 相機分辨率:融合探測器與光學性能
相機分辨率:融合探測器與光學性能

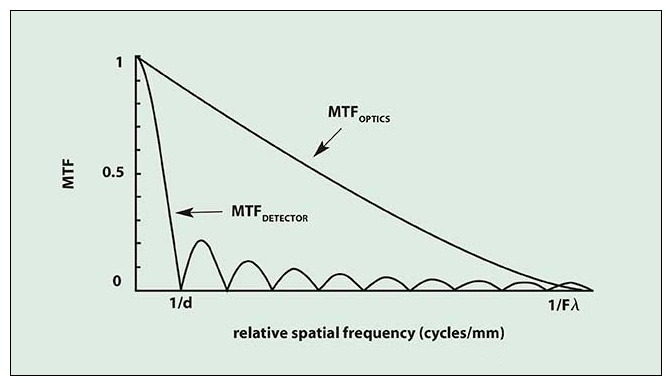
圖1、該系統的調制傳遞函數為 MTFSYS = MTFOPTICS*MTFDETECTOR。由于探測器的調制傳遞函數起著主導作用,所以這是一個受探測器限制的系統(Fλ/d = 0.1)
相機的分辨率取決于光學模糊直徑和探測器的尺寸。Schade將這兩者結合起來,創建了一個等效分辨率,該分辨率與 Fλ/d 有關,其中 F 是焦比,λ 是平均波長,d 是探測器的尺寸。在空間域中,2.44 Fλ/d 是艾里斑直徑與探測器尺寸的比值。在頻率域中,它是探測器截止頻率與光學截止頻率的比值(圖 1)。
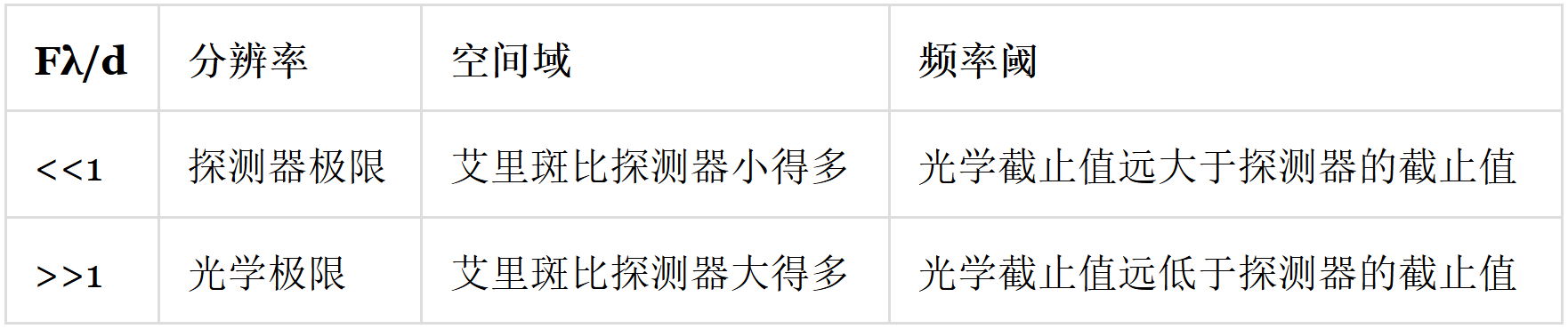
理解這兩種極限情況非常重要(見表 1)。例如,在探測器受限區域工作時,改變孔徑直徑并不會顯著影響分辨率。相反,在光學受限區域工作時,改變探測器尺寸的影響微乎其微。從探測器受限狀態到光學受限狀態的轉變是漸進的,其范圍大致在 0.41 < Fλ/d < 1.0 之間。
表1
探測器受限vs光學受限性能
Schade等效分辨率
Schade提出了“等效分辨率”這一概念。作為一種系統方法,它將光學系統的調制傳遞函數(MTF)與探測器的調制傳遞函數相結合:
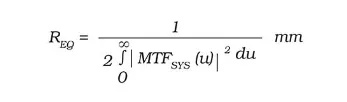
其中 u 是空間頻率變量,其單位為每毫米周期數。通過使用調制傳遞函數的平方,Schade強調了那些調制傳遞函數相對較高的空間頻率。REQ 無法直接測量。它是一種數學構造,用于表示系統分辨率。隨著調制傳遞函數的增加,REQ 降低,分辨率“提高”(數值越小越好)。
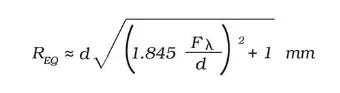
系統分辨率可由子系統等效分辨率估算
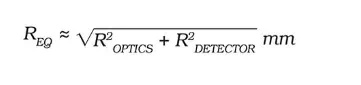
