 ProfiNet轉EtherCAT工業數據采集網關實現禾川PLC與ABB機器人通訊的配置案例
ProfiNet轉EtherCAT工業數據采集網關實現禾川PLC與ABB機器人通訊的配置案例

一、項目背景
華東某新能源頭部企業 2025 年啟動的 20 GWh 儲能電池模組自動線,節拍要求≤18 s/模組,整線 42 臺設備。主控采用禾川 X3ME 系列 PLC(EtherCAT 主站,型號 X3ME-3232T),但關鍵工位——激光清洗-貼膠-堆疊一體化單元——必須集成 2 臺 ABB IRB 6700-200/2.60 六軸機器人(ProfiNet 從站)。兩種實時以太網協議幀格式、時鐘機制完全不同,若采用“PLC+第三方卡”方案,硬件成本高、掃描周期碎片化,且機器人原廠禁止修改固件。最終選用“遠創智控 YC-PN-ECT協議轉換網關”,讓網關同時扮演 ProfiNet 從站與 EtherCAT 從站,實現 1 ms 級數據鏡像,在不觸動任何設備固件的前提下完成異構同步。

二、設備清單
1.禾川 PLC:X3ME-3232T,EtherCAT 主站,周期 250 μs,帶 32 軸同步。
2.ABB 機器人:IRB 6700-200/2.60,ProfiNet 從站,固件 6.08,負載 200 kg,臂展 2.6 m,配 2 臺 ABB DSQC 688 分布式 I/O 模塊。
3.協議網關:遠創智控 YC-PN-ECT工業級協議轉換網關,雙以太網口,獨立 MAC,支持 1440 Byte PN I/O 與 512 Byte EtherCAT PDO,24 VDC/200 mA,IP20,導軌安裝。
4.交換機:赫斯曼 OCTOPUS 8M-EEC,工業級千兆,環網冗余。
5.工程軟件:
– 禾川 HCPRO 2.91(EtherCAT 網絡配置)
– TIA Portal V19(ProfiNet GSDML 組態)
– YC-PN-ECT ConfigTool V1.4(遠創智控官方配置)
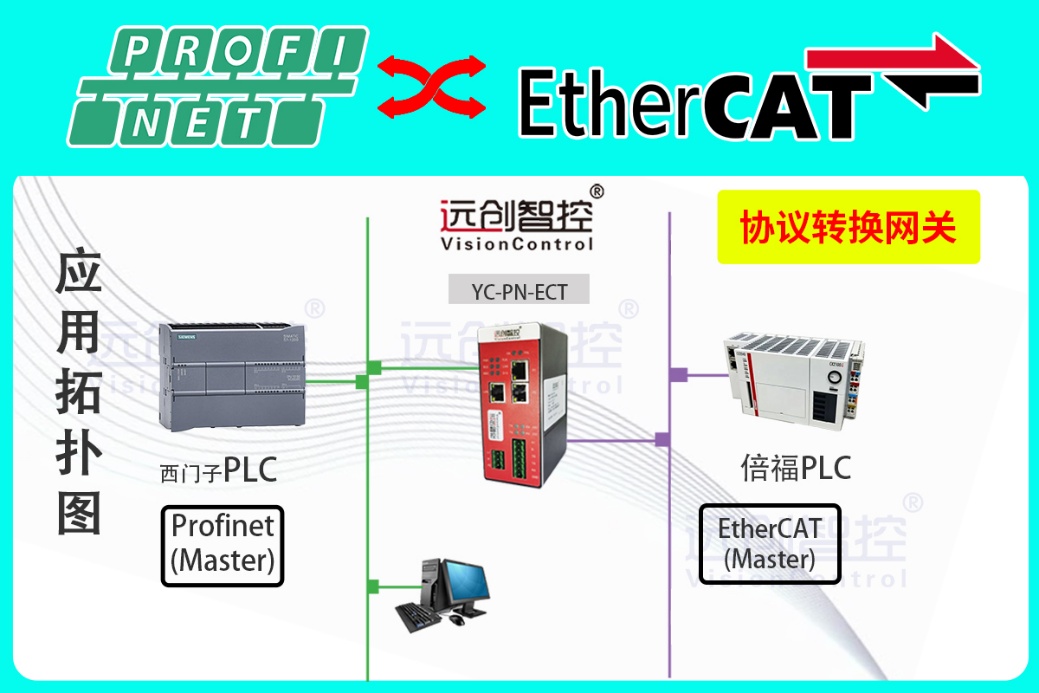
二、網絡拓撲
禾川 PLC →(EtherCAT, 100BASE-TX 屏蔽網線)→ YC-PN-ECT 端口 A
YC-PN-ECT協議轉換網關端口 B →(ProfiNet, 100BASE-TX)→ 赫斯曼交換機 → ABB 6700 機器人 CPU 端口 + DSQC 688 I/O
網關本身不占用任何主站授權,也不參與運動學解算,僅做“雙端口 RAM”級別的數據映射。

