 IGH EtherCAT 主站上 ARMxy的真實表現:穩定、快到離譜
IGH EtherCAT 主站上 ARMxy的真實表現:穩定、快到離譜

一、EtherCAT 是什么?一個精妙的比喻
首先,忘掉傳統網絡的想法。您可以這樣想象:傳統以太網(如TCP/IP):就像郵差給一棟公寓樓的每家每戶送信。郵差需要走到每一戶門口(節點),敲門,等待,把信(數據)交給住戶。效率低,延遲高。
EtherCAT:就像一列高速行駛的“數據火車”。這列火車只有一個車頭(主站),它沿著軌道(網絡)飛馳。每個站臺(從站設備)都有一個工人,當火車經過時,工人以閃電般的速度:
取走車上指定給自己的“貨物”(輸出數據/指令)。
放上自己要發送的“貨物”(輸入數據/狀態)。 火車在整個環線上跑一圈回到車頭時,所有數據的交換就完成了。
這個“數據火車”的機制,就是 EtherCAT 高性能的核心。

二、EtherCAT 的核心優勢
基于上述原理,EtherCAT 帶來了革命性的優勢:
極致的速度與超低延遲
數據:更新1000個數字量I/O的時間小于30微秒(μs)。更新100個伺服軸的位置指令只需100微秒。這比傳統的現場總線(如Profibus, DeviceNet)快數十甚至數百倍。
極高的同步精度
技術:內置分布式時鐘機制,可以校準網絡中所有從站的本地時鐘。
效果:可以實現納秒級的同步精度。這意味著網絡上成百上千個設備(如伺服驅動器)可以像同一個大腦指揮一樣,實現絕對同步的動作。
出色的靈活性與拓撲結構
支持線型、樹型、星型、環型等多種拓撲,使用標準的以太網線纜(如CAT5e)和連接器。現場布線極其方便,無需昂貴的交換機。
極高的帶寬利用率
由于數據幀不需要在每個節點被接收、解包、再打包,而是“穿行而過”,有效數據帶寬利用率高達90%以上,遠高于傳統以太網。
顯著的成本效益
硬件成本:從站設備控制器芯片成本低。
布線成本:使用標準以太網線,拓撲靈活,節省大量線纜和接線工時。
集成成本:無需額外的網絡硬件(如交換機),系統結構簡單。
開放性與互操作性
由EtherCAT技術協會(ETG)管理,是一個開放的國際標準(IEC 61158)。確保了不同廠商的設備可以無縫集成,用戶不會被單一供應商綁定
三、EtherCAT 在工業上的主要用途
EtherCAT 是現代高性能自動化系統的“神經系統”,主要應用于:
高性能運動控制:控制幾十甚至上百個伺服電機,實現復雜的協同運動。
實時數據采集:與視覺系統、測量傳感器等高速設備通信。
安全系統:通過Safety over EtherCAT (FSoE)協議,將標準控制和安全功能集成在同一根網線上。
四、多個實際應用場景例子
運動控制與機器人領域
六軸/七軸工業機器人
場景描述:用于焊接、搬運、噴涂、裝配的關節機器人。
EtherCAT優勢:極低的循環周期(<1ms)和納秒級的同步精度,確保所有關節軸嚴格同步運動,實現末端執行器平滑、精確的軌跡控制。
Delta并聯機器人(蜘蛛手)
場景描述:在包裝、食品行業進行高速分揀和取放作業。
EtherCAT優勢:極高的刷新率(可達500μs)和確定性延遲,使機器人能夠以每分鐘數百次的速度精準抓取運動中的物體。
SCARA機器人
場景描述:在電子行業進行高速、高精度的平面定位作業,如芯片插裝。
EtherCAT優勢:快速響應和同步控制,實現XY軸和Z軸之間的精準配合,提升生產節拍。
協作機器人
場景描述:與人類在共享工作空間中協同作業。