其中 ROPTICS = 1.845 Fλ 且 RDETECTOR = d。這種方法使我們能夠分別分析光學分辨率和探測器分辨率,然后將它們組合成一個系統分辨率。將等效分辨率以以下形式表示會比較方便:
隨著 Fλ/d 的值減小,REQ 接近光限制操作下的 d(即 d = 光學限制操作下的探測器尺寸)。對于較大的 Fλ/d 值,系統會受到光學限制,等效分辨率也會隨之增加。將艾里斑(d = 2.44 Fλ)與探測器尺寸相匹配,會得到一個比實際探測器尺寸大 25% 的等效分辨率(圖 2)。與光限制下的圖像相比,此圖像略顯模糊,但對于某些應用來說可能是可以接受的。在光學限制區域,與光限制下的圖像相比,圖像肯定顯得模糊。
CCD攝像機
在典型的 1/2 英寸格式的 CCD 陣列中,探測器的尺寸約為 10 微米。由于它們在光譜的可見區域工作,平均波長為 0.5 微米。將焦比降低到 2 以下并不會顯著提高分辨率,因為系統處于探測器限制區域(圖 3)。這種數學方法允許出現既不符合物理現實(例如 F = 0)也不切實際(例如 F = 50)的值。我們必須選擇適用的范圍。然而,這些極端值表明了在探測器限制和光學限制區域內的極限性能。
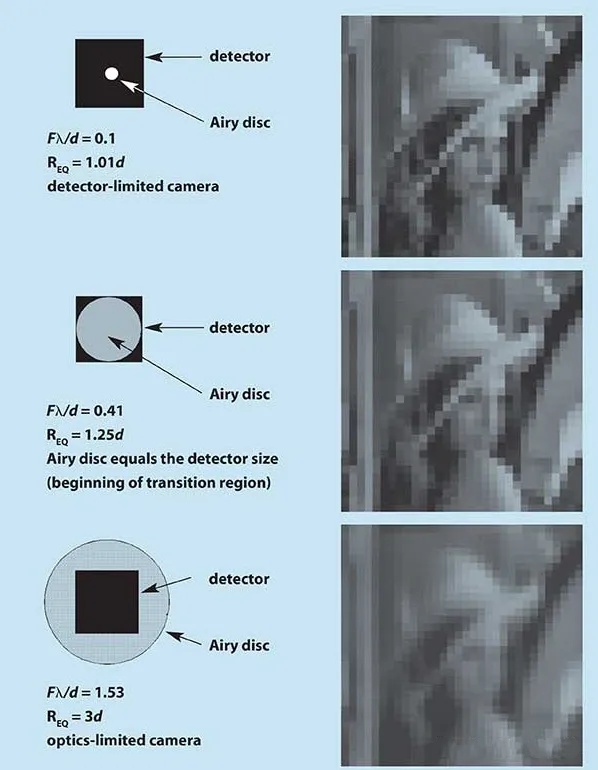
圖 2、由 MAVIISS 創作的針對三種不同 Fλ/d 比例所形成的圖像
熱像儀
例如,以長波紅外(LWIR)相機為例。這種相機的典型探測器尺寸約為 25 微米。在這個光譜窗口中,平均波長為 10 微米。因為當 F = 1.02 時,艾里盤直徑與探測器尺寸相等,所以 LWIR 相機往往受到光學限制(圖 4)。由于波長明顯更長,LWIR 相機無法提供與 CCD 相機相同的分辨率或圖像清晰度。
范圍特性
盡管探測器角間距常被用于計算最大范圍,但它得出的范圍值過于樂觀,因為光學分辨率這一因素并未被考慮在內。作為一項綜合指標,REQ 能比諸如探測器尺寸或模糊直徑等單一指標更有效地反映系統性能。因此,衡量范圍性能的更實際的衡量標準是:
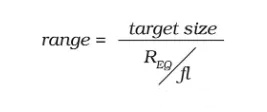
