 AMD利用可重構FPGA設備Moku實現自定義激光探測解決方案
AMD利用可重構FPGA設備Moku實現自定義激光探測解決方案

摘要
本文介紹了Advanced Micro Devices, AMD公司如何基于可重構FPGA設備自定義激光探測解決方案,替代傳統的儀器配置,通過靈活且可定制的FPGA設備Moku提供更高效和靈活的激光探測技術。文中結合多個案例研究探討了使用Moku平臺簡化實驗設置、部署鎖相放大器和雙boxcar平均器提升信號質量、并通過Moku的神經網絡及云編譯功能優化實時信號處理。Moku將信號生成、測試分析、控制調節等多種功能集成于一臺設備,支持用戶快速部署自定義HDL代碼,該方案集成度高、硬件投資成本低、配置簡潔,且支持高度自定義和先進的信號處理技術。
01
引言
目前,激光探測(laser probe, LP)技術及其衍生應用的整合通常高度依賴原始設備制造商(original equipment manufacturer , OEM)提供的解決方案。然而,這些整體方案普遍缺乏靈活度與泛化性,并且通常存在知識產權等方面的限制,與供應商之間協調所需的法律和財務流程通常復雜且耗時,這不僅極大地阻礙了企業實際生產中技術創新的進程,也影響科研院所之間在該領域的研究合作。FPGA(現場可編程門陣列)是一種可由用戶編程和重新配置的集成電路,適用于高速并行處理和實時數據處理應用。現代FPGA通常集成硬件和軟件IP核心,增強了其功能,支持嵌入式處理器、射頻信號處理和AI加速等應用。FPGA的部分重構能力使得用戶能夠構建低延遲、定制的測試配置,簡化布線并減少信號損耗。此外,FPGA支持動態熱插拔,允許在不干擾其他儀器的情況下添加或刪除功能。
昊量光電代理的Liquid Instruments的Moku設備是一款基于FPGA技術開發的高性能測試測量平臺,集成了多達15種專業測試測量儀器功能,如示波器、鎖相放大器、信號發生器等。其采用先進的ADC混合技術,顯著提升了設備底噪性能,確保了更加精確的測量結果,尤其低頻噪聲表現出色。Moku支持多儀器并行,能夠同時運行最多八個儀器,儀器間在時鐘總線上高度同步,減少額外的噪聲并提高了實驗效率。這種高度集成的設計大大簡化了實驗配置,減少了硬件連接復雜度,同時提升了信號處理的可靠性。此外,Moku的云編譯功能,即可編程特性讓用戶可以根據具體需求定制儀器功能和測試流程,無論是在實時數據處理、波形生成,還是在信號分析與實時處理中,都能靈活應對各種挑戰。通過軟件定義儀器的方式,Moku為激光測探技術提供了易于操作、精準靈活、可自定義的解決方案。
在本文中,我們將通過多個案例研究,展示基于Moku實現的可重構集成方案及其相較于傳統方式的改進之處。首先,我們將介紹頻域映射的兩種替代實現方式,通過一臺Moku替代傳統方案中使用多臺儀器的復雜設置:一種是使用Moku的鎖相放大器,可直接在本地振蕩器和鎖相環之間直接切換,輸出高信噪比信號,減小掃描區域并提升掃描速度;另一種是使用Moku的Python API及云編譯功能實時部署雙boxcar平均器,輕松在更復雜背景噪聲下捕獲門控窗口內的所有信號分量。隨后,我們將探討如何使用雙boxcar平均器實現該方法。之后,我們會提供一種基于Moku鎖相放大器的定制解決方案,以提高信號質量。最后,我們將研究人工智能,特別是通過Moku提供的神經網絡(neural network, NN)功能,在實時信號處理過程中改進激光探針信號采集的應用方案。本文介紹的解決方案能夠與任何配備低噪聲激光和適當帶寬探測器的商用激光掃描顯微鏡(laser scanning microscope, LSM)兼容。如圖1所示,大多數商用LSM都至少提供一個光子探測器輸出,它能將被測件(device under test, DUT)的電激勵反射以電信號形式傳輸出來;一個用于將信號轉換為灰度圖像像素的模擬輔助輸入;以及一個用于激光系統同步的外部同步輸入。