EtherCAT優勢:除了高性能運動控制,還能通過Safety over EtherCAT集成安全功能(如力覺反饋、區域監控),在同一根網線上實現功能安全和標準控制。
CNC數控機床(五軸聯動)
場景描述:用于航空航天、模具加工的高精度銑削、車削中心。
EtherCAT優勢:多軸納米級插補和絕對同步,確保復雜曲面加工的精度和表面光潔度。電子齒輪/電子凸輪功能簡化了機械結構。
金屬板材激光切割/焊接機
場景描述:高功率激光設備對金屬板材進行二維或三維加工。
EtherCAT優勢:高帶寬允許將高分辨率的加工路徑數據實時傳輸給驅動器,并與激光功率控制嚴格同步,實現切割速度和切口質量的完美控制。
木工加工中心
場景描述:用于家具制造,執行雕刻、開料、打孔等復雜工序。
EtherCAT優勢:靈活的網絡拓撲便于連接多個主軸、鋸片和大量I/O(氣動夾具、真空吸附),實現快速工具切換和復雜工藝流程。
包裝、物料搬運與物流
高速枕式包裝機
場景描述:對糖果、餅干等產品進行連續式包裝。
EtherCAT優勢:通過電子凸輪功能,實現送膜、成型、封切、打碼等工位的嚴格同步,更換產品時只需更改參數,無需更換機械零件,極大提高靈活性。
灌裝與旋蓋生產線
場景描述:飲料、制藥行業的液體灌裝和容器封蓋。
EtherCAT優勢:將灌裝泵的流量控制、旋蓋電機的扭矩控制與傳送帶伺服主軸同步,確保灌裝精度和封蓋質量,同時通過IP67接口模塊減少控制柜數量。
自動化立體倉庫(AS/RS)
場景描述:堆垛機在立體貨架中高速穿梭存取貨物。
EtherCAT優勢:對行走、升降、貨叉三個伺服軸進行精準同步定位控制,實現高速、平穩、低沖擊的運行,提升倉庫吞吐效率。
交叉帶分揀機
場景描述:在快遞、物流中心分揀包裹。
EtherCAT優勢:主PLC通過EtherCAT控制上百個分揀小車的伺服驅動器,精確控制每個小車在指定格口彈出包裹,系統延遲極低,分揀準確率高。
半導體、電子與精密制造
半導體貼片機
場景描述:將微小的電子元件貼裝到PCB板上。
EtherCAT優勢:極低的通信抖動(<1μs)確保運動平臺與視覺相機、吸嘴之間的絕對同步,實現微米級的貼裝精度和極高的產能(CPH)。
PCB鉆孔機/飛針測試機
場景描述:在電路板上鉆孔或進行電氣測試。
EtherCAT優勢:高帶寬和確定性,確保海量的鉆孔坐標或測試點數據能夠實時、無延遲地送達驅動器,實現高速高精度定位。
晶圓搬運機器人
場景描述:在真空或潔凈室環境下傳輸硅片。
EtherCAT優勢:平滑的運動控制避免振動,防止脆弱的晶圓破損。線型拓撲簡化了真空腔體內的布線。
線束加工機
場景描述:自動完成電線的切割、剝皮、壓接端子。
EtherCAT優勢:將送線伺服、旋轉刀片伺服、端子機控制等集成在同一個網絡中,實現高速、多品種的柔性生產。
過程工業與重型機械
塑料注塑機
場景描述:通過合模、注射、保壓等工序生產塑料制品。
EtherCAT優勢:將伺服泵控制系統、溫度控制器、IO-Link主站集成,實現對注射速度、壓力和溫度的精確閉環控制,節能并提高產品質量。
橡膠輪胎成型機
場景描述:將多層橡膠、簾布等材料復合形成生胎。
EtherCAT優勢:同步控制多個供料架、貼合頭和主軸,確保材料鋪設的精度和均勻性,同時記錄所有工藝數據用于質量追溯。
印刷機械(報紙/包裝印刷)
場景描述:多色組連續印刷。
EtherCAT優勢:分布式時鐘確保各印刷單元間達到微米級的套印精度,避免重影和色差。無硬件交換機,系統更可靠。
風電設備主控系統
場景描述:大型風力發電機的控制。
EtherCAT優勢:通過光纖環網連接機艙頂部和底部的多個控制器、變槳系統和傳感器,實現長距離(最遠100m between nodes)、高抗干擾的可靠通信。
