 ADI如何構建具身智能的物理基石
ADI如何構建具身智能的物理基石

具身智能,這一承載著將AI賦予物理實體的宏大愿景,正站在從實驗室突破走向產業規模化應用的關鍵路口。根據Markets and Markets報告,人形機器人市場預計將從2024年的20.3億美元增長到2029年的132.5億美元,復合年增長率(CAGR)高達45.5%。2025年,全球人形機器人市場規模預計將突破85億美元,這一驚人的增長預測背后,是行業對能夠執行復雜任務的智能機器人日益增長的需求。
在這一產業浪潮中,解決核心物理挑戰的關鍵技術正不斷涌現,并獲得業界的高度認可。近日,ADI的兩款核心器件便斬獲殊榮,其中TMC9660高集成硬件智能伺服電機驅動控制芯片榮獲“年度優秀電機控制技術產品獎”,而ADMT4000—單芯片角度和多圈編碼器位置傳感器則摘得“年度優秀AI機器人創新產品獎”。這兩個獎項不僅是對產品創新的肯定,更精準地指向了具身智能從實驗室邁向商業化應用所必須攻克的技術難點。


目前,運動控制、環境感知、多體協作、芯片小型化及功耗續航等,是具身智能落地過程中環環相扣的難題。要知道,頂尖的AI算法必須運行在同樣卓越的物理硬件基礎之上,而感知、控制與連接,正是構建這一基礎的核心關鍵。
徹底擺脫“斷電失憶”
機器人運動控制的精確性與可靠性,始于對每一個關節當前絕對位置的精確感知。尤其是在意外斷電重啟后,快速恢復位置信息的能力,是衡量其性能的核心指標。
在這方面,傳統方案各有瓶頸,其中“齒輪組+單圈編碼器”的機械式方案,存在機械磨損與背隙,長期運行影響精度,且結構笨重,與人形機器人追求的輕量化相悖;“備用電池+存儲器”的電子方案則引入了電池壽命、維護更換等問題,增加了系統的復雜性和長期擁有成本;而基于韋根(Wiegand)效應的方案在某些工況下,尤其是在圈數累積較多或轉速變化劇烈時,存在發生圈數計數錯誤的風險(即“丟圈”現象),這對于要求高可靠性的機器人應用是不可接受的。
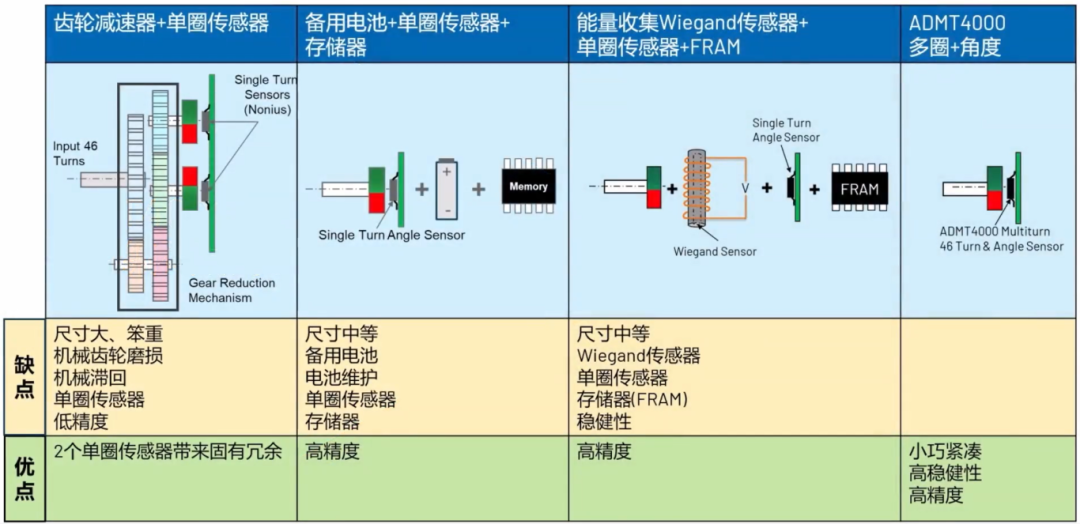
為從根本上克服這些挑戰,ADI推出了ADMT4000單芯片多圈位置傳感器。其核心技術突破在于利用磁疇壁在磁性納米導線中的可控傳播,實現了完全無源(無供電)狀態下的多圈位置信息記錄。這意味著,即使在系統完全斷電期間關節發生了運動,ADMT4000內部的物理狀態也會隨之改變并被保留。當系統重新上電時,只需一次簡單的讀取,即可立即獲知橫跨46圈測量范圍的絕對位置,精度高達±0.25度。這種上電立即知位的特性,徹底省去了繁瑣的歸零校準,極大提升了機器人的作業效率和系統的魯棒性。