隨著焦比的增大,光學模糊增大,探測距離減小(圖5)。
系統設計
光學設計師可以自行設定光圈直徑和焦距。探測器的尺寸通常只有幾種規格可供選擇,系統設計師也就只能做出有限的選擇。這種系統設計方法能夠將光學元件與探測器組合在一起,使其滿足適當的 Fλ/d 比值要求。盡管我們力求實現衍射極限的光學效果,但在探測器受限區域工作時,這并非是必須的條件。只要模糊直徑小于探測器尺寸,具有最小像差的光學元件就是可以接受的。簡而言之,更好的光學質量未必能帶來更高的分辨率。
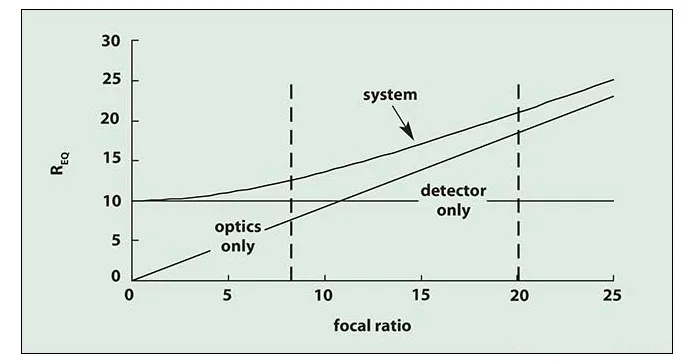
圖 3、對于典型的 1/2 英寸格式 CCD 相機(焦距 d = 10 微米)而言,其等效分辨率情況如下:在 F = 8.2 處(Fλ/d = 0.41)檢測器受限區域位于垂直虛線左側,而在 F = 20 處(Fλ/d = 1.0)則為光學受限區域。在實際光學系統中,最小焦比約為 1.0,而理論極限約為 0.5
然而,需要注意的是。如果將相同的光學元件安裝在具有較小探測器的相機上(進入光學限制區域),那么像差可能會變得令人難以接受。請注意,我們所指定的相機系統具有特定的光學-探測器組合(Fλ/d)。任何其他組合可能無法提供所需的性能。
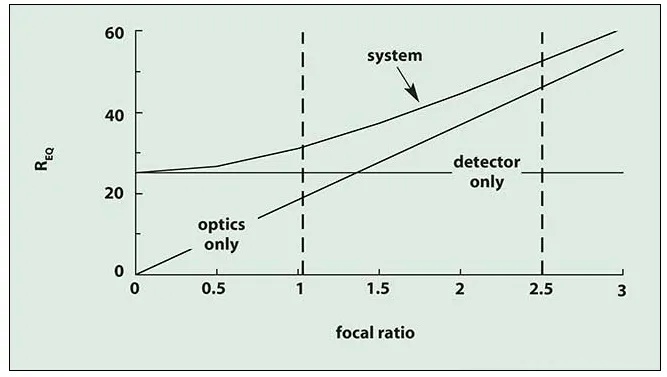
圖 4、一款典型長波紅外攝像機的等效分辨率(像素間距 d = 25 微米)。在焦距 F = 1.02 處,探測器限制的范圍位于垂直虛線左側,而光學限制的范圍則在 F = 2.5 以上。請注意,圖 3 和圖 4 中兩個坐標軸的刻度不同
這是一個“小即是好的”世界。探測器的尺寸正在不斷縮小,這使得系統設計師能夠制造出更小的相機。然而,這給光學設計師帶來了負擔。例如,將 1/2 英寸格式的陣列替換為 1/4 英寸格式的陣列,就需要將焦比降低 2 倍,以將等效分辨率降低 2 倍。此外,靈敏度與 (d/F)2 成正比。如果探測器尺寸縮小 2 倍,那么焦比也必須降低 2 倍,以保持相同的靈敏度。
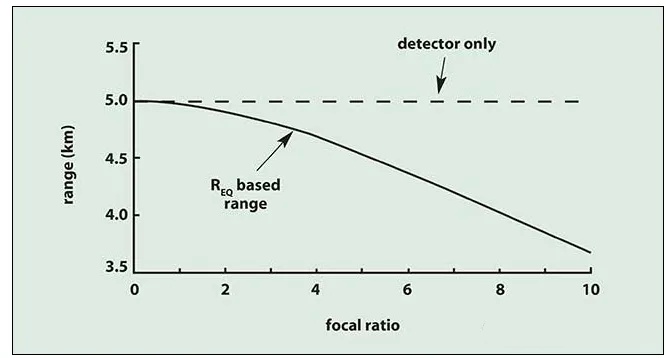