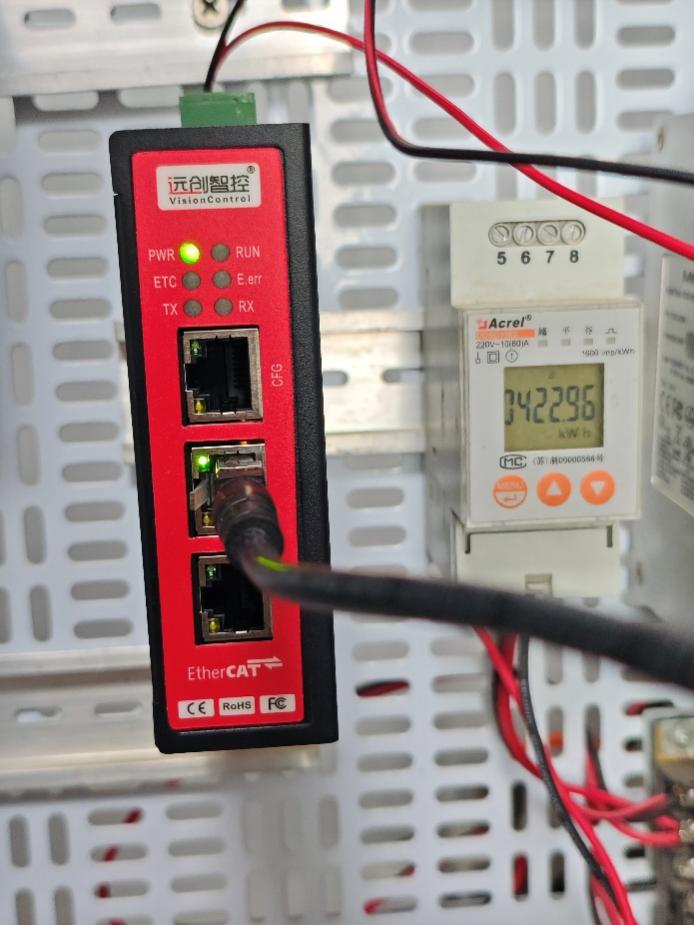
四、網關硬件安裝
1.35 mm DIN 導軌鎖緊,網關左側預留 30 mm 散熱空間;右側安裝 24 V/10 A 電源,PE 端子單獨接地。
2.使用 M12 D-coded 接頭連接 EtherCAT 段,確保屏蔽層 360°壓接;ProfiNet 段采用 RJ45 金屬殼屏蔽跳線,長度≤30 m。
3.上電后,ECT 指示燈綠色常亮表示 EtherCAT 進入 OP 狀態;PN 指示燈綠色常亮表示 ProfiNet 進入 DataExchange,紅燈閃爍代表同步丟失,方便現場快速排故。
五、軟件配置步驟
(一)EtherCAT 側(禾川 PLC)
1.在 HCPRO 新建工程,導入 YC-PN-ECT 的 ESI 文件“YC_PN-ECT_V1.4.xml”,把網關拖拽到總線,分配站地址 1001。
2.在“過程數據”窗口建立 2 個 PDO 映射:
– TxPDO 256 Byte(PLC→網關→機器人,含 6 個 Real 型目標坐標、1 個 DWord 控制字、64 Byte 預留工藝參數)
– RxPDO 256 Byte(機器人→網關→PLC,含 6 個 Real 型實際坐標、1 個 DWord 狀態字、1 個 Real 型循環時間)
3.設置分布時鐘(DC)同步,單元周期 1 ms,同步窗口 ±100 μs;啟用“同步單元”功能,保證 32 軸伺服與網關同一時刻采樣。
(二)ProfiNet 側(TIA Portal)
1.安裝 GSDML 文件“GSDML-V2.43-YC-PN-ECT-20250705.xml”,在硬件目錄出現“YC-PN-ECT Gateway”。
2.拖放至 ProfiNet 網絡,分配設備名稱“RobotGW_01”,IP 地址 192.168.2.100,子網掩碼 255.255.255.0。
3.在“設備視圖”添加 2 個 I/O 槽:
– Slot1,Input 256 Byte
– Slot2,Output 256 Byte
與 EtherCAT PDO 長度保持一致,確保網關內部 1:1 地址映射,無需任何腳本。