圖1:商用激光掃描顯微的外部輸入/輸出接口,采用默認的激光探測和頻域映射配置。
LSM廠商默認提供的低頻和中頻配置通常需要與示波器和頻譜分析儀等獨立儀器搭配使用,以實現相應的技術。如時域映射的實現還需要一個具有boxcar平均功能的鎖相放大器,這通常作為附加選項提供。基于Moku的可重構集成方案將大大簡化這一設置,只需要一個可重構FPGA設備,即Moku,和兩個物理連接:一個連接到光子探測器輸出,另一個連接到模擬輔助輸入,如圖2所示。在這種配置下,由于LSM軟件的限制,不會使用激光同步。一旦硬件連接建立,這些儀器可以完全通過軟件界面進行切換。接下來我們將更詳細地討如何通過Moku實現可自定義的激光探測方案。

圖2:與原始設備制造商的默認配置相比,簡化了激光探測技術的實現(已劃掉部分)。部署單個可重構FPGA設備Moku可以取代所有三個獨立的測量儀器(頻譜分析儀、示波器和鎖相放大器)。
02
頻域映射解決方案
頻域映射通常用于將激光圖像與模具布局對齊以及確保精準聚焦,這一技術對于實現最佳的信號采集至關重要。首先,我們使用可重構FPGA設備Moku上部署的軟件定義鎖相放大器來實現頻域映射。該鎖相放大器提供了可以生成與DUT同步脈沖信號精確對齊的正弦波的鎖相環(phase-locked loop, PLL)。如圖3所示,如果需要相位信息,可以將DUT同步脈沖直接連接到Moku;否則,使用內部振蕩器就足夠了。具體配置需要在內部振蕩器或PLL模塊中設置所需的實驗頻率,并選擇直角或極坐標系輸出,這取決于是否需要相位信息或是否僅需要解調幅度的頻域映射,如圖4所示。最終輸出的結果是具有高信噪比(signal-to-noise ratio, SNR)的頻域映射信號,本方法支持快速掃描,并減少了掃描區域。

圖3:可重構FPGA設備與LSM之間的物理硬件連接

圖4:用于頻率映射技術的Moku鎖相放大器配置。可在本地振蕩器和鎖相環之間切換,以輸出幅度或相位信息。因此,通過觀察實時的頻域映射掃描結果來實時調整光學焦點,可以實現最佳的光學聚焦效果。圖5(上部)展示了在聚焦操作過程中捕獲的連續頻域映射圖像。要達到最佳聚焦效果,P型和N型活躍區域都必須呈現出其全局的最大對比度值。在圖5(下部)中,給出了從圖5(上部)虛線矩形區域繪制的對比度圖。該圖定量地描繪了P型和N型活躍區域的對比度變化。圖像編號4符合最佳聚焦的標準,因為它展示的P型和N型活躍區域都具有全局最大的對比度。這種統計方法在未來的自動化流程中具有潛在的應用價值。

圖5:焦距調節過程中的頻域映射圖像序列。圖像編號4的聚焦效果最佳。
應當指出的是,當目標頻率是周期性的(例如時鐘信號或基于HHLL的扁平化掃描信號)且占空比約為 50% 時,頻域映射性能達到最佳。偏離50%的占空比會引入額外的諧波,對系統性能產生負面影響,并降低整體信噪比。
另外,利用軟件定義的雙boxcar平均器(Moku提供了Python API控制面板以及云編譯部署控制實現該功能)也可以實現頻域映射。在時域中,基線boxcar設置在時鐘信號的零電平位置,脈沖boxcar設置有效時鐘位置,如圖6所示。根據測試模式的長度、頻率和允許的激光功率,在超過2000次的平均下,雙boxcar平均器能獲得良好的信噪比,并且可以實現較快的掃描速率。圖7展示了不同頻域映射實現方式所獲得結果的比較。總體而言,與鎖相放大器方法相比,當背景信號更復雜時,如圖8所示,它捕獲了門控窗口內的所有信號分量,而鎖相放大器方法僅捕獲目標頻率處的信號分量。用戶可以根據其具體目標選擇合適的頻域映射方法。

圖6:藍色線條表示無時鐘信號向量的顯示波形。
紅色線條表示存在有效時鐘信號向量的顯示波形。黃色陰影區域分別是基線boxcar(較低)和脈沖boxcar(較高)。

圖7:不同頻域映射實現方式的對比圖

圖8:采用雙boxcar平均器得到的頻域映射結果往往比使用鎖相放大器得到的結果更為豐富。
03
時域映射解決方案
使用可重構FPGA設備Moku來實現時域映射的解決方案時,無需對圖3所示的硬件連接進行任何更改,僅將部署的軟件定義儀器從鎖相放大器切換到雙boxcar平均器模塊即可。配置脈沖boxcar來捕獲所需信號的位置以及基線boxcar在沒有信號的位置。最后,將激光像素延遲與boxcar平均時間對齊,如圖9所示。