圖 5、 使用 1/2 英寸格式的 CCD 相機以及固定焦距為 50 毫米的鏡頭對 1 米大小目標的檢測范圍。光圈直徑會隨著焦距比的增大而減小。假設大氣透射率為 1
系統設計存在諸多相互沖突的要求。為了減少偏差,通常需要采用高焦距的鏡頭系統。為了實現最大的靈敏度,應選擇低焦距的系統。為了達到最佳的遠距離性能,似乎需要使用長焦距的鏡頭。對于固定直徑的光圈,這意味著需要高焦距;但在光學限制的范圍內,更長的焦距鏡頭并不會提高遠距離性能。
該分析將分辨率表述為 Fλ/d 比率的函數。圖 3 至圖 5 展示了特定相機在波長和探測器尺寸固定情況下的性能表現。系統性能圖表會因所選變量的不同而有所差異(例如,固定 fλ 但改變 D,或者固定 D 但改變 fλ)。無論選擇何種變量,成像系統最終都會受到探測器限制或光學限制的影響。雖然 MTF 和等效分辨率方法提供了描述系統性能的數學公式,但它們無法提供圖像。
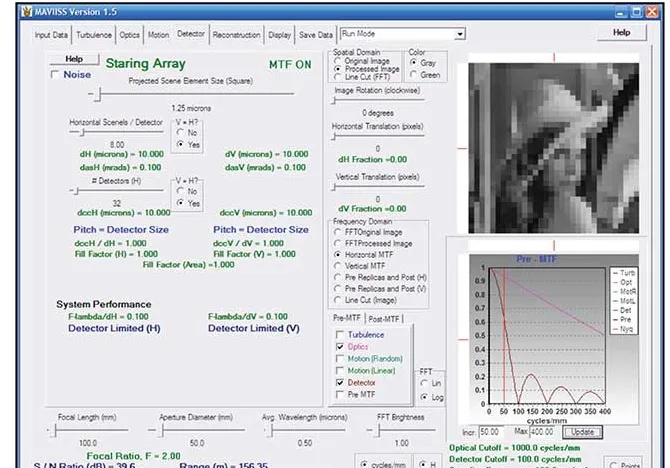
圖6、圖形用戶界面maviss設置1/2英寸格式CCD與50毫米鏡頭。右下角的MTF與圖1相同,圖像與圖2相同(Fλ/d = 0.1)
同樣重要但通過一般圖像難以察覺的是采樣偽影。邊緣模糊和相位效應在《探測器陣列:馴服不規則形狀問題》一文中有所描述。通過周期性圖案(如美國空軍 1951 年靶標和條形碼)可以增強采樣效應。MAVIISS 能夠模擬從低填充因子到由超分辨率算法生成的任何輸入場景的各類成像系統。其功能豐富的圖形用戶界面(圖 6)使用戶能夠輕松且快速地在系統設計的權衡空間中進行操作。重要參數的值通過滑塊進行控制。由于其快速執行速度,MAVIISS 在重要參數變化時能夠提供近乎流暢的圖像變化。
審核編輯 黃宇
-
探測器
+關注
關注
15文章
2768瀏覽量
75981 -
相機
+關注
關注
5文章
1593瀏覽量
55933
發布評論請先 登錄
紅外焦平面探測器核心指標NETD介紹
紅外焦平面探測器的分辨率有哪些?高分辨率有哪些優勢?

