 AS三部曲收官 | TSN精度突破:IEEE 802.1AS如何實現納秒級時間同步?
AS三部曲收官 | TSN精度突破:IEEE 802.1AS如何實現納秒級時間同步?

在TSN、車載網絡與工業自動化等場景中,時間同步精度直接決定分布式系統的性能邊界—— 哪怕微秒級偏差,都可能導致傳感器與執行器協同失效。
為了幫大家完整掌握IEEE 802.1AS(時間敏感網絡定時和同步協議,以下簡稱AS)同步邏輯,虹科AS三部曲已來到終章,先快速銜接前兩篇核心:
第一篇《如何理解TSN同步概念中的時鐘角色?》拆解了同步體系里各類時鐘的定位與協作關系,理清「誰主導、誰跟隨」的基礎邏輯;
第二篇《TSN同步運行機制:多級設備同步如何避免誤差累積?》聚焦多級同步鏈路,講透同步過程中誤差「不疊加」的關鍵設計;
而這最后一篇,我們將直擊「高精度」的核心:為什么AS能突破傳統IEEE 1588(PTP)的精度瓶頸?硬件集成與鏈路層優化如何從根源減少誤差?更有真實設備實測案例,帶你看同步精度如何穩定在20ns內,以及如何規避補償異常時的精度問題。想掌握AS同步的底層技術邏輯,這篇就是關鍵!
背景概述
時間同步精度是TSN、工業自動化等關鍵領域的生命線,它衡量著分布式系統內各節點時鐘的協同程度,其微秒乃至皮秒級的偏差直接決定了系統性能的邊界。例如分布式系統對傳感器與執行器的時間協調有極高要求,微秒級的偏差足以導致操作失敗。
解決這一問題的根本方法,是為所有組件建立一個統一的時間共識,即讓每個局部時鐘都與全局時鐘源保持同步。盡管IEEE 1588精確時間協議(PTP)能利用傳統以太網實現亞微秒級同步,并因此備受青睞,但其精度性能在延遲不同的大型級聯網絡中會急劇下降。
因此AS正開始逐步被各行業青睞,因為其能提供更高和更可靠的同步精度,根本原因在于通過簡化協議、強制硬件時間戳、采用對等延遲機制并與TSN網絡深度協同,IEEE 802.1AS在封閉網絡中實現了較通用IEEE 1588更卓越的同步精度與可靠性。
02.
AS精度優勢
AS精度更高的核心原因:
2.1 協議簡化
AS通過「減法」取代繁瑣來提高確定性。基礎IEEE 1588為兼顧廣泛適用性,內置了大量可選功能和復雜機制,這引入了不確定性。AS則反其道而行,通過做「減法」── 例如簡化最佳主時鐘算法并固化鏈路延遲測量機制 ── 有效消除了這些不確定性源。

2.2 硬件集成
精度提升的最關鍵因素,是AS強制與網絡硬件PHY層深度集成。此舉從根本上規避了軟件棧帶來的可變延遲,為全網建立了統一的硬件級共同時基。
2.2.1 精準時間戳點
IEEE 1588:可以在應用層、操作系統或MAC層打時間戳,最佳實踐是在MAC層。
AS:強制要求在PHY層或盡可能靠近線纜的地方打時間戳。這消除了協議棧、驅動程序和交換機內部緩存的可變延遲,從源頭上保證了時間戳的準確性。
2.2.2 鏈路延遲測量
IEEE 1588:默認使用端到端延遲機制,延遲請求和響應需要穿過整個網絡路徑,路徑上的任何擁塞都會影響測量精度。
AS:強制使用對等延遲機制。每個Slave設備只與其直連的上一跳設備(通常是交換機)測量鏈路延遲。這種方式將延遲測量局部化,不受整個網絡流量的影響,結果更精確、更穩定。
接下來,我們將重點分析硬件集成與鏈路層優化,深入剖析高精度時間同步的實現原理,并通過實驗直觀展示不同實現方案所帶來的精度差異。
03.
延遲機制
IEEE 1588(PTP)定義了一個主從系統架構。在IEEE 1588網絡中,僅存在一個處于活動狀態的主節點和多個從節點。如前兩篇文章所述,主節點與從節點之間會定期交換帶有時間戳的消息,用于檢測并校正從節點相對于主節點的偏移量和漂移值,同時測量兩者間的網絡延遲以進行同步調整。
為測量主從間的延遲,系統定義了兩種機制:點對點(P2P)和端到端(E2E)。現在的IEEE802.1AS采用P2P模式。那么,它為何會被AS青睞,又有哪些優點值得比較?
