 舵機伺服編碼器
舵機伺服編碼器

舵機伺服編碼器是用于實時檢測舵機輸出軸位置、速度或角度的核心反饋元件,它能將機械運動轉化為電信號,讓控制系統實現對舵機的精準閉環控制。
這個問題切得很準,它直接指向了舵機 “精準控制” 的關鍵所在 —— 沒有編碼器的反饋,舵機就無法判斷自身是否到達目標位置,控制精度會大幅下降。
核心作用:實現 “閉環控制”
舵機伺服編碼器的本質是為舵機提供 “位置反饋”,其核心作用體現在以下 3 點:
位置檢測:實時讀取舵機輸出軸的當前角度,將機械角度轉化為脈沖或數字信號傳遞給控制器。
誤差修正:控制器對比 “目標角度” 與編碼器反饋的 “實際角度”,計算誤差后調整輸出信號,驅動舵機修正偏差。
速度監控:部分編碼器可通過單位時間內的脈沖數計算舵機轉速,輔助實現速度控制或過載保護。
常見類型及特點
不同類型的編碼器適用于不同精度和場景需求,主流分為兩類:
| 類型 | 核心原理 | 優點 | 缺點 | 適用場景 |
|---|---|---|---|---|
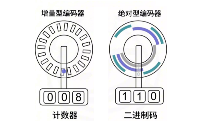
| 增量式編碼器 | 輸出連續脈沖,通過計數確定位置變化 | 結構簡單、成本低、響應快 | 斷電后丟失位置信息,需重新校準 | 對成本敏感、無需斷電記憶的場景,如玩具、低端機械臂 |
| 絕對式編碼器 | 每個角度對應唯一數字編碼,直接輸出絕對位置 | 斷電保留位置信息,精度高、抗干擾強 | 結構復雜、成本高 | 高精度、需斷電記憶的場景,如工業機械臂、醫療設備、自動駕駛轉向系統 |
關鍵性能參數
選擇或評估編碼器時,需重點關注以下 3 個核心參數:
分辨率:單位為 “線數 / 圈”(PPR),表示編碼器旋轉一圈輸出的脈沖數(增量式)或最小可識別角度(絕對式)。線數越高,角度檢測越精準。
精度:指編碼器測量值與實際角度的偏差,通常以 “弧分” 或 “弧秒” 為單位(1 度 = 60 弧分 = 3600 弧秒),精度越高,控制誤差越小。
響應速度:表示編碼器處理高速旋轉的能力,通常以 “最大轉速”(rpm)或 “最高脈沖頻率”(Hz)衡量,需匹配舵機的最大運行速度。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
舵機
+關注
關注
17文章
376瀏覽量
43261 -
伺服編碼器
+關注
關注
5文章
20瀏覽量
3417
發布評論請先 登錄
相關推薦
熱點推薦
伺服電機正余弦編碼器的相位對齊方式
伺服電機正余弦編碼器的相位對齊,本質上是為了讓編碼器反饋的位置信號與電機轉子實際的磁極位置(電角度)建立精確的對應關系。這是實現矢量控制、確保電機平穩出力、避免飛車的基礎。 根據操作原理和依賴的設備

磁鐵在編碼器中的作用與應用
在編碼器中,磁鐵的作用不可小覷,常用的磁性材料主要是釹鐵硼和鐵氧體,今天這篇文章主要介紹下磁鐵用于哪些編碼器類型,以及其具體作用。磁鐵在編碼器中的作用(功能)是什么?在編碼器中,磁鐵主