測試測量與特殊應用
汽車模擬器與測試臺架
場景描述:用于車輛動力學仿真或零部件耐久性測試。
EtherCAT優勢:硬實時性能與仿真模型(如Simulink Real-Time)完美結合,精確同步控制多個液壓或電動伺服作動筒,模擬真實的道路載荷。
3D坐標測量機
場景描述:對工件進行高精度三維尺寸測量。
EtherCAT優勢:高分辨率的位置反饋通過EtherCAT實時傳回,結合精確的觸發信號,確保測量數據的準確性和重復性。
舞臺機械與特效設備
場景描述:控制劇院中升降舞臺、移動屏幕、燈光位置。
EtherCAT優勢:多軸同步實現復雜、流暢的群體動作。開放協議便于與第三方演出控制系統集成,實現精準的聲光電同步。
大型3D打印機(增材制造)
場景描述:工業級的大尺寸、多材料3D打印設備。
EtherCAT優勢:同步控制多個打印頭、移動軸和輔助設備(如加熱床),確保打印路徑的精確和不同材料的協同擠出。
智能農業機械
場景描述:大型聯合收割機或播種機。
EtherCAT優勢:通過IP67等級的從站模塊,將分布廣泛的傳感器(流量、濕度、產量)和執行器(閥門、電機)可靠地連接起來,實現精準農業和自動駕駛。
總結:其實總結ethercat在運動控制和同步運動和控制方面有較為突出的優勢,主要就是這種方向,可以自行去挖掘這方面需求的用戶
五、ARM XY 搭載IGHEtherCAT主站作用
EtherCAT 主站是網絡中唯一主動發起通信的控制器。它的核心作用可以概括為:組織、調度、同步和管理整個 EtherCAT 網絡的數據流和設備狀態。
1、數據幀的發起與終結
主站是網絡中唯一生成和發送初始 EtherCAT 數據幀的設備。這個幀會依次穿過所有從站。
當幀經過所有從站并返回主站時,主站負責讀取和處理幀中包含的所有輸入數據。
2、網絡周期的主時鐘
主站擁有系統的主時鐘,并通過分布式時鐘(DC)機制來精確校準所有從站的本地時鐘。
這是實現納秒級同步精度的基礎,確保了網絡上成百上千個設備能在同一時間基準下工作。
3、過程數據映射的管理者
主站負責定義和管理過程數據映射。這是一個虛擬的數據區域,主站將每個從站的輸入和輸出數據在內存中分配到特定的地址。
在每個通信周期中,主站會自動將輸出數據打包到數據幀的對應位置,并從幀的對應位置解析出輸入數據。對用戶程序來說,這就像在讀寫本地內存一樣簡單。
4、網絡狀態機的主控者
EtherCAT 網絡有一個明確的狀態機:Init -> Pre-Operational -> Safe-Operational -> Operational。
主站負責控制和推進所有從站的狀態。只有在“Operational”狀態下,才能進行過程數據的循環通信。
5、從站的配置與診斷
主站在上電或運行時,會讀取每個從站的ESI文件,了解其身份和功能。
主站負責配置從站的參數(如分布式時鐘、同步管理器等)。
主站持續監控網絡狀態,實時診斷通信錯誤、從站丟失或看門狗超時等故障,并做出響應。
六、ARM XY 上IGHEtherCAT主站使用方法
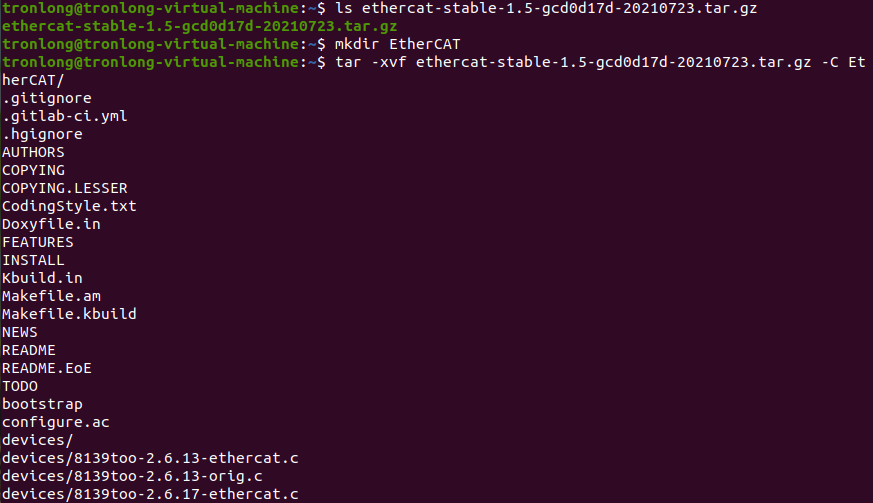
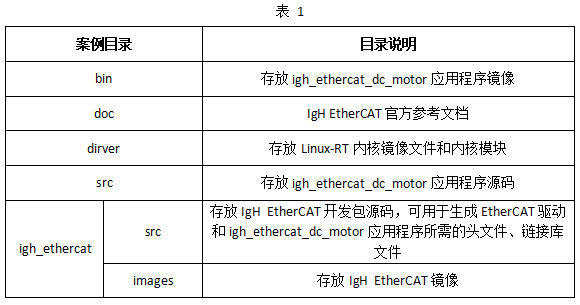
說明:目前igh ethercat最新版是1.6.8,使用比較廣泛的是1.5.2版本,目前這兩種版本我們都支持,如果需要其他版本都可以移植,以1.6.8版本為例(已經交叉編譯過的ethercat主站程序):