4.啟用 IRT 等時模式,發送周期 1 ms,看門狗因子 3;把機器人 CPU 的輸入輸出地址分別映射到 DB100.DBB0~255 和 DB101.DBB0~255,方便后期維護。
(三)YC-PN-ECT工業智能網關ConfigTool 配置
1.電腦網卡設為 192.168.2.99,Ping 通網關默認 IP 192.168.2.10,打開 ConfigTool,點擊“在線讀取”。
2.在“EtherCAT”頁簽勾選“從站 DC 使能”,填寫與 HCPRO 相同的站地址 1001;在“ProfiNet”頁簽填寫設備名稱“RobotGW_01”,與 TIA 完全一致,否則PLC會報站名矛盾。
3.點擊“寫入并重啟”,網關重新上電后約 3 s 進入雙網 Ready 狀態,此時 ECT 與 PN 燈全亮,配置完成。
六、機器人端映射
ABB 6700 在 RobotStudio 新建系統,勾選“ProfiNet Device”選項,把 256 Byte Input 定義為“plc_to_robot”,256 Byte Output 定義為“robot_to_plc”。在 RAPID 代碼中通過 PackRaw/UnpackRaw 指令解包:
! 解包目標坐標
UnpackRaw plc_to_robot, 0, target_p.robax.rax_1;
! 打包實際坐標
PackRaw robot_to_plc, 0, actual_p.robax.rax_1;
如此即可在 1 ms 循環內把 PLC 運動學坐標下發給機器人,并把實際位置反饋回來。
七、同步與實時性驗證
1.Wireshark 抓包:EtherCAT 周期 250 μs,ProfiNet IRT 周期 1 ms,網關內部 FIFO 緩存 10 μs,無丟幀。
2.邏輯分析儀測量:禾川 PLC 的 DO 點置位到 ABB 機器人數字輸入響應平均 680 μs,滿足≤1 ms 項目指標。
3.連續 24 h 拷機:機器人重復定位誤差≤±0.03 mm,電芯堆疊錯位率由 2.8% 降至 0.1%,直接節約返工成本 60 萬元/年。