面向高速伺服的磁感應編碼器芯片信號處理技術
高速伺服系統(轉速≥60000 r/min)對位置反饋的實時性、精度與穩定性提出嚴苛要求,磁感應編碼器憑借非接觸式測量、抗惡劣環境等優勢,已成為核心位置檢測器件。然而,高速工況下磁編碼器輸出信號易受
舵機與伺服電機的區別是什么?
舵機與伺服電機都屬于 可精確控制的驅動裝置 ,但二者在定義范圍、結構組成、控制方式和應用場景上存在顯著差異,并非完全等同(舵機是伺服電機的 “特殊子集”)。以下從核心維度展開對比,幫助
伺服增量編碼器:工業自動化的精密之眼
在智能制造的浪潮中,伺服系統作為工業自動化的核心驅動單元,其性能直接影響著設備精度、效率與穩定性。而伺服增量編碼器,作為伺服系統的“精密之眼”,正以高分辨率、快速響應與低成本優勢,成為
國產編碼器在人形機器人領域的進展
電子發燒友網綜合報道?編碼器是測量旋轉角度、位移及速度的傳感器,作為伺服系統的核心部件,在人形機器人領域,其數據反饋對實現機器人運動的精密控制與定位至關重要。 ? 編碼器種類豐富,按技
Bourns發布全新增量式微型編碼器
Bourns 推出 PEC04 系列 4 mm 增量式微型編碼器、PEC05 PEC05 系列 5 mm 增量式微型編碼器,以及 PEC06 型號 6 mm 增量式微型編碼器。Bourns 全新微型
伺服絕對值編碼器:工業精密控制的“智慧之眼”
在智能制造的浪潮中,伺服系統作為工業自動化的核心動力,其定位精度與響應速度直接決定了生產線的效率與產品質量。而伺服絕對值編碼器,作為伺服系統的“智慧之眼”,正以不可替代的技術優勢,成為
伺服電機編碼器安裝與維護最佳實踐:優化性能與延長系統壽命
在現代工業自動化的大舞臺上,伺服電機編碼器就像是一位默默無聞卻至關重要的幕后英雄。它精準地測量和反饋電機的位置、速度等關鍵信息,確保整個系統能夠高效、穩定地運行。然而,要讓這位“英雄”充分發揮其作用
集成16位超高分辨率磁編碼器的機器人舵機解決方案
隨著機器人技術的快速發展,對運動控制精度的要求越來越高。傳統機器人舵機通常采用電位器或普通磁編碼器作為位置反饋元件,但這些方案在分辨率、抗干擾性和可靠性方面都存在一定局限。本文將詳細介紹一種集成16位超高分辨率磁

MT6816磁編碼器的伺服系統小型化與高性價比設計
在工業自動化和機器人技術領域,伺服系統的性能直接影響設備的精度和響應速度。作為伺服系統的核心部件,磁編碼器的性能優劣直接決定了整個系統的表現。MT6816磁編碼器憑借其高精度、小型化和

集成MT6816磁性角度編碼器實現伺服電機緊湊型非接觸位置傳感
隨著工業自動化技術的快速發展,伺服電機作為核心執行元件,其位置檢測精度和可靠性直接影響系統性能。傳統光電編碼器存在易受污染、抗震性差等固有缺陷,而磁性編碼器憑借非接觸式測量、抗干擾能力強等優勢,正
絕對值編碼器與增量式編碼器相比有哪些優勢?
絕對值編碼器與增量式編碼器相比有哪些優勢?核心功能:斷電后位置信息不丟失,絕對值編碼器:通過機械結構或電子存儲(如電池備份),能實時輸出當前位置的唯一絕對值編碼(如二進制、格雷碼)。無
增量型編碼器與絕對值型編碼器怎么選擇?
在選擇增量型編碼器與絕對值型編碼器時,需要考慮多個因素,包括應用需求、成本、精度、可靠性以及環境適應性等。以下是對兩種編碼器的詳細比較及選擇建議: 一、增量型編碼器 1. 優點: ?
什么是伺服電機編碼器?作用/關鍵技術/選型等一起看看吧!
什么是伺服電機編碼器?
伺服電機編碼器是伺服系統中的核心反饋元件,用于實時檢測電機的轉速、位置、角度等參數,并將信號反饋給控制




 工商網監
工商網監
評論