 UWB定位技術原理:亞米級定位的實現邏輯詳解
UWB定位技術原理:亞米級定位的實現邏輯詳解

UWB全稱叫Ultra-Wideband,中文直譯為”超寬帶”,不同于之前我們說過的藍牙信標是依賴信號強度(RSSI)距離估算,UWB通過納秒級的窄脈沖傳輸數據,時間分辨率高,為亞米級定位精度奠定了基礎,本文就其精度的實現邏輯從核心特性、核心原理兩方面展開詳細論述。
一、UWB定位技術原理的核心特性
亞米級定位精度的本質源于UWB信號本身的物理特性,它與傳統的無線定位技術有三方面的核心區別。
1. 脈沖信號特性
UWB具有“寬頻譜、短脈沖”的特點,具體表現為它不使用連續的載波信號,而是發射納秒級(1ns=10??秒)的極窄脈沖,脈沖帶寬超500MHz,((或占中心頻率的20% 以上,滿足 FCC 對 UWB 的頻譜定義))使它具備極強的時間分辨率,能夠精準捕捉信號傳播的微小時間差,提供距離測量的基礎。
2.抗干擾性和穿透性
抗干擾性上,寬頻譜的特性能讓UWB信號避開WiFi、藍牙等窄帶信號帶來的干擾;穿透性上,極窄脈沖的穿透力比傳統無線信號更強,可以穿透墻壁、家具等障礙物,減少室內復雜環境對定位的影響。
3.低功耗和低延遲
低功耗上,UWB脈沖的峰值功率低,能量集中,使其設備發射脈沖時功耗低;低延遲上,脈沖傳輸時是納秒級,延遲短,適合對實時定位要求高的場景。
二、UWB定位技術原理的核心原理
核心邏輯是信號測量目標與基站的距離-通過多基站協同就算目標的三維/二維坐標,關鍵有兩步。
1. 三種核心測量距離的方式
(1)飛行時間法(TOF):核心原理是測量信號從基站到標簽的單程傳播時間,距離=光速x傳播時間,原理簡單,響應快,適用于基站與標簽時鐘同步性好的場景。
(2)到達時間差法(TDOA):核心原理是多個基站同時發射信號,標簽測量信號到達不同基站的時間差,結合基站坐標,通過時差反推算出距離差解算位置,這種測量方式不需要標簽與基站同步,標簽的功耗極低,適用于大規模的商場、機場定位。
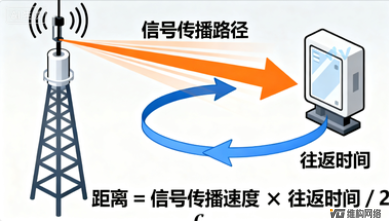
(3)雙向測距法(TWR):核心原理是標簽與基站雙向發送脈沖,測量信號的往返距離通過公式“距離=(光速x往返時間)/2,”解算具體位置,不需要時鐘同步,測量精度高,適合工業場景、多遮擋車間等復雜環境。
2.定位算法對位置進行解算
當標簽通過上述方式獲得3個級以上基站的距離后,系統會通過定位算法解算標簽的具體位置。
(1)二維定位:至少需要三個基站。以每個基站為圓心,測量距離為半徑畫圓,三個圓的交點即為標簽的二維坐標(x,y);如果采用到達距離差(TDOA),通過“距離差方程”求解交點。
(2)三維定位:至少需要四個基站。在二維基礎上增加高度(z軸)的維度,通過四個基站的距離數據解算三維坐標(x,y,z),適用于立體倉庫、礦井等需要高度定位的場景。
(3)算法優化:結合卡爾曼濾波、粒子濾波等算法對原始數據進行平滑處理,減少遮擋、信號反射帶來的誤差,提升定位的穩定性。
當然UWB定位的精度邊界不是絕對的,無遮擋、基站布局合理的理想環境下,UWB精度可達0.1米,但室內遮擋、多路徑反射會導致誤差增大,實際布局合理、遮擋較少的場景一般是0.3到0.5米。上述UWB定位技術的特性,使它成為工業、安防、醫療等高精度需求場景的首選方案,而UWB于藍牙的互補性,也讓室內定位領域形成了UWB+藍牙的融合方案,兼顧精度與成本。
如果您想進一步了解定位的技術和案例,歡迎關注、評論留言~
審核編輯 黃宇
-
UWB定位技術
+關注
關注
1文章
41瀏覽量
1824
發布評論請先 登錄
工廠人員精準定位:技術落地入門剛需指南(包括核心痛點、技術邏輯、產品亮點)
北斗衛星導航定位技術從核心誤差修正方法、不同定位模式到工業場景融合應用詳解(二)
室內外融合定位技術從核心架構、技術原理到部署實施流程等詳解(三)
工廠人員定位卡從技術原理、功能與技術實現、選型指南詳解(一)

藍牙定位技術原理:從BLE信號到高精度定位的實現邏輯
UWB模塊定位不夠精準?-原因可能出在天線延遲上
飛睿智能UWB技術融合TAG防丟器,厘米級定位高效精準尋物

UWB - TDOA方案定位技術
厘米級精準定位+低功耗通信,飛睿智能UWB技術賦能機器人高效作業

厘米級精準定位+低功耗通信,飛睿智能UWB技術賦能機器人高效作業

飛睿智能深度解析,UWB超寬帶定位測距技術及其適用場景

思為無線UWB定位測距模塊簡介--厘米級精準定位

UWB單基站360°測距定位400米,二維測距定位解決方案



 工商網監
工商網監
評論