") 數(shù)據(jù)標注的準確性會對自動駕駛產(chǎn)生什么影響?
數(shù)據(jù)標注的準確性會對自動駕駛產(chǎn)生什么影響?

[首發(fā)于智駕最前沿微信公眾號]每當提到自動駕駛模型,很多人關注的是模型的算法和采用的架構,但是對于給模型進行訓練的數(shù)據(jù),卻鮮有人去關注。其實一個模型想變得“聰明”,是需要給他不斷投喂數(shù)據(jù)讓其學習的,而這些數(shù)據(jù),也不是拿過來就能使用,而是需要人工或半自動的方式先對數(shù)據(jù)進行“標注”,這個過程就是告訴模型需要學習的內(nèi)容。
所謂標注,就是把傳感器采集到的如圖像、點云、雷達回波或視頻幀等原始信息轉(zhuǎn)換成模型能夠理解的標簽。在一張給出的交通場景的數(shù)據(jù)中,可以用三維包圍框圈出車輛,用折線畫出車道線,或標記出行人的動作狀態(tài)(站立、行走還是奔跑)。數(shù)據(jù)標注其實是一個流程化的工作,但如果標注不準確、不一致或覆蓋不全,即便模型本身再優(yōu)秀,也等于被“喂了糊涂飯”,最終會直接影響車輛在真實路況中的表現(xiàn),甚至帶來安全隱患。

標注的“準確性”指什么?
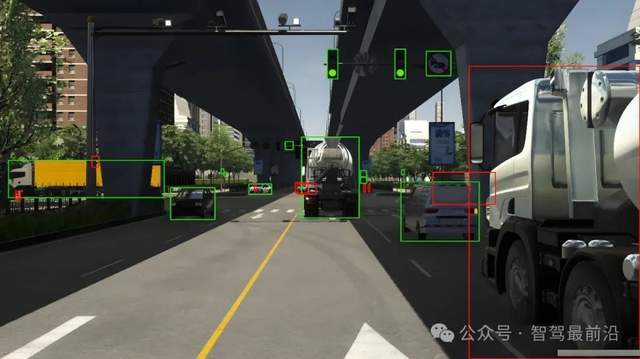
數(shù)據(jù)標注并不只是簡單的框選內(nèi)容,其實會有多個維度的考量。在語義層面要關注標簽是否正確識別了物體類別,比如在畫面中是一個電動滑板車,如果將其標注為“自行車”,則可能導致后續(xù)誤判。在幾何層面則要考慮目標的位置、朝向和尺寸是否精確,若三維包圍框中心點偏移幾厘米或邊界存在誤差,都會影響大模型跟蹤和距離估計。在時間一致性上的要求則體現(xiàn)在視頻或連續(xù)點云中,同一目標在不同幀之間是否保持一致的ID和軌跡,這對行為預測的準確性至關重要。邊界精細度則體現(xiàn)在語義分割模型能否精確識別出車窗、車身、反光條等組件細節(jié)。這將直接決定感知模塊對物體輪廓的識別精度。
自動駕駛數(shù)據(jù)標注標簽確認,圖片源自:網(wǎng)絡
綜上所述,數(shù)據(jù)標注的“準確性”指的是所有維度在質(zhì)量上達到良好、穩(wěn)定且一致的程度。對于標簽中存在的錯誤或不確定性的“標注噪聲”,也會滲入訓練過程,干擾模型學習的效果。

數(shù)據(jù)標注會出現(xiàn)哪些問題?
標注一致性差是數(shù)據(jù)標注過程中最常見也最隱蔽的問題。數(shù)據(jù)標注的不一致可能源于不同標注員對標準的理解不同,也可能是使用的工具或模板差異導致的。標注時微小的偏差,會在數(shù)十萬張訓練樣本中不斷累積,從而讓模型學到“平均化”的標注風格,導致模型在邊界場景中表現(xiàn)不佳。舉個例子,如果不同標注員對遮擋部分車輛包圍框的處理方式不一,模型在遇到遮擋時容易出現(xiàn)定位錯誤或漏檢的問題。
在實際的道路數(shù)據(jù)中,常見類別場景與稀有類別場景的分布其實是不均衡的。像是普通車輛與行人等數(shù)據(jù)是很常見的,但對于兒童、行動不便的殘障人士、工程車輛、應急車輛等關鍵但稀有的交通參與者卻鮮少出現(xiàn)。若這些重要但稀少的類別標注質(zhì)量不高、樣本數(shù)量不足,模型便難以在真實場景中準確識別它們。這類錯誤往往無法通過常規(guī)的準確率、召回率等整體指標反映出來,因為模型可能在99%的場景中表現(xiàn)優(yōu)異,卻在1%的關鍵時刻出現(xiàn)誤判,而這恰恰可能是引發(fā)嚴重事故的導火索。
時間標注錯誤也會讓預測模型學不到連續(xù)的運動模式,導致在交叉口或復雜場景中預測失效,進而引發(fā)決策模塊的危險選擇。幾何標注偏差對自動泊車和低速精密操控影響尤為顯著,幾厘米的誤差就可能導致刮擦或無法準確停入車位的情況出現(xiàn)。