圖9:時域映射的時域波形圖示例。觸發信號(藍色)由測試設備提供。基線boxcar(低的黃線)設置在無信號的位置,而脈沖boxcar(高的黃線)則設置在需要捕獲信號的位置。時域映射在追蹤非周期性信號或低占空比周期性信號(例如由壓縮掃描模式生成的信號)的晶體管時域動態特性方面特別有效。圖10展示了將時域調制應用于待測試的掃描單元的情況,其中輸入緩沖器位于SI處,輸出緩沖器位于SO處。從掃描單元的輸出部分開始檢測到缺失的時域映射信號,并一直延伸到SO緩沖器B。使用激光探測進一步檢查這一異常情況,發現掃描單元的輸出出現了不隨激勵信號翻轉的現象。

圖10:正常元件和故障元件上顯示的時域映射結果圖像。
對比正常元件,故障元件上從掃描單元輸出區到輸出緩沖器B的時域映射信號缺失。故障元件的激光探測信號在掃描單元輸出處用“+”標記,表明其出現輸出不隨激勵信號翻轉的現象。時域映射還在探針精確定位方面表現出了極大的價值,它提供了一種比耗時的傳統多點采集方法更快的替代方案,并且能夠緩解當探測激光波長與成像激光波長不一致時所導致的問題。然而,時域映射的處理速度本質上較慢,需要至少三個數量級的平均周期。通常,時域映射是使用一個縮小的掃描窗口來執行的,建議優化測試圖案的長度獲得最大效率。
04
自定義解決方案示例—移動平均濾波器
接下來,我們將具體展示如何通過在Moku上部署一種定制解決方案來滿足特定的測量需求。具體而言,我們通過Moku的多儀器并行模式,同時部署了鎖相放大器與自定義的實時移動平均濾波器,通過它們協同工作實現簡易的頻域映射方案。在多儀器并行模式下,用戶可以部署最多8種儀器同時運行,根據實驗需求,用戶可以靈活配置所需儀器,且儀器在時鐘總線上高度同步。如圖11所示,該實現方式所需的自定義算法通過云編譯模塊部署。本方案使用的兩個儀器之間的數據交互與同步,通過FPGA的內部互連結構進行配置儀器之間無需額外任何物理連線,從而確保低延時信號傳輸。
移動平均濾波器的實現原理由以下公式給出

其中,x(t) 為離散時間序列輸入信號,y(t) 為輸出信號,n 為連續信號的樣本數量。該方程通過HDL代碼實現,并編譯成比特流文件,然后即可通過云編譯器進行部署。

圖11:Moku多儀器并行的串聯配置。鎖相放大器的輸出A被連接到云編譯器的輸入A,該云編譯器部署了移動平均濾波器的自定義算法。
這種濾波器計算量較小,僅需要一個累加器、一個減法器和一個移位運算。因此,它時延非常低,非常適合實時應用。如圖12的實際測量結果所示,示例中實現的移動平均濾波器的輸入與輸出之間的延遲量測量值為 224納秒,相當于312.5 MHz FPGA的時鐘的70個時鐘周期。

圖12:在基于50MHz FPGA的系統時鐘下,鎖相放大器和移動平均濾波器的輸入與輸出之間的延遲約為222納秒。紅線表示輸入,藍線表示移動平均濾波器的輸出。這種移動平均濾波器能將噪聲幅度降低到原始值的根號下2的n次方倍。在我們的實現中,n = 8,因此噪聲幅度應降低至1/16,即相當于信號幅度增加到其原始值的16倍。在圖13展示的結果中,移動平均濾波器的輸出和輸入分別被測得為360 mV和22 mV,約為16.4倍,符合理論預期。借助移動平均濾波器提供的更高的信噪比,可以降低激光功率,或者通過減少像素停留時間來實現更快的掃描速度,同時保持相當的輸出結果。