顧名思義,P2P僅測量與相鄰節點的延遲,而E2E則直接測量從節點到主節點的延遲。為深入理解,我們首先探討這兩種機制在簡單配置(從節點直接連接到主節點,中間無需任何線纜)下的報文處理與計算流程。
3.1 報文處理與計算流程
首先,主設備會向從設備發送「宣告消息」與「同步消息」。在發出同步消息的瞬間,主設備記錄時間戳T1。
根據其實現方式,T1可實時嵌入同步消息(一步模式),或通過后續消息單獨發送(兩步模式)。從設備在接收到同步消息時記錄時間戳T2。
基于T1與T2,從設備可初步估算時鐘偏移,但由于主從設備間的傳播延遲尚未確定,此時獲得的偏移量仍包含未補償的固定延遲。
在延遲計算的具體實現上,兩種機制的主要區別如下:
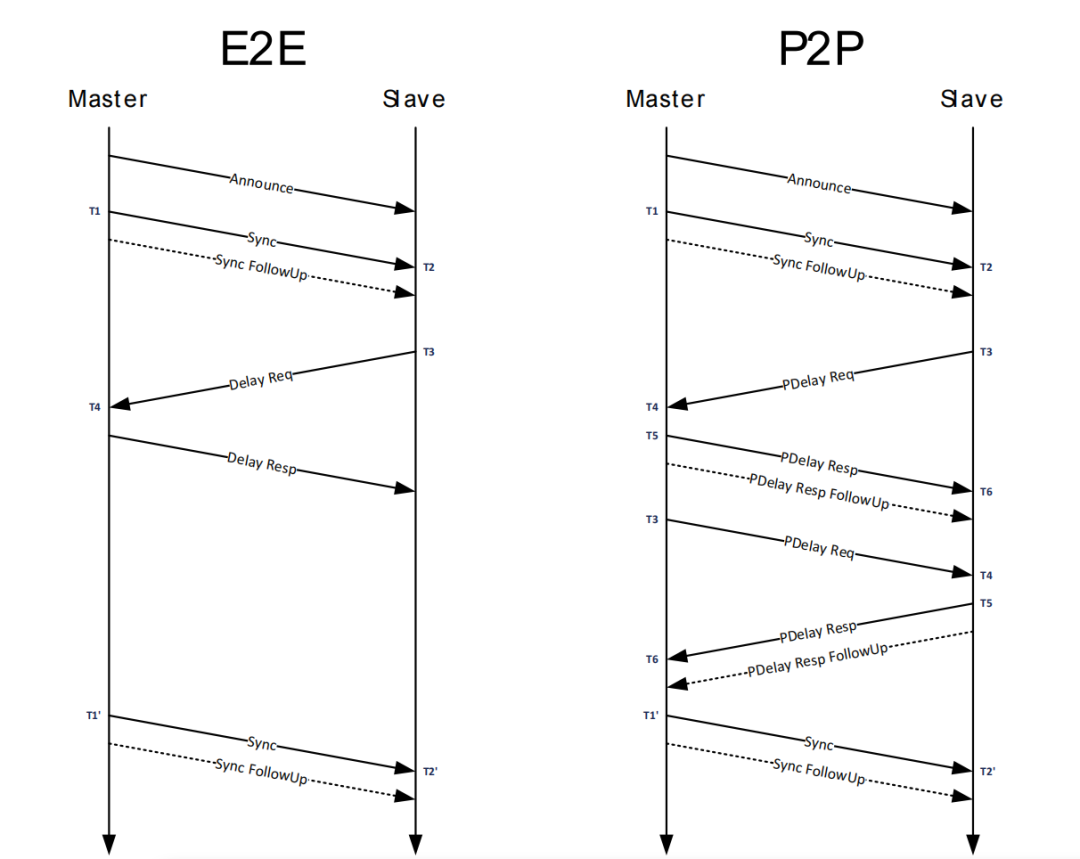
端到端(E2E)機制
從設備會向主設備發送延遲請求(Delay Req)消息并記錄發送時間戳T3。主設備在接收該請求后記錄時間戳T4,并通過延遲響應(Delay Resp)消息將T4發送給從設備。
此時從設備已掌握四個時間戳(T1-T4),可依據下述計算方法確定延遲值。
點對點(P2P)機制
在P2P網絡中,情況略有不同。
從節點會向其鄰居(即主節點)發送一個稱為P延遲請求(PDelay Req)的消息,并記錄發送時間戳T3。相鄰節點在收到PDelay Req消息時會獲取時間戳T4。
隨后,該設備會發送一個包含T4和T5時間戳的P延遲響應(PDelay Resp),并同步記錄發送時刻T5(根據節點能力,可即時插入響應消息,或通過后續消息發送)。當從設備接收到P延遲響應時,會記錄接收時間戳T6。
此時從設備已具備四個時間戳(T3-T6),可按照以下公式計算延遲值。值得注意的是,與端到端機制不同,主設備(或相鄰節點)也會采用相同方式計算延遲值。
3.2 機制對比與核心要點
因此,端到端(E2E)的延遲計算基于主節點發送的同步消息,而點對點(P2P)的延遲計算則完全獨立于同步消息。這意味著,要獲得高精度的延遲測量,兩個時鐘的頻率必須盡可能接近。對于端到端(E2E)系統而言,這一點尤為重要。在點對點(P2P)機制中,頻率同步同樣至關重要。
兩種延遲測量機制均基于一個關鍵前提:傳輸路徑延遲對稱,這一條件在標準以太網中通常成立。在獲得傳播延遲后,系統可結合同步階段采集的時間戳(T?與T?)計算出主從設備間的實際時鐘偏移,進而對從設備的時鐘相位進行校正。該相位校準過程隨每一輪同步消息的執行而持續進行。
實現高精度同步的另一關鍵參數是頻率漂移,即主從設備振蕩器之間的固有頻率差異。為校準此頻率偏差,需借助連續兩次同步過程中所記錄的時間戳序列(T?、T?‘、T?與T?’)。
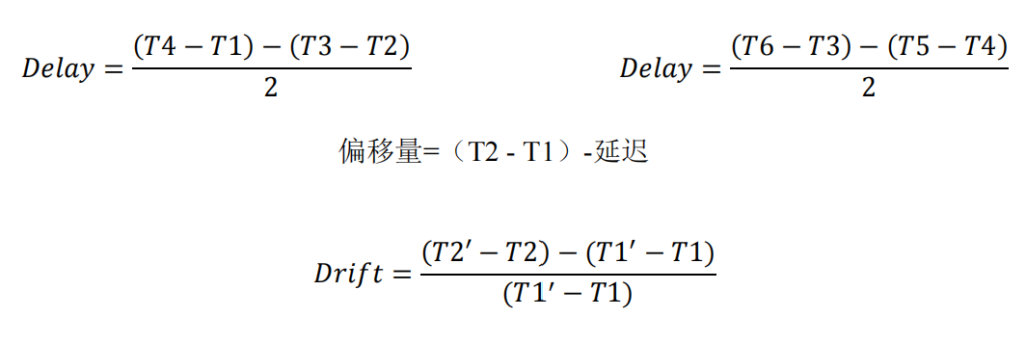
通過分析這四個時間戳,從設備可準確測算出頻率差異并進行動態補償。待頻率與相位均得到完整校準后,從設備即可實現與主設備的高精度時鐘同步。
04.