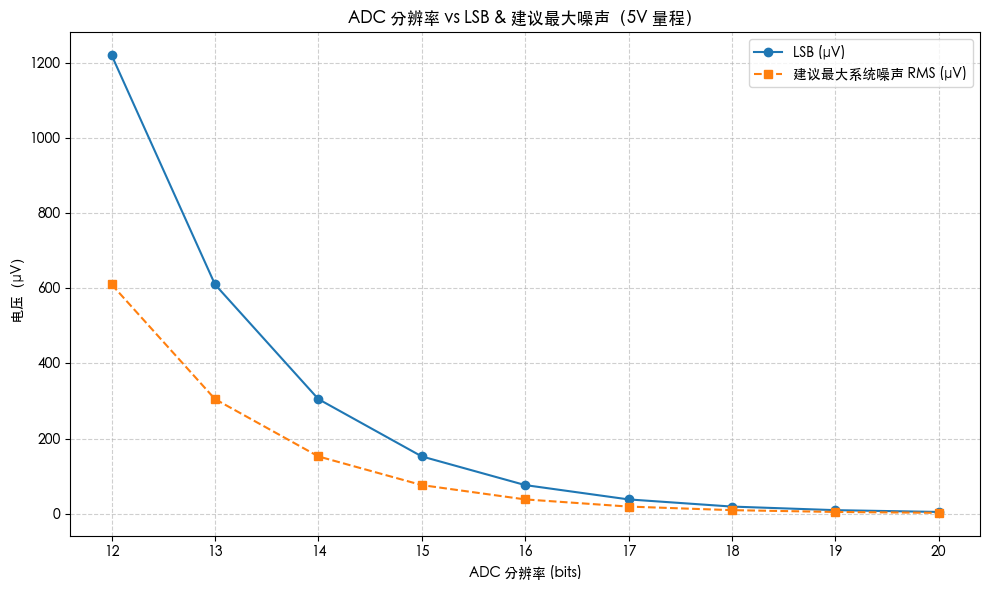
ADC分辨率與精度的區別是什么
解析SDD?探測器的核心技術及應用領域
紅外探測器像元尺寸與光學鏡頭關系解析

鏡頭分辨率如何匹配工業相機的分辨率

光學氣體成像(OGI)探測器應用場景有哪些?
分辨率對于模擬到數字轉換器有什么重要性
分辨率 vs 噪聲 —— ADC的挑戰
VirtualLab:通用探測器
如何計算存儲示波器的垂直分辨率?
CX3上的AR0245傳感器的探頭控制分辨率錯誤怎么解決?
VirtualLab Fusion應用:光波導系統的均勻性探測器
旋轉式測徑儀的測量精度和分辨率受哪些因素影響?
紅外探測器像元尺寸怎么選



 工商網監
工商網監
評論