 IMU?P/N?470-4959在卡特彼勒挖掘機和平地機坡度控制中的應用
IMU?P/N?470-4959在卡特彼勒挖掘機和平地機坡度控制中的應用

在土方工程中,挖掘機與平地機的作業精度直接影響到施工質量與效率。坡度控制作為核心環節,需應對復雜地形帶來的動態挑戰。直川科技開發的IMUP/N470-4959通過融合三軸加速度與三軸陀螺儀數據,為設備坡度控制系統提供了高精度的姿態感知基礎。
一、坡度控制的技術需求
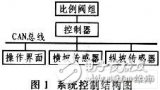
挖掘機在邊坡修整時,需實時監測鏟斗與機身的相對姿態;平地機在精平作業中,刮刀的水平度誤差會直接引發鋪料厚度不均。IMUP/N470-4959通過6軸數據融合,可輸出設備在三維空間中的全姿態參數,為液壓控制系統提供閉環調節依據。
二、技術特性與工況適配
傳感器采用MEMS技術,結合卡爾曼濾波算法,在輸出三軸加速度與角速度的同時,通過陀螺儀補償設備振動引起的噪聲。5P接插件具備IP67防護等級,適應工地高粉塵與潮濕環境。基于CAN總線協議,傳感器可直接接入卡特彼勒機載控制系統。
三、典型應用場景分析
在挖掘機邊坡作業中,IMU同步監測動臂俯仰角與機身滾動角。當檢測到鏟斗軌跡偏離設計坡度時,系統自動調整液壓缸行程。某公路項目實踐表明,該方案將邊坡平整度偏差顯著降低。在平地機作業中,通過IMU實時反饋刮刀滾動角,系統可鎖定預設橫坡值,確保坡面一致性。
四、可靠性驗證與行業價值
在連續性工程測試中,傳感器經歷沙塵與溫差循環后,輸出數據穩定性仍符合工程機械標準。隨著智能施工技術發展,多軸IMU正從單一姿態監測節點向控制核心演進。結合BIM設計模型可實現設備自動作業,通過數字孿生平臺可預測性調整作業參數。
直川科技通過優化P/N470-4959的環境適應性與數據融合能力,為卡特彼勒挖掘機和平地機提供了高可靠性的坡度控制解決方案。實踐表明,基于工業標準設計的IMU已成為工程機械智能化升級的關鍵組件。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
挖掘機
+關注
關注
0文章
31瀏覽量
10682 -
IMU
+關注
關注
6文章
405瀏覽量
47627
發布評論請先 登錄
相關推薦
熱點推薦
角度傳感器成功應用于平地機推土機
`平地機或推土機等的刮刀橫坡角度測量,一直是難以真正解決的技術難題,市場上目前主要采用的以質量擺并填充硅油阻尼的原理的橫坡傳感器,不能很好地解決橫坡角度測量,主要體現在:1、平地機或推土機
發表于 07-11 17:11
利用CAN總線原理設計的平地機自動找平系統
自動找平系統可使平地機按照操作員預先設定的縱坡和橫坡值進行自動控制,從而使平地機自動操作,保證平地機按照設定值精確平整路面。該控制系統包括橫
發表于 07-13 14:10
?3432次閱讀

平地機遠程監控運維管理系統解決方案
不明確等,這些問題亟待解決。 數之能推出的設備運維管理平臺可以接入多種類工程機械,包括如平地機、挖掘機、起重機等,實現設備全生命周期管理、故障報警、運維管理與遠程維護等功能,助力設備制造商打造更好的售后服務

IMU P/N312-0755在卡特彼勒挖掘機上的應用實踐
直川科技通過持續優化IMU傳感器的環境適應性與數據可靠性,為卡特彼勒挖掘機提供了兼顧精度與穩健性的姿態感知方案。其
IMU P/N 333-8538在卡特彼勒挖掘機、自卸車與裝載機中的應用價值
IMU P/N 333-8538通過集成三軸陀螺儀與加速度計,為卡特彼勒重型設備提供六自由度運動

三軸加速度計P/N 336-9655在卡特彼勒履帶式推土機與小型挖掘機中的監測應用
三軸加速度計P/N 336-9655通過同步測量X/Y/Z軸加速度及Z軸側滑速度,為卡特彼勒履帶式推土機

三軸傾角P/N373-6538在卡特彼勒履帶式推土機與輪式鏟運機中的監測應用
三軸傾角傳感器P/N373-6538通過同步監測X/Y/Z軸傾角與動態補償算法,為卡特彼勒D8T推土機

IMU P/N 563-0598在卡特彼勒物料操作機、挖掘機、平地機與重卡中的精準運動監測與應用解析
直川科技IMU P/N 563-0598通過三軸加速度、滾動角等六參數同步測量,結合工業級防護與數據冗余設計,為卡特彼

IMU P/N 596-7347在卡特彼勒挖掘機、裝載機與物料操作機中的精準運動監測應用解析
IMU P/N 596-7347通過實時監測工程機械的姿態與運動數據,為設備精準控制和安全運行提供關鍵支持。其在

IMU P/N 616-4042在卡特彼勒裝載機與挖掘機中的精準運動控制與可靠性實踐
IMU P/N 616-4042通過PWM輸出和工業級接插件設計,為卡特彼勒裝載

加速度計P/N 619-1883在卡特彼勒履帶式推土機坡度檢測中的精準應用與可靠性實踐
直川科技加速度計P/N 619-1883專為卡特彼勒履帶式推土機





 工商網監
工商網監
評論