時間戳點
同步精度直接取決于時間戳的準確程度,這些時間戳必須盡可能精確地標記出發送與接收的實際時刻。
從設備對時鐘偏移(Offset)和傳輸延遲(Delay)的計算,均基于在不同位置采集的時間戳之差。因此,主從時鐘必須采用相同的時間標度,即保持一致的頻率。這一要求通過漂移補償機制實現:從設備借助控制回路微調其時鐘速率,適當加速或減速。若兩者頻率存在差異,將直接影響同步結果的準確性。
此外,系統假設通信路徑在兩個方向上的傳播延遲相同。盡管在以太網鏈路中這一條件通常成立,但長期來看,網絡重構或環境因素(如溫度變化)仍可能導致其發生改變。時鐘系統的響應速度受以下因素影響:同步與延遲測量的執行頻率,以及控制從設備時鐘的伺服回路動態特性。
綜上所述,最終可實現的同步精度由以下關鍵因素共同決定:
時間戳的精確度
時鐘源的頻率穩定性
同步報文發送的時間間隔
時鐘控制回路的調節特性
漂移補償機制的性能(即主從時鐘中可調整時間基準的準確性)
通信信道的對稱性(即雙向傳輸延遲是否一致且在長時間內保持穩定)
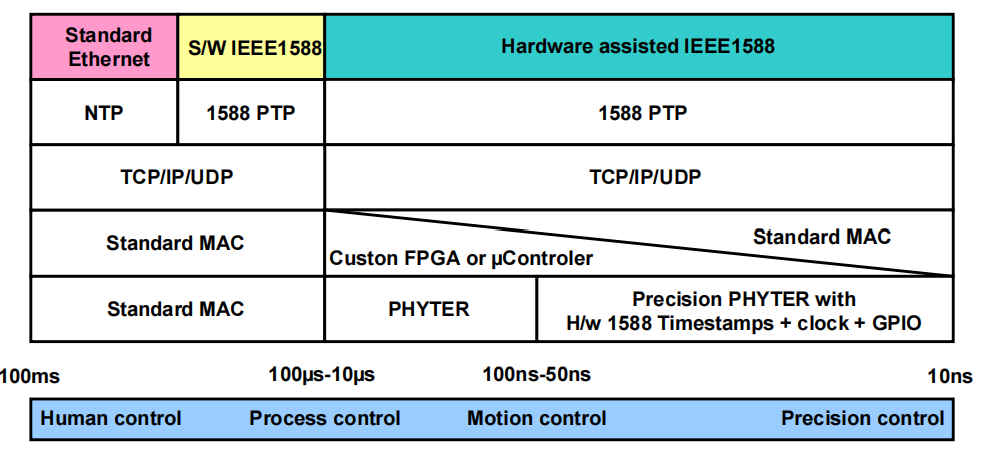
IEEE 1588(PTP)不同層級下的同步精度
如先前分析,時間戳的精確度是實現高精度時間同步的核心。以IEEE 1588(PTP)協議為例,IEEE 1588協議的時間戳支持可在系統不同層級實現,但所處層級越高,精度也隨之遞減。
4.1 軟件應用層實現
所有PTP功能(包含時間戳單元)都在軟件中處理。這是同步協議最簡單的實現方式。但是對于PTP數據包,它們從線路穿過所有層,軟件時間戳會導致軟件處理延遲無法進行有效修正。