自動駕駛數(shù)據(jù)標注,圖片源自:網(wǎng)絡
數(shù)據(jù)標注中的語義歧義問題也非常值得關注。某些物體在邊界情況下難以分類,像是折疊的手推車、臨時停靠的摩托車或被人搬運的大件物品等場景,不同標注員可能有不同判斷。如果不對這些邊緣情況制定統(tǒng)一規(guī)范,模型在實際道路中很難做出合理判斷。

標注不準會對自動駕駛系統(tǒng)產(chǎn)生什么影響?
目標檢測和語義分割模型高度依賴準確的空間和障礙物類別信息。如果訓練時三維框位置存在系統(tǒng)性偏差,模型就會學到錯誤的定位策略,導致在實際應用中距離估算錯誤、剎車點判斷不準。類別標注錯誤則可能讓模型將危險物體誤判為靜態(tài)障礙,從而錯誤預估其行為。語義分割邊界模糊會造成車道線或路緣識別不穩(wěn)定,進而影響車輛定位和路徑規(guī)劃。
如果數(shù)據(jù)標注不準,跟蹤與預測模塊也會深受影響。跟蹤器依賴每一幀穩(wěn)定的檢測結(jié)果來維持目標ID和速度信息。如果標注在時間上不一致,模型學到的軌跡會出現(xiàn)“斷裂”,在密集交通場景中就會大幅降低對目標未來運動的推斷準確性。預測模塊更加依賴行為標簽和歷史軌跡,標注誤差會阻礙模型學習典型的交互模式,導致車輛在復雜路況下做出不合理決策。
規(guī)劃與控制環(huán)節(jié)同樣會因數(shù)據(jù)標注不準確出現(xiàn)問題。規(guī)劃器通常依據(jù)感知輸出的空間信息與預測軌跡制定車輛下一步的動作。如果感知提供的障礙物位置出現(xiàn)偏差,或預測的速度不可靠,規(guī)劃器可能會制定過于激進或保守的行駛軌跡。控制模塊則會因參考軌跡不穩(wěn)定而頻繁調(diào)整,讓車輛出現(xiàn)頓挫式制動或轉(zhuǎn)向操作。
圖片源自:網(wǎng)絡
在自動駕駛系統(tǒng)中,模型的不確定性也被作為關鍵決策依據(jù)之一。如果因標注問題導致模型在訓練階段對某些場景處理的非常絲滑,在實際應用中就可能無法正確識別不確定性場景,從而難以觸發(fā)必要的如降速或請求人工接管等安全降級機制,更會埋下潛在風險。