注意是必須是RT linux內核,以T507為例子,將編譯好的master驅動模塊和網卡驅動模塊分別加載進內核,MAC地址為eth1網卡地址,注意加載的先后順序,然后設置庫的環境變量,如果已經將庫放入/usr/lib這種已經包含的系統環境變量目錄里面則省略。因為我已經提前將設備連接,這時已經掃描到了從站0,處于PREOP的預操作狀態,需要用戶自行根據ESI文件去做PDO過程數據分配操作。

根據從站的twincCAT的ESI配置文件,可以調用igh ethercat的接口

配置PDO,和ESI文件一致

調用一些基礎的接口做一些初始化操作,并使用RT linux的API接口將任務優先級提高

在主循環中檢測輸入開關的變化,控制從站兩個LED燈的開和熄滅(程序邏輯為檢測輸入IO,接通打開燈,斷開關閉燈)。交叉編譯程序后上傳到我們的ARM XY上運行現象如下
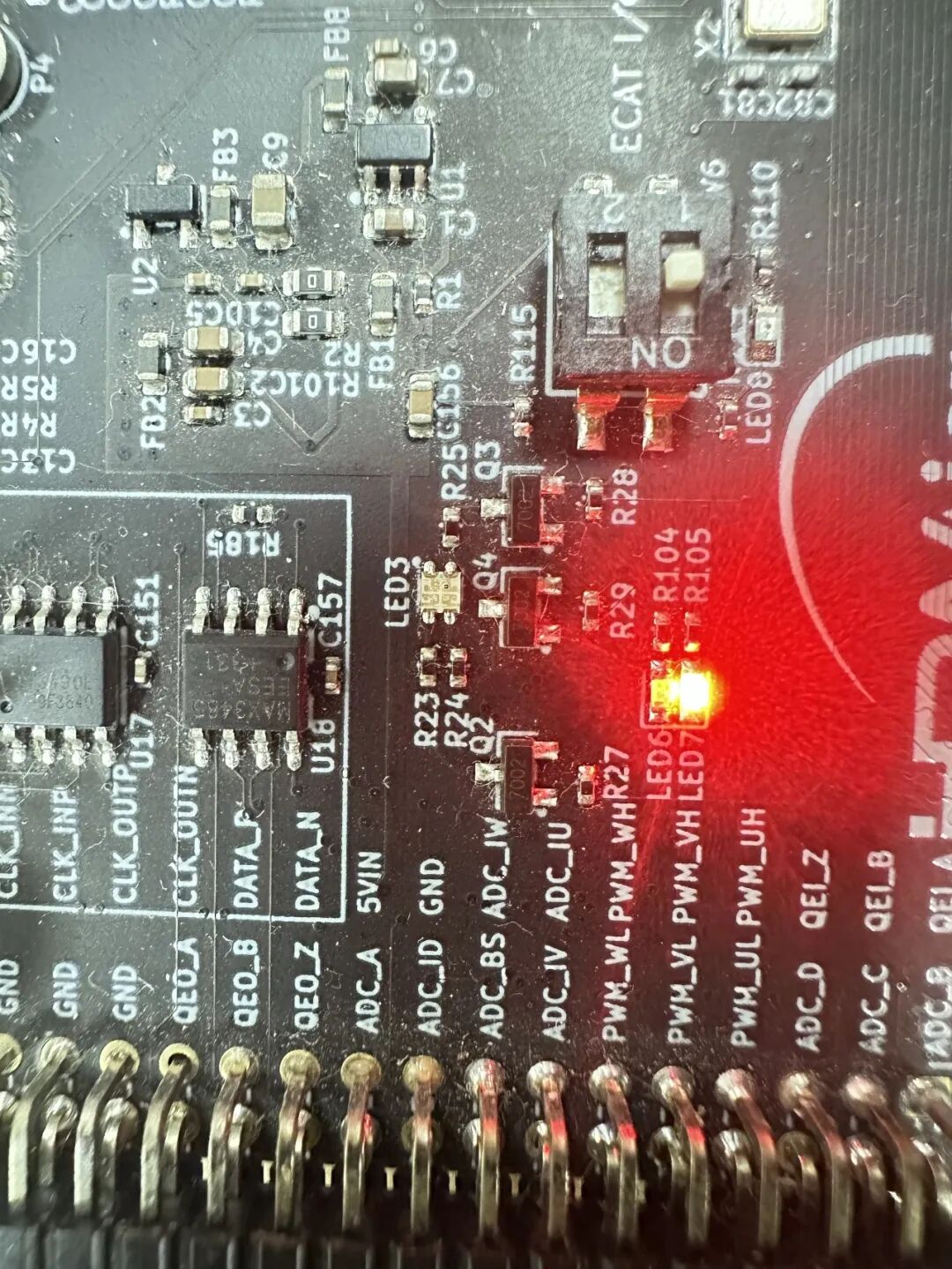

現象:可以看到開關在不在ON的時候兩個燈都是熄滅的,在開關在ON的時候兩個燈都為打開狀態。
七、BL217從站
略...
目前從站耦合器也已經完成,使用BL210系列的相同的IO模塊,說明文檔另行查閱或詢問測試人員
?
審核編輯 黃宇
-
plc
+關注
關注
5051文章
14594瀏覽量
486892 -
ethercat
+關注
關注
19文章
1508瀏覽量
45183
發布評論請先 登錄