應用層時間戳
高精度需要硬件輔助來生成時間戳和調整時鐘,而協議是在軟件中實現的。因為同步精度直接取決于時間戳精度,所以最準確的方法是在盡可能靠近物理層的硬件協助下檢測PTP消息并為其添加時間戳。
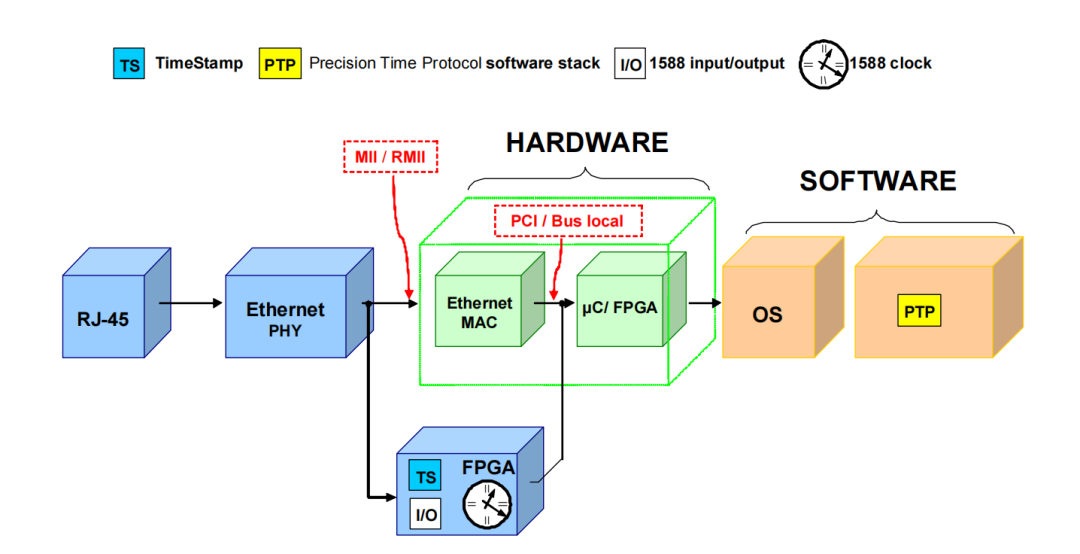
4.2 物理層PHY硬件時間戳實現
在物理層PHY中提供解析PTP消息并為其添加時間戳的能力,這樣所有的同步事件類型報文的時間參考平面都在PHY層,能夠有效的提高同步計算的精度。對于時間計算參考平面,在后文中會講解。
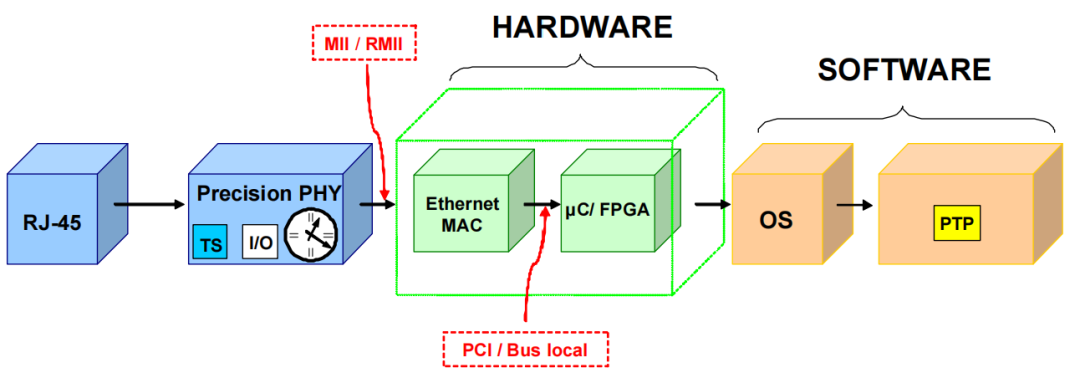
物理層PHY時間戳
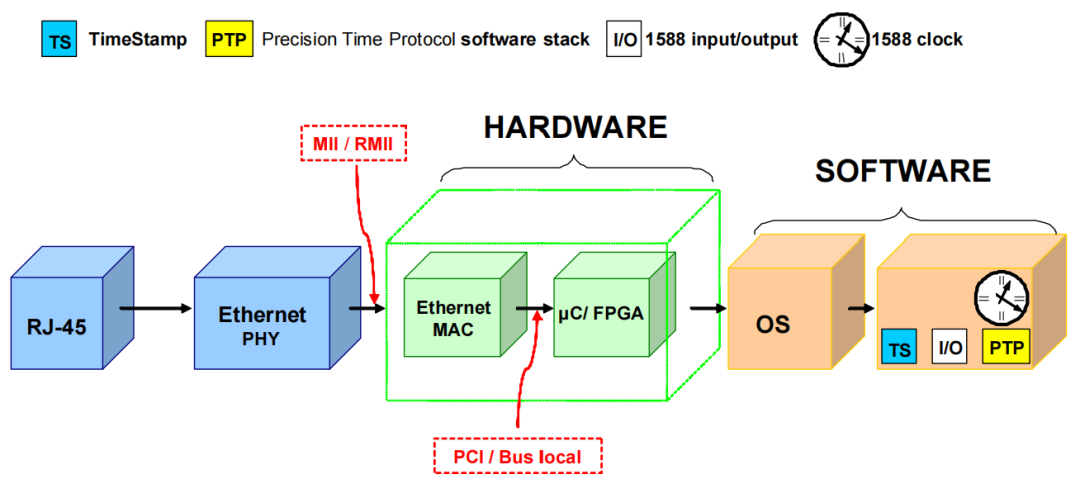
4.3 MAC層級硬件時間戳實現
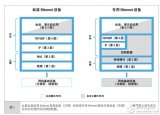
對于MII(Media Independent Interface)即媒體獨立接口,它是MAC與PHY連接的標準接口,作為IEEE-802.3定義的以太網行業標準,MII接口提供了MAC與PHY之間的互聯技術。
這里只是以MII接口舉例,對于一般的MAC與PHY,會有GMII/RGMII/SGMII等不同接口總線,但都是屬于衍生的以太網接口規范。它可以輕松捕獲、解碼和修改幀(以實現單步時鐘)。MII這種方法的準確性受PHY芯片時序特性的限制,因為MII的時鐘是由PHY提供。所需的邏輯可以位于FPGA中或作為微控制器的一部分。
