,其相位噪聲在10kHz頻偏處優于-95dBc/Hz,功率穩定度±1dB,能夠為測試提供高質量、穩定的衛星信號。此外,模擬器的長期工作穩定性也不容忽視,需選擇采用高品質元器件、散熱設計合理的設備,避免因設備過熱或元器件老化導致信號參數漂移。
3.3 考量功能擴展性與兼容性
隨著GNSS技術的不斷發展,新的衛星系統(如北斗三號全球系統)、新的信號體制(如GPS L1C/A、L5,BDS B1C、B2a)不斷涌現,模擬器的功能擴展性至關重要。在挑選時,應選擇支持固件升級、模塊擴展的設備,以便未來能夠通過升級支持新的信號體制和測試功能,延長設備的使用壽命。同時,模擬器的軟件兼容性也需重點關注,其控制軟件應支持Windows、Linux等主流操作系統,具備友好的人機交互界面,方便用戶進行場景配置、參數調整和數據導出。此外,軟件還應支持與第三方測試工具(如接收機測試軟件、數據分析軟件)的聯動,實現測試流程的自動化。
3.4 平衡性能與預算
GNSS衛星信號模擬器的價格差異較大,從幾萬元到幾百萬元不等,需在性能與預算之間找到平衡點。對于中小規模企業或實驗室,若測試需求較為基礎(如單模接收機的靜態參數測試),可選擇性價比高的入門級機型;若需進行多模、多場景、高精度的復雜測試,則需投入較高預算選擇高端機型。在預算有限的情況下,可優先保證核心指標(如信號質量、時間基準精度)滿足需求,對于非核心功能(如多通道擴展、復雜干擾模擬)可根據未來需求逐步升級。同時,需考慮設備的使用成本,如耗材更換、電費、維護費用等,選擇能耗低、維護簡便的設備。
審核編輯 黃宇
-
gps
+關注
關注
22文章
3039瀏覽量
173709 -
衛星
+關注
關注
18文章
1870瀏覽量
70236 -
模擬器
+關注
關注
2文章
1014瀏覽量
45731
發布評論請先 登錄
GNSS衛星導航模擬器的功能與應用介紹,gnss導航模擬器,gnss衛星模擬器










 工商網監
工商網監
評論