圖13:增加移動平均濾波器后輸出與鎖相放大器原始輸出的對比;輸出電壓分別為360 mV和22 mV。
05
基于神經網絡的降噪方案實現
FPGA的可重構和并行處理架構非常適合神經網絡處理。它提供了低延遲的推理性能,適用于各種實時信號處理應用,例如信號降噪、分類和閉環控制。接下來,我們使用自編碼器這類神經網絡來進行信號降噪,并通過Moku將其部署到其他儀器(如示波器、鎖相放大器和boxcar平均器)輸入之前的一級進行前端信號處理。自編碼器是一種神經網絡類型,旨在高效地學習輸入數據的壓縮表示。它通過采用一種網絡架構來將數據壓縮至更小的編碼空間表示,然后將其重構回原始輸入大小,從而完成這一任務。
5.1 自編碼器
在將一串時間序列數據輸入神經網絡之前,會使用一個包含32個數據點的滑動窗口將其轉換為32個并行數據的格式。如圖14所示,我們配置了一個四層的自編碼器。前三層的編碼空間大小分別設置為16-2-16,每層均使用Tanh函數,而最后一層則采用線性函數,解碼后的數據匯聚為單輸出。該自編碼器是使用隨機生成的均值為零、服從正態分布的白噪聲數據進行訓練的。

圖14:一種基于時間數據滑動窗口的四層自編碼器結構。考慮當前使用的FPGA資源劃分,神經網絡的輸入采樣率被設定在305 kSa/s,然而我們的測試設置和激光探頭探測器的帶寬不兼容,一定程度上限制了我們進一步探索。不過,我們還是進行了一系列軟件仿真測試,以研究自編碼器神經網絡的行為。我們將具有正態分布的隨機生成的白噪聲,添加到振幅為 ±0.5 V 的方波中。
5.2 性能評估
為了評估噪聲抑制的性能,我們采用了標準差差異(standard deviation difference, SDD)這一指標,它衡量的是處理后的信號與真實值之間的差異的標準差,而非使用均方誤差(mean square error, MSE)。相比于MSE,SDD在各種場景下能更一致地反映相對真實值的去噪結果。如圖15表明,MS給出的自編碼器性能與中值濾波器相差超過8倍(8.9975 vs 0.9347)。相比之下,SDD能更準確地反映實際性能,這一數據顯示中值濾波器的 SDD 更低(越低越好),低于自動編碼器(0.1551 vs 0.3814)。

圖15:中值濾波器與自編碼器在SDD和MSE評估指標方面的比較。
5.3 偏移補償
在自編碼器的輸出結果中,與真實值相比觀察到有5個數據點的負偏移,如圖16所示。這種偏移僅在仿真環境中明顯可見,因為在仿真中未考慮任何延遲的處理。在實際應用中,這種負偏移通常可以忽略不計,因為儀器的延遲會顯著更長,并且無法獲得用于直接比較的真實數據。在本案例的研究中,我們始終補償了5個數據點的偏移。

圖16:自編碼器有負偏移的原始輸,以及補償后的版本。
5.4 采樣
為了測試自編碼器在不同采樣率或數據密度下的表現情況,我們將采樣率定義為在每個信號脈沖下所采集的樣本數量。在激光探測應用中,采樣率通常設置在每個信號脈沖采集50個到200個樣本之間,以獲得可靠的分辨率用于分析,具體數值取決于測試設置的頻率以及示波器的性能。圖17所示的結果表明,自編碼器的性能在數據密度增加時提升,但到達400個采樣/脈沖時開始趨于穩定。

圖17:不同采樣率下自編碼器的性能。采樣率越低,SDD值越小,性能越好。
5.5 噪聲水平
我們還針對不同的輸入噪聲水平對自編碼器進行了仿真測試。噪聲基于不同標準差下的隨機正態分布定義并生成。圖18的結果表明,自編碼器在低噪聲條件下表現更佳,而當噪聲水平升高時,其表現則開始急劇下降。

圖18:不同噪聲水平下自編碼器的性能表現。*SDD越低越好。
5.6 神經網絡層數
針對自編碼器結構,我們對不同的神經網絡層數和編碼空間大小進行了測試。結果表明,當將編碼空間壓縮至最小允許尺寸(即2)時,自編碼器的表現會更好。隨著神經網絡層數從3層增加到5層,性能也會有所提升,但當層數從5層增加到7層時,性能則會下降。

圖19:不同神經網絡層數和編碼空間大小下自編碼器的性能表現。*SDD越小越好。
5.7 方案對比
在高噪聲輸入環境下,將自編碼器與中值濾波器進行對比測試,測試時采用均值為0、標準差為2的正態分布數據。測試結果表明,中值濾波器的表現明顯優于平均濾波器(噪聲輸入情況)以及自編碼器。