MAC層級硬件時間戳
在MAC與PHY之間(位于MII層)設置時間戳點,無需實現PHY時間戳功能即可達成目標,這種模式特別適合FPGA應用,因其采用嚴格的數字互連架構。采用標準化接口,對頻率要求較低。接口可根據需要選擇攔截模式(支持單步操作)或被動監聽模式(支持雙步操作)。FPGA通過攔截MAC與PHY之間的路徑來提高時間戳支持。
4.4 時間戳測量平面
在IEEE Std 802.1AS-2011標準規范的8.4.3中有明確的定義 ——如果實現過程中使用的事件消息時間戳并非來自消息時間戳點,則生成的時間戳應根據實際檢測時間與消息時間戳點經過參考平面時間之間的時間間隔(固定或其他值)進行適當校正。
否則,時間感知系統之間會出現時間偏移。通常情況下,時間戳可能是在與參考平面不同的時間戳測量平面上生成的。此外,入站和出站事件消息的時間戳測量平面(以及該平面與參考平面的時間偏移)很可能不同。為了滿足本條款的要求,生成的時間戳應針對這些偏移進行校正。
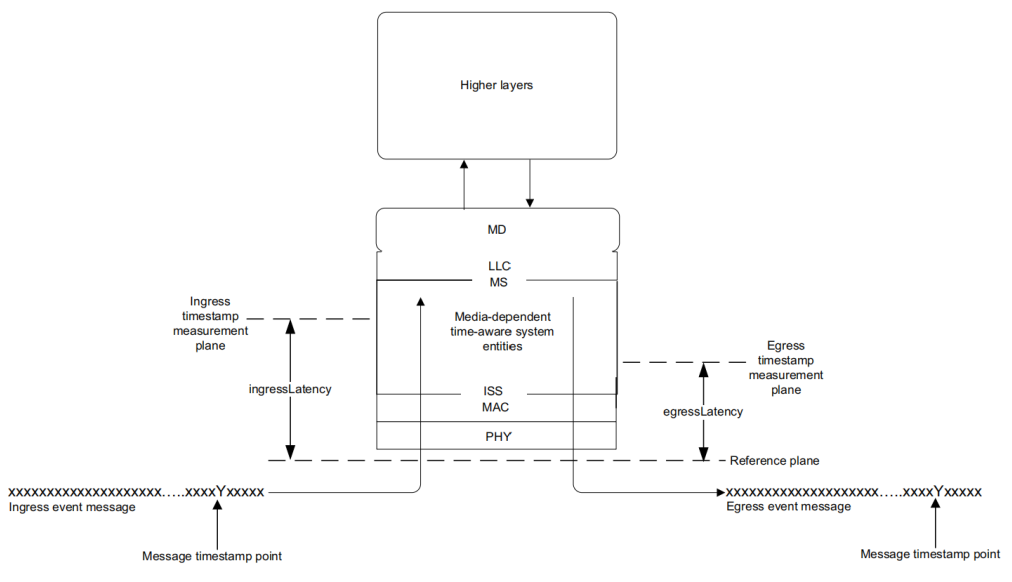
消息時間戳點、參考平面、時間戳測量平面和延遲常數的定義

其中,相對參考平面的時間戳和分別由相對于時間戳測量平面的時間戳和計算得出,計算時使用了它們各自的延遲egressLatency和ingressLatency。如果未能進行這些校正,則會導致從時鐘和主時鐘之間存在時間偏移。
05.
測試示例
5.1 測試配置