除了在人形機器人關節中的核心應用,ADMT4000憑借其無源、多圈、高可靠性的特點,在工業協作機器人、起重機拉線式編碼器,乃至汽車安全帶卷收器和線控轉向系統等對安全性和可靠性要求極高的場景中,也展現出巨大的應用潛力。
從復雜算法到高效集成的硬件化運動控制
擁有了精確的感知,如何將其轉化為平順、高效的物理動作,是運動控制的核心。磁場定向控制(FOC)因其出色的轉矩控制和平穩運行特性,已成為高性能伺服系統的技術標準。但其復雜的算法實現和參數調試過程,對開發團隊構成了巨大的軟件工程負擔,往往耗費大量研發資源,并延長了產品上市周期。
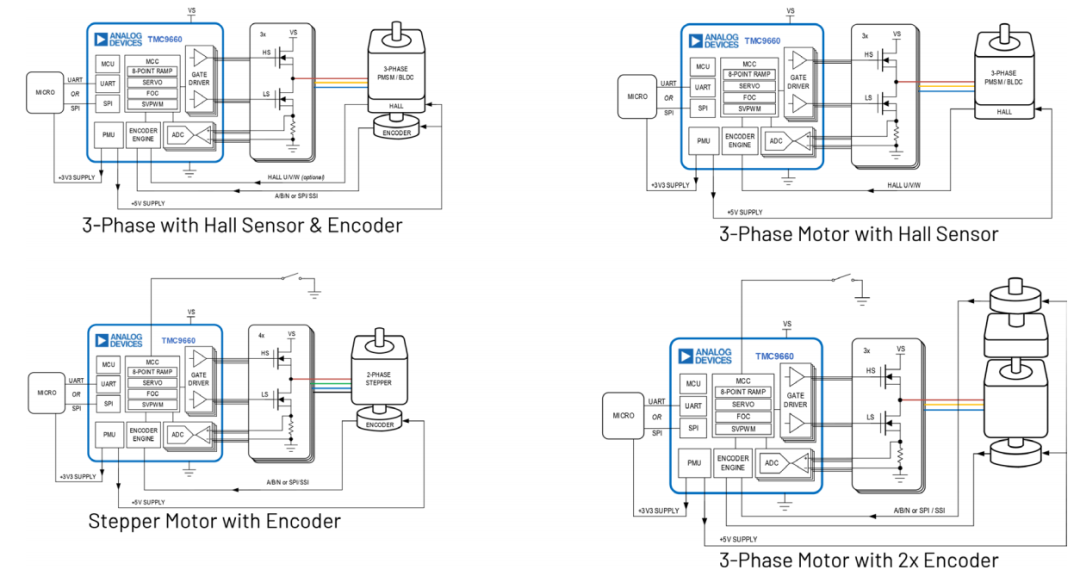
TMC9660子系統圖
對此,ADI高集成單片伺服驅控芯片TMC9660將工程師從這種復雜性中解放出來,同時也有效解決了機器人設計中空間、效率與控制精度之間的矛盾。這款芯片內部集成了MCU、70V/2A智能柵極驅動器(GDRV)、LDOs及Buck轉換器,開發者僅需外置功率MOSFET即可構成完整的伺服驅動單元。這種高度集成的設計,極大地簡化了關節驅動的硬件電路,為機器人靈巧手等狹小空間內的多自由度控制提供了可能。
更重要的是,通過將控制算法硬件化,TMC9660支持高達100kHz的伺服環路控制及8點Ramp軌跡發生器,確保了機器人動作的高效、精準與平順,讓開發者能從繁瑣的底層驅動開發中解放出來,更專注于上層應用與智能化算法的創新。
構建高效的機器人通信架構
具身智能機器人是一個復雜的分布式系統,其“大腦”需要實時處理來自全身各處的海量數據,并向“四肢”下達協同指令。這就要求其內部通信網絡必須具備高帶寬、低延遲和高可靠性,同時還要應對布線復雜的挑戰。ADI為此提供了一套針對性的通信連接解決方案。
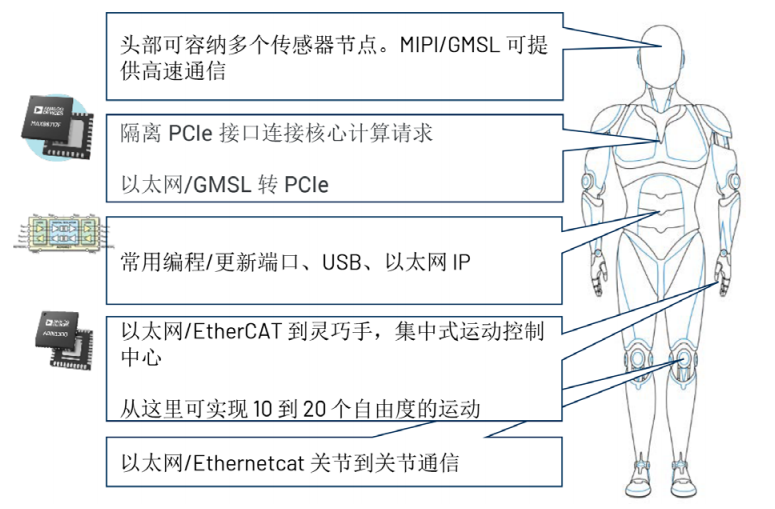
在數據處理的核心層,作為一款具有低延遲特性的低功耗、單端口、千兆以太網收發器,ADIN1300提供了高速數據交換的主干道,并確保了機器人從感知到行動的實時性的關鍵以及續航力能。并且ADIN1300集成了高能效以太網(EEE)物理層器件(PHY)內核以及相關的通用模擬電路、輸入和輸出時鐘緩沖、管理接口和子系統寄存器以及MAC接口和控制邏輯,以便管理復位和時鐘控制以及引腳配置。