圖20:自編碼器、均值濾波器和中值濾波器性能的比較。
5.8 實驗總結
上述實驗表明,自編碼器在數據密度高且噪聲水平低的情況下能夠表現良好。然而,當輸入的正態分布噪聲標準差超過0.25時,自編碼器不再適合作為前端信號降噪的解決方案。在這種情況下,中值濾波器結合取平均的處理將更為合適,因為它能夠適應更廣泛的輸入數據密度和噪聲水平。未來的研究可以關注其他訓練數據集或反饋神經網絡結構—例如循環神經網絡。
結論
在此,特別感謝AMD工程師Zhi Hao Ko 提供的應用研究及支持。本文通過展示了一種基于單臺自適應 FPGA 設備的激光探測技術的簡易實現方案,并通過實際應用案例進行了驗證。該 FPGA 平臺的功能不僅限于可重構的測試與測量儀器,更可作為高度可定制的信號處理解決方案,滿足多樣化和特定化的測試需求及推動測試測量領域創新發展。
本文所展示的應用實現僅是初步探索,未來該方案不僅可拓展至更復雜的光學故障定位技術,也為更廣泛的失效分析與測試方法提供了新的思路與實現路徑。基于實時神經網絡(Live NN)的概念在信號處理領域依然具有巨大潛力。隨著Moku平臺采用更高性能的 FPGA 架構,系統可進一步提升采樣與處理能力。同時,未來可探索多種神經網絡模型,以在精度與響應速度上實現更優表現。
-
FPGA
+關注
關注
1662文章
22464瀏覽量
637996 -
amd
+關注
關注
25文章
5697瀏覽量
140242 -
激光探測器
+關注
關注
0文章
31瀏覽量
8953
發布評論請先 登錄
HarmonyOS應用自定義鍵盤解決方案
如何利用FPGA設計可重構智能儀器?
USB自定義設備類的實現

自定義視圖組件教程案例
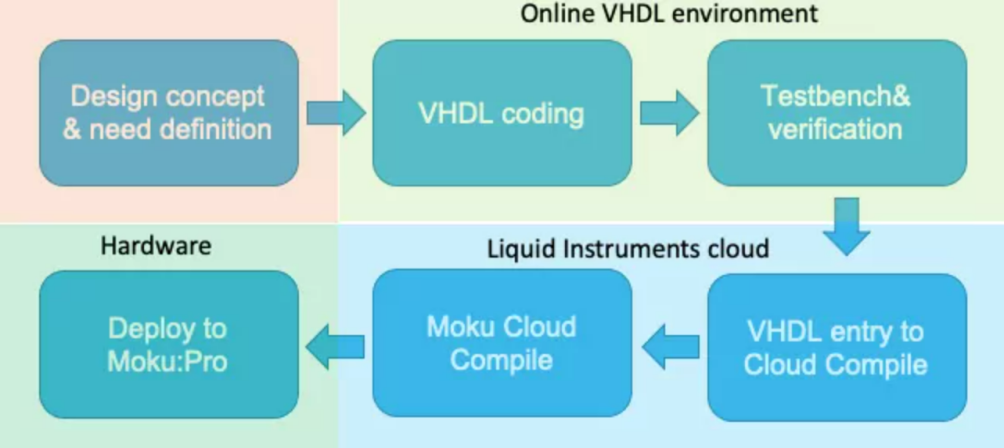
Moku 云編譯介紹
使用基于云自定義IP的解決方案服務設計多媒體解決方案
使用基于IP的云自定義解決方案服務設計多媒體解決方案
Moku: Go推出激光鎖頻/穩頻功能!
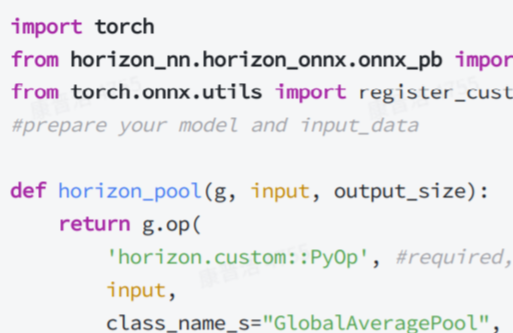
自定義算子開發
創新發布|Moku:Pro云編譯實現用戶自定義儀器測量功能!

智能語音識別照明解決方案,平臺自定義,中英切換




 工商網監
工商網監
評論