拒絕卡頓,觸覺智能RK3562核心板成功實現2秒級疾速啟動,響應快到離譜!

DR1M90 開源 IgH EtherCAT 主站案例:伺服電機正反轉實時控制方案
深度解析 | 低抖動高精度EtherCAT多軸控制的實現與實踐案例
基于BL350與IGH?EtherCAT的硬實時控制解決方案
ARMxy控制器 + IGH EtherCAT:50大實時控制場景,賦能工業4.0柔性制造
【米爾RK3506國產開發板評測】3、實時補丁以及EtherCAT IGH移植
創龍 瑞芯微 RK3588 國產2.4GHz八核 工業開發板—IgH?EtherCAT主站開發案例(下)
創龍 瑞芯微 RK3588 國產2.4GHz八核 工業開發板—IgH?EtherCAT主站開發案例(上)
如何米爾RK3576開發板上移植EtherCAT Igh
【米爾NXP i.MX 91開發板評測】移植運行IGH EtherCAT主站
國產!全志T113-i 雙核Cortex-A7@1.2GHz 工業開發板—IgH EtherCAT主站開發案例
【米爾RK3576開發板免費體驗】3、移植EtherCAT Igh
讓電磁閥“聽懂”EtherCAT:耐達訊CAN轉EtherCAT網關
基于米爾安路飛龍派FPGA FPSoC+移植SOEM實現EtherCAT主站控制功能
禾川伺服驅動器與EtherCAT主站轉Profinet網關的雙向數據交換




 工商網監
工商網監
評論