八、故障診斷與維護
1.網關自帶 WebServer,可實時查看雙網口報文計數、CRC 錯誤、丟包率;出現 PN 側斷線時自動把 EtherCAT 輸出清零,防止機器人飛拍。
2.禾川 PLC 程序內增加“心跳字”:每 1 ms 自增 1,機器人收到后原樣回傳;若 5 ms 未刷新,PLC 立即停機并報警“Gateway Sync Lost”,方便定位。
3.通過 ABB 示教器可在線監測 ProfiNet 站列表,若“RobotGW_01”圖標變灰,可快速判斷是否網關掉電或網線松脫。
九、總結
遠創智控 YC-PN-ECT工業級協議轉換網關以“雙從站”身份成功橋接禾川 EtherCAT 與 ABB ProfiNet,實測延遲<1 ms,丟包率 0%,讓新能源制造車間真正實現了“一個 PLC 世界,一個機器人世界”的無縫握手。
審核編輯 黃宇
-
plc
+關注
關注
5051文章
14594瀏覽量
486915 -
數據采集
+關注
關注
41文章
8038瀏覽量
120897 -
網關
+關注
關注
9文章
6782瀏覽量
56262 -
Profinet
+關注
關注
8文章
2276瀏覽量
28175 -
ethercat
+關注
關注
19文章
1511瀏覽量
45194
發布評論請先 登錄
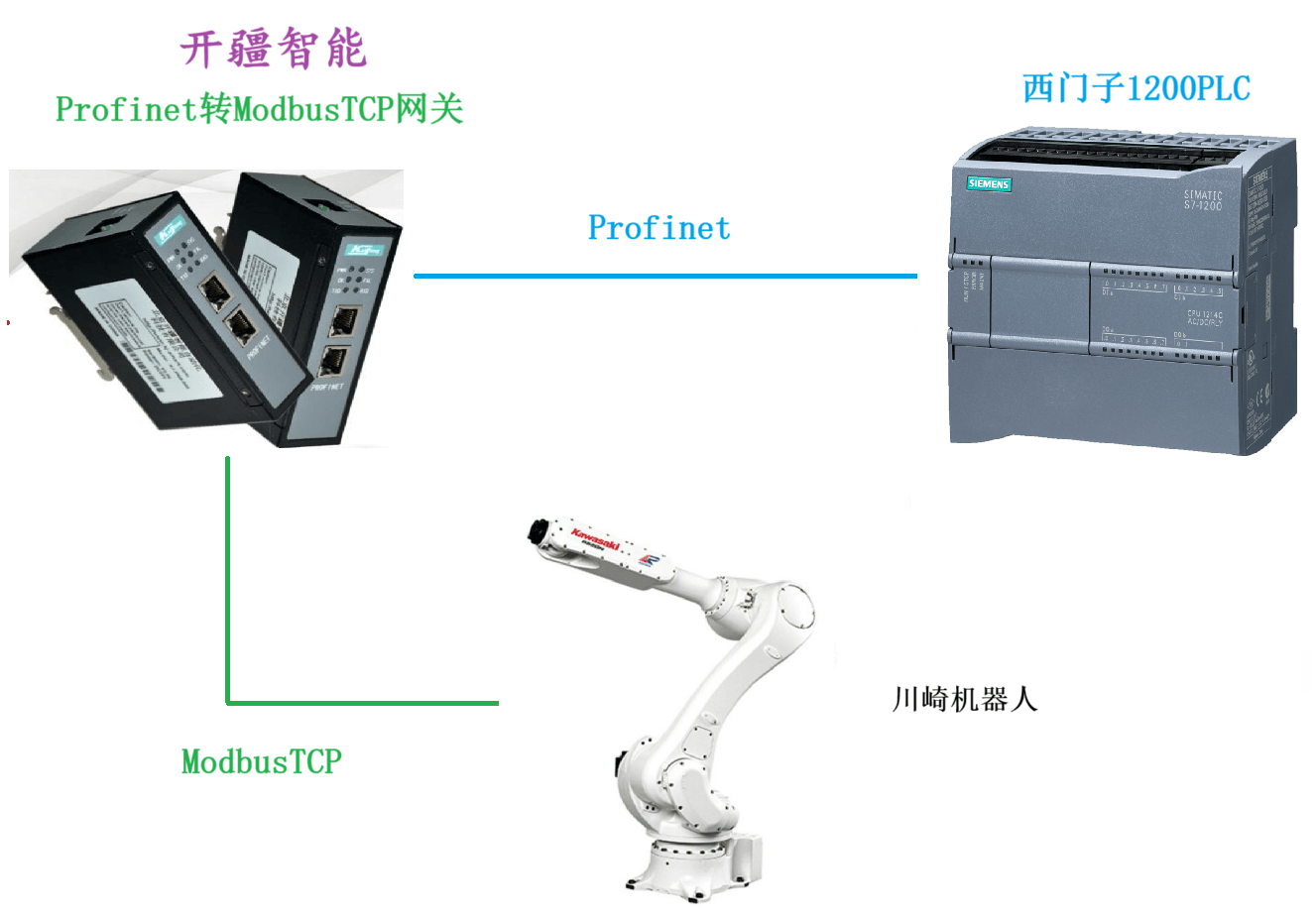
開疆智能ModbusTCP轉Profient網關連接西門子PLC與川崎機器人配置案例