本文的測試示例基于虹科合作伙伴SOC-E的RelyUm系列TSN交換機所搭建的AS主從同步環境。測試采用兩臺RELY-TSN交換機,以點對點方式連接,具體將交換機1的Port-0與交換機2的Port-0相連。
為便于區分與管理,我們將交換機1的IP地址設置為192.168.4.64,交換機2設置為192.168.4.65。
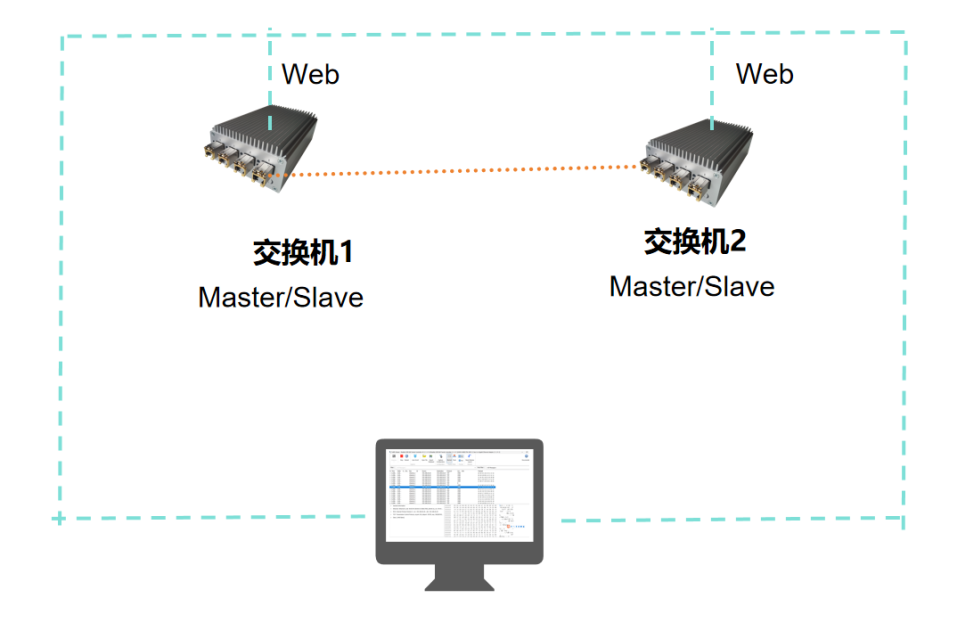
通過該配置,用戶可經由任一交換機的任一端口同時訪問兩者的Web配置界面。建議在實際操作中,連接至作為主時鐘的交換機上的Port-1進行訪問。
虹科合作伙伴SOC-E RelyUm系列
TSN測試方案
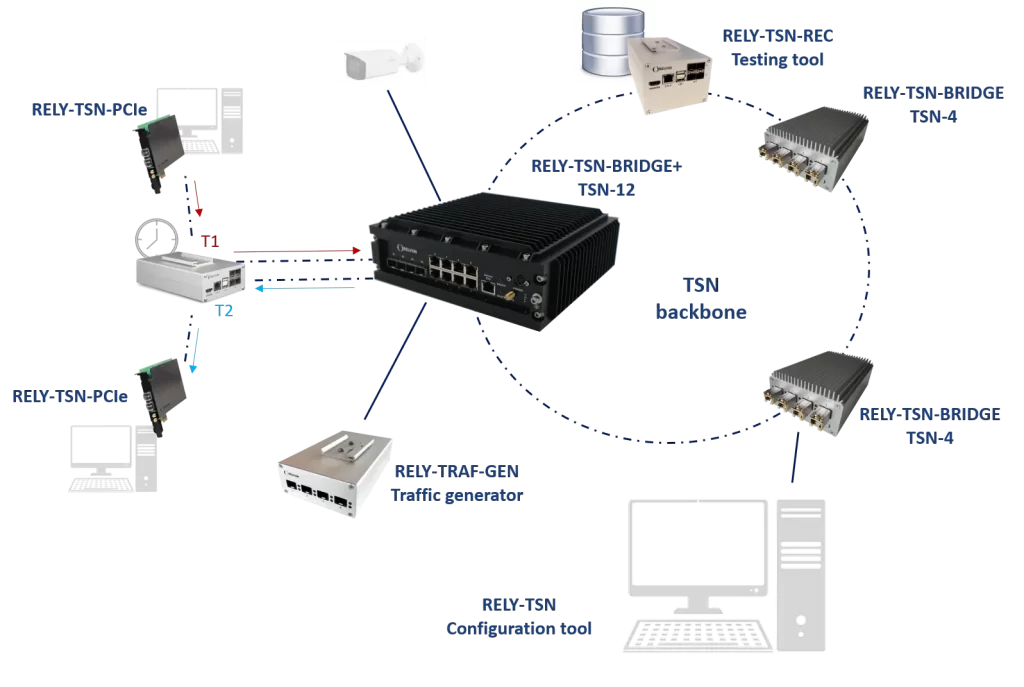
虹科為客戶提供SOC-E RelyUm系列TSN IP核、板卡、TSN交換機、測試套件等一站式解決方案,覆蓋從產品研發到實際應用的全鏈條。
無論您處于產業鏈的哪個環節,是進行新產品研發,還是構建完整的應用網絡,都能在我們這里找到適配的產品與服務,滿足您多樣化的需求。
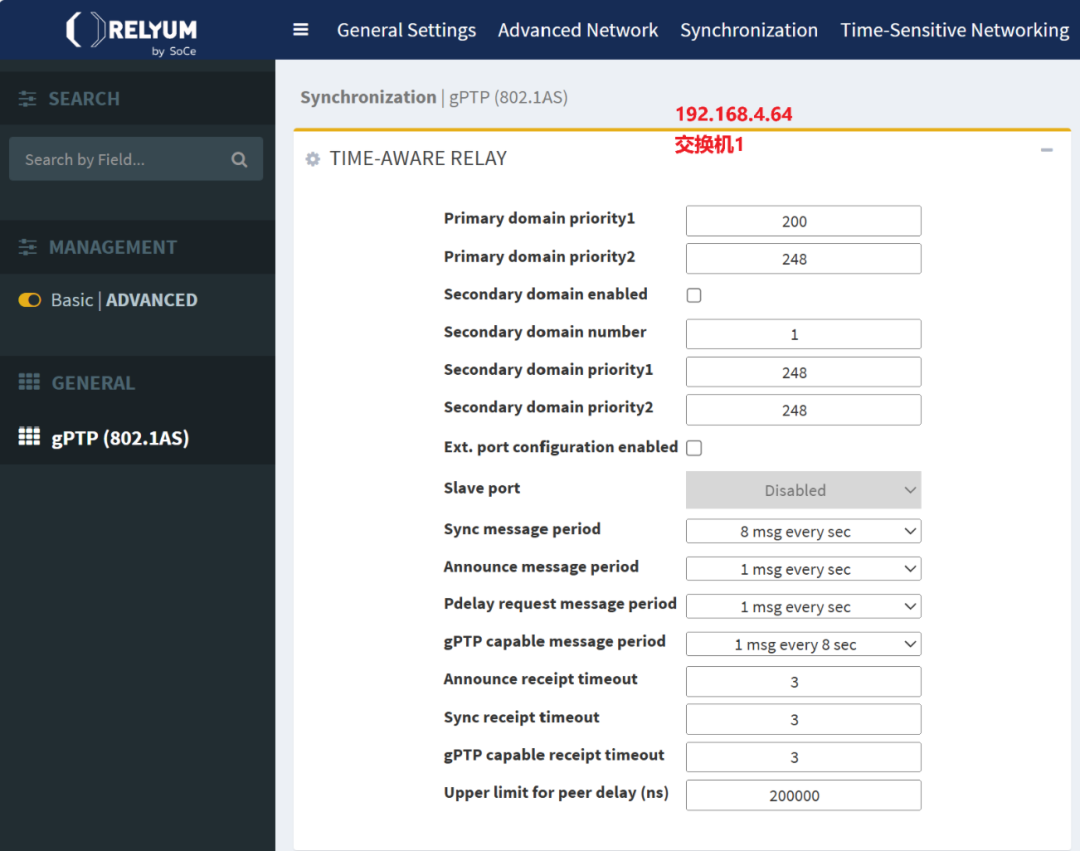
5.2 主從時鐘設置
根據對最佳主時鐘算法(BMCA)選取的規則,設置IP地址192.168.4.64交換機的時鐘Priority1為200,192.168.4.65交換機的時鐘Priority1為默認248,并開啟gPTP (generalized Precision Time Protocol) 的Start功能。此時情況下,4.64交換機的時鐘作為Master存在,4.65交換機作為Slave存在。