如何提升標注質(zhì)量?
想要在數(shù)據(jù)標注過程中避免上面提到的問題,首先要做的就是建立清晰明確的標準。成熟的標注項目需要一套涵蓋類別定義、邊界處理規(guī)則、遮擋處理方法、最小可見像素閾值、幀間ID保持規(guī)則等內(nèi)容的詳盡且可操作的標注規(guī)范。規(guī)范制定后還要通過持續(xù)培訓和迭代來確保落實。標注員需通過示例學習,并配合考核與回訓機制,保證每個人對細節(jié)的理解一致。
工具的使用與流程的優(yōu)化對提升標注質(zhì)量同樣關鍵,高效的標注工具是確保數(shù)據(jù)質(zhì)量的基石,它能通過強制執(zhí)行格式與規(guī)則來減少人為錯誤。可以采用“自動預標注+人工校正”的人機協(xié)同模式來提升效率,這樣也可以讓標注員將精力集中于處理復雜樣本。此外,像是版本控制、標簽審核、批量修復與差異高亮等一系列工具功能與流程管理,也是提升整體標注質(zhì)量的關鍵環(huán)節(jié)。
想提升標注質(zhì)量,建立多維度的質(zhì)量控制機制也是很有必要的。想提升數(shù)據(jù)標注質(zhì)量,不能僅停留在單人抽檢,而應融合交叉審核、雙盲復核與統(tǒng)計檢測等流程。交叉審核有助于發(fā)現(xiàn)不同標注員之間的主觀差異;雙盲復核能有效評估標注結(jié)果的一致性;統(tǒng)計檢測則負責監(jiān)控整體數(shù)據(jù)的異常,如當某類物體的標注尺寸明顯偏離歷史常規(guī),或某位標注員的錯誤率顯著上升時,就應自動觸發(fā)復查流程。
數(shù)據(jù)標注是一個持續(xù)優(yōu)化的環(huán)節(jié),需要構建一個從“標注”到“訓練”、“驗證”再到“回歸”的數(shù)據(jù)閉環(huán)框架。因此可以借助主動學習或不確定性采樣等技術,篩選出模型最不確定或最容易出錯的樣本,將其優(yōu)先交由人工標注,從而高效利用資源以提升模型性能。在標注環(huán)節(jié)中發(fā)現(xiàn)的所有問題都應及時反饋給開發(fā)團隊,并將其作為迭代模型或更新標注規(guī)范的重要依據(jù)。
有效的度量與監(jiān)控也是確保標注質(zhì)量的關鍵。僅憑mAP或IoU等整體指標遠不足以評估標注對實際安全的影響,必須輔以精細化的場景指標。譬如可以專門監(jiān)控模型在霧天、夜間的檢測漏報率,或在近距離行人交互時的定位誤差。將這些場景化指標納入系統(tǒng)的評估與發(fā)布標準,才能把抽象的“標注質(zhì)量”轉(zhuǎn)化為具體、可監(jiān)控的指標。
3D數(shù)據(jù)的標注工作則需更加嚴格。點云數(shù)據(jù)本身具有稀疏、視角多變和反射等特性,這為包圍框的精確界定帶來了不小的挑戰(zhàn)。為此,必須嚴格校準坐標系與傳感器時間戳,并確保標注的一致性,從根本上避免空間偏差。此外,車道線及高精地圖相關的標注,因其直接服務于車輛定位與地圖構建,對幾何精度和采樣一致性的要求遠高于普通檢測任務,需要給予格外關注。

自動駕駛3D數(shù)據(jù)標注,圖片源自:網(wǎng)絡

最后的話
數(shù)據(jù)標注并不是一個簡單的框選操作,而是會直接影響自動駕駛可靠性的核心工作。必須將標注工作體系化、工程化,使其成為一個可衡量、可復現(xiàn)并能持續(xù)改進的系統(tǒng)工程。只有這樣,自動駕駛系統(tǒng)才能在復雜多變的路況中,獲得至關重要的安全基石。
審核編輯 黃宇
-
自動駕駛
+關注
關注
793文章
14883瀏覽量
179900
發(fā)布評論請先 登錄
大模型時代自動駕駛標注有什么特殊要求?

自動駕駛在顛簸路面如何確保感知準確性?

自動駕駛BEV Camera數(shù)據(jù)采集系統(tǒng):高精度時間同步解決方案

自動駕駛數(shù)據(jù)標注是所有信息都要標注嗎?

大模型中常提的快慢思考會對自動駕駛產(chǎn)生什么影響?

哪些環(huán)境因素會對電能質(zhì)量在線監(jiān)測裝置的校驗準確性產(chǎn)生影響?

交叉口的信號指示會對自動駕駛汽車產(chǎn)生什么影響?
如何確保自動駕駛汽車感知的準確性?

自動駕駛數(shù)據(jù)標注主要是標注什么?
什么是自動駕駛數(shù)據(jù)標注?如何好做數(shù)據(jù)標注?

測縫計測量數(shù)據(jù)的準確性和校準方法解析

自動駕駛汽車是如何準確定位的?

端到端數(shù)據(jù)標注方案在自動駕駛領域的應用優(yōu)勢
淺析4D-bev標注技術在自動駕駛領域的重要性
感知融合如何讓自動駕駛汽車“看”世界更清晰?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論