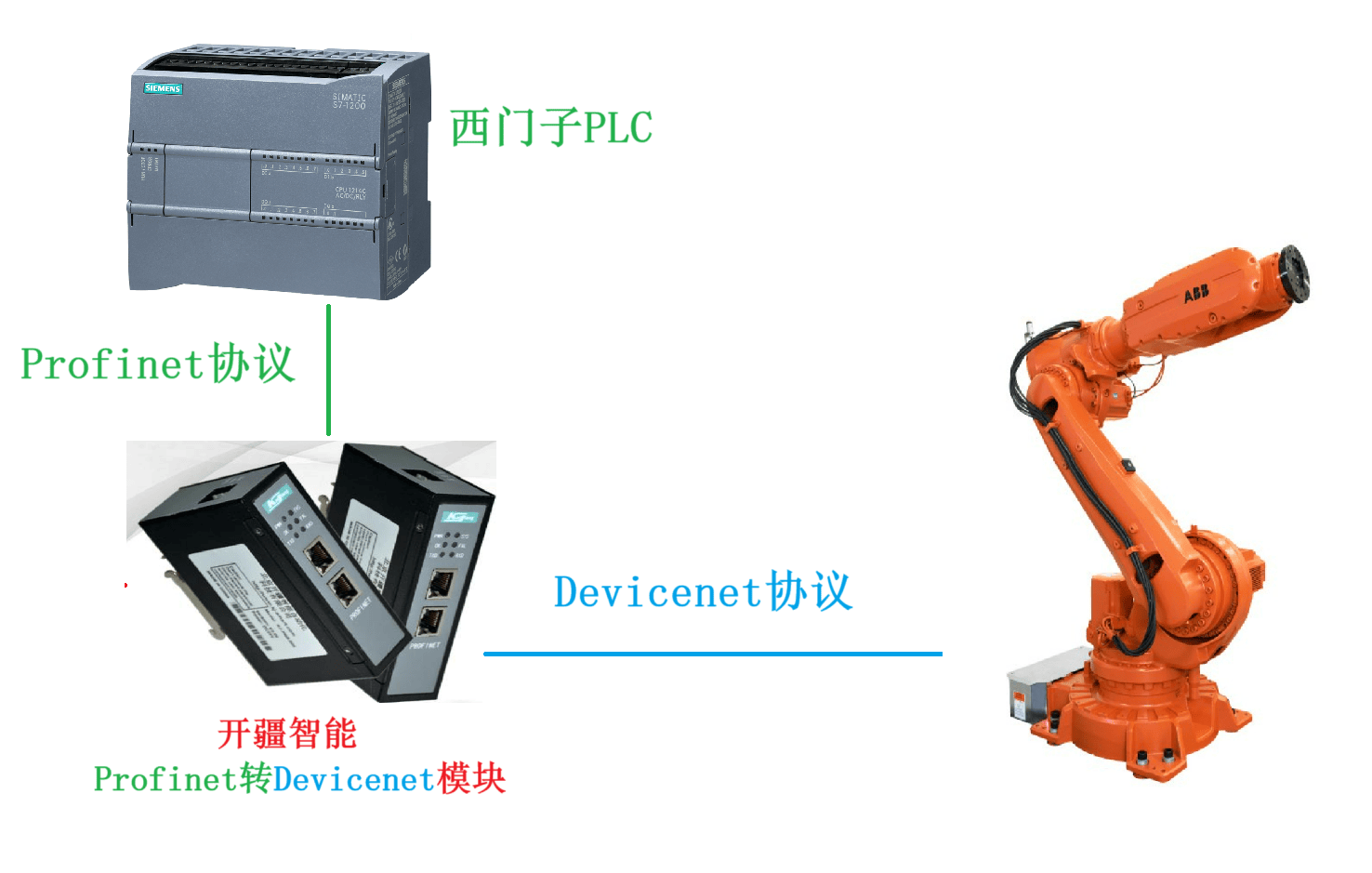
開疆智能Profinet轉Devicenet網關連接ABB機器人配置案例
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例

Profinet轉EtherCAT網關轉換與禾川的協同配置分析

禾川伺服驅動器與EtherCAT主站轉Profinet網關的雙向數據交換

EtherCAT主站轉Profinet網關與禾川伺服驅動器X4E快速通訊案例
EtherCAT主站轉Profinet網關接禾川伺服與PLC通訊的深度解析

EtherCAT主站轉Profinet網關接禾川伺服X4E系列通訊案例
EtherCAT主站轉Profinet網關接禾川伺服驅動器X5E快速配置案例
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
探尋西門子PLC與川崎機器人利用 Ethernet IP 轉 Profinet網關實現通訊的成功案例

開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例

Modbus轉Profinet賦予數據采集儀高效通信的超能力
ProfiNet轉EtherCAT構建禾川PLC對ABB機器人的高精度扭矩反饋網絡




 工商網監
工商網監
評論