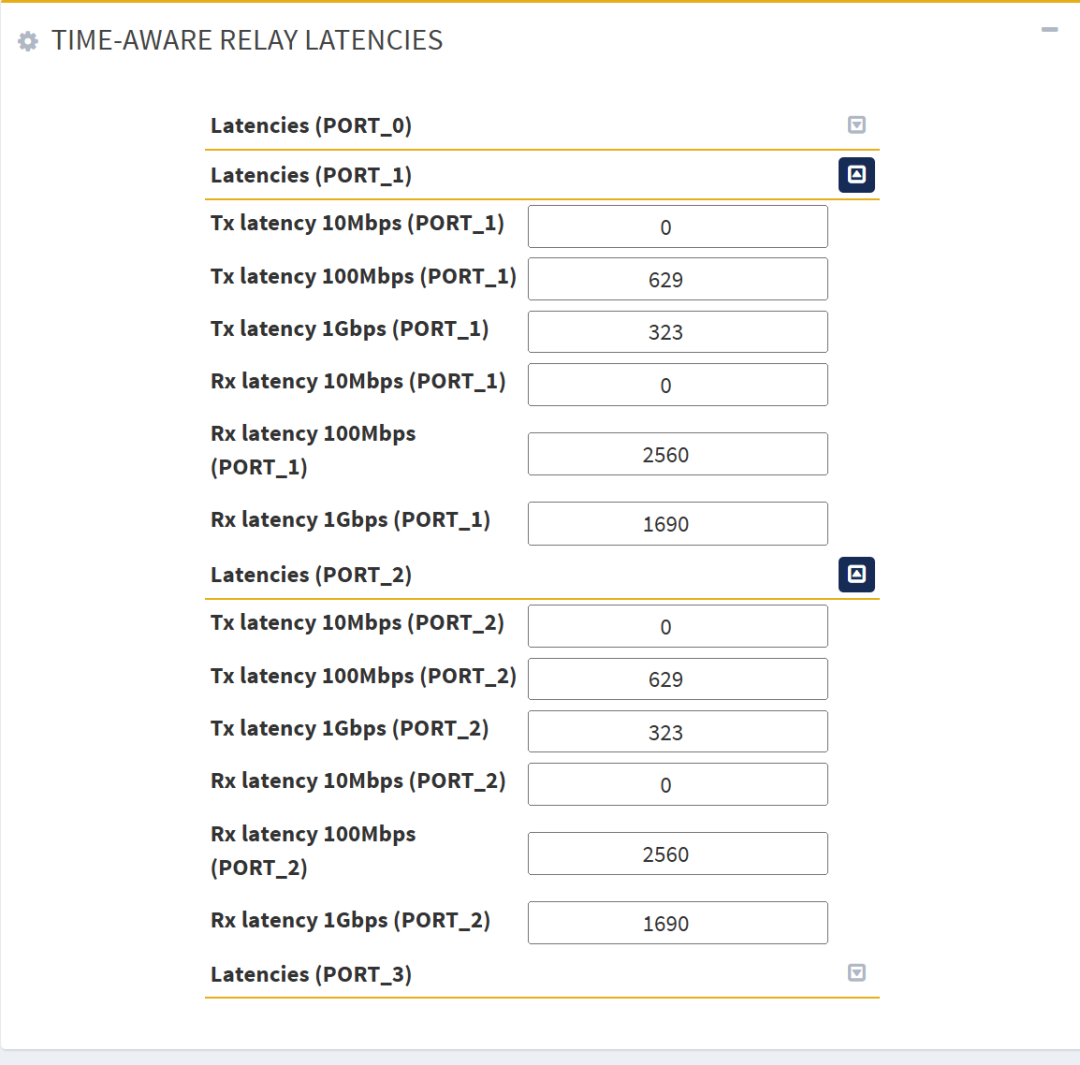
5.3 延遲補償
因為交換是采用TSN IP核實現,并且時間戳單元處于MAC層級,需要對MAC-PHY部分進行延遲補償修正。圖中提供對10/100/1000三種不同速度下的接收和發送延遲的補償方式。
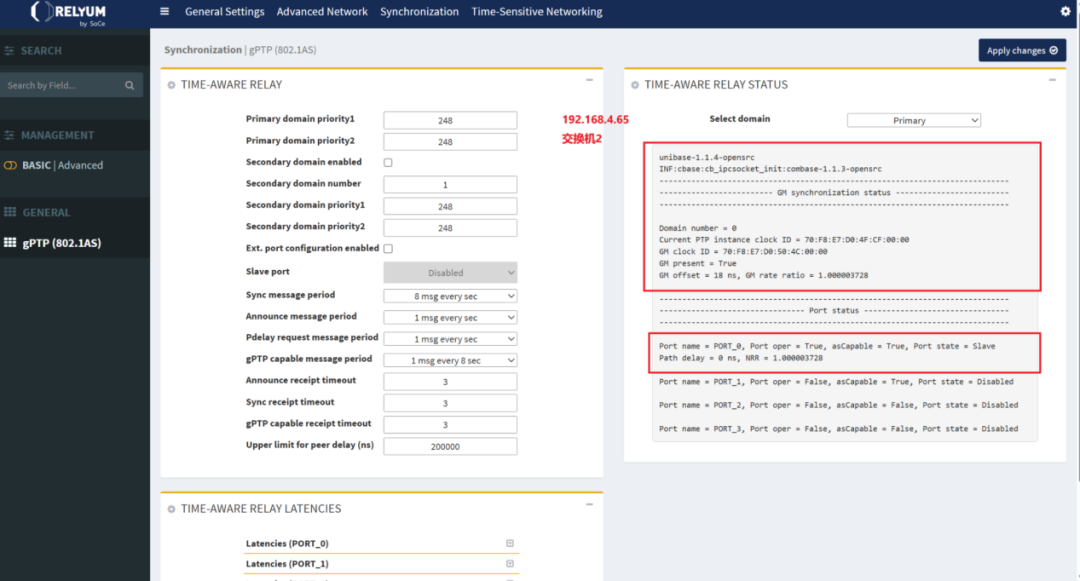
由測試結果可見,Slave設備(交換機2)的GM clock ID與Master設備(交換機1)的PTP clock ID一致,并且GM present=true,其同步精度(GM offset)約為20ns。
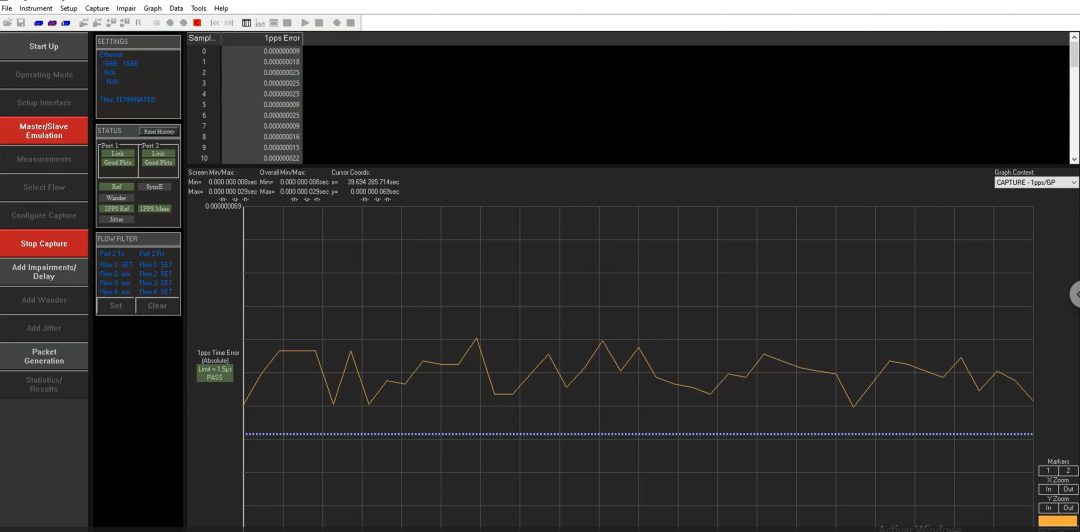
在與一些傳統測試廠商的案例對比中證實,在延遲補償參數優化得當的情況下,該精度可穩定保持在20ns以內。
5.4 延遲補償異常
在某些基于IP核的交換機設計方案中,若未預先在硬件層面對PCB布線及MAC至PHY間的收發路徑延遲進行精確補償,系統將必然引入固定的時間誤差,從而導致同步精度顯著下降。這本質上是因關鍵延遲未能在校準中被有效規避所致。
結語.
隨著本篇對硬件時間戳、對等延遲機制及延遲補償等核心原理的深入探討,由虹科帶來的AS三部曲系列至此圓滿收官。
回顧整個系列,我們從「概念篇」中厘清時鐘角色,到「機制篇」中剖析多級同步的誤差控制,最終在「實現篇」層層深入,揭示了IEEE 802.1AS實現納秒級同步的技術內核。