而對于攝像頭、激光雷達等高帶寬的感知數據接入,ADI的GMSL技術提供了極為高效的方案。以MAX96717與MAX96724為例,它們能通過單根輕便的同軸電纜或屏蔽雙絞線,長距離傳輸實時、未壓縮的視頻與傳感器數據,并同時承載控制信號與遠端供電。這項技術極大地簡化了機器人復雜傳感器系統的布線,有效減輕了機械臂等運動部件的重量和慣量。
而在連接遍布全身的傳感器與執行器時,SPE技術則展現出其獨特的優勢。ADI提供了多種SPE產品組合,例如基于10BASE-T1L標準的ADIN1100 PHY、ADIN1110 MAC-PHY及ADIN2111雙端口交換機,支持在單根雙絞線上實現長距離連接和菊花鏈式組網,有效減少了機器人臂內的線束數量;而基于10BASE-T1S標準的AD330x系列產品,則支持在短距離總線上掛載多個設備,進一步簡化高密度節點的連接拓撲。
從實驗室到產業應用的,具身智能發展離不開底層硬件技術的托舉。ADI正通過一系列高性能解決方案直面產業核心痛點,將宏大的具身智能構想,落實為產業化道路上堅實可靠的每一步,與全球合作伙伴共同迎接一個更智能、更高效的機器人時代。
-
ADI
+關注
關注
150文章
46082瀏覽量
269994 -
人形機器人
+關注
關注
7文章
859瀏覽量
18237 -
具身智能
+關注
關注
0文章
251瀏覽量
769
原文標題:ADI如何構建具身智能的物理基石?感知、控制與連接解決方案一覽
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
【「AI芯片:科技探索與AGI愿景」閱讀體驗】+具身智能芯片
2025世界機器人大會亮點:ADI探討具身智能產業化應用技術挑戰

具身機器人十大發展趨勢


英特爾? 具身智能大小腦融合方案發布:構建具身智能落地新范式

鴻基智啟:東土科技為具身智能時代構建確定性底座






 工商網監
工商網監
評論