希望本系列能助您透徹理解AS協議如何為工業自動化、車載網絡等領域鑄就可靠的時間基石。若您希望將理論付諸實踐,虹科提供的從核心設備、測試方案到技術培訓的一站式TSN支持,將是您實現系統精準同步的理想選擇。
作者簡介
羅顯志
虹科高級技術工程師,專注TSN技術領域,具有豐富的理論基礎和應用經驗,提供專業的TSN測試和培訓服務。
-
時間同步
+關注
關注
1文章
226瀏覽量
10631 -
工業自動化
+關注
關注
17文章
3125瀏覽量
69878 -
TSN
+關注
關注
3文章
294瀏覽量
17981
發布評論請先 登錄
油煙機選購三部曲
冒泡排序法三部曲の冒泡排序原理版(一)
榮耀Note9什么時候上市?榮耀三部曲華為榮耀Note9即將發布,配置、渲染圖、價格消息匯總
基于LEEE 802.1 TSN標準 用于工業物聯網的時間敏感網絡TSN
存儲三部曲的第一部——NAS
存儲三部曲最后一部SAN的現狀如何?
虹科干貨 | TSN標準——IEEE802.1AS-2020和IEEE802.1AS-2011有哪些不同?

虹科干貨|TSN標準——IEEE802.1AS-2020和IEEE802.1AS-2011有哪些不同?
虹科干貨|TSN標準——IEEE802.1AS-2020和IEEE802.1AS-2011有哪些不同?

基于TSN 802.1AS協議的時間同步分析(7種延時,1次厘清)

AS-2020 TSN CoreSolution直接拿下

虹科干貨 | AS三部曲之一:如何理解TSN同步概念中的時鐘角色?

AS三部曲之二 | TSN同步運行機制:多級設備同步如何避免誤差累積?



 工商網監
工商網監
評論