 服務機器人核心技術與模塊解析
服務機器人核心技術與模塊解析

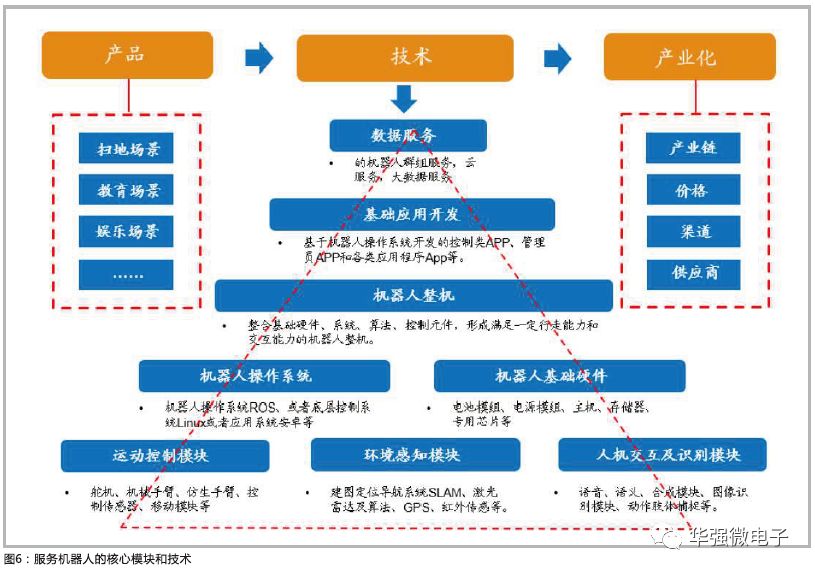
服務機器人產業鏈的特點是產品和技術交叉纏繞
服務機器人產業鏈上游是元器件廠商,包括芯片、激光雷達、舵機等,這些廠商是典型的技術驅動型,并且如果中下游出現快速爆發,則產能可能成為制約因素;中游包括語音提供商和圖像提供商,這個版塊相對比較獨立,數據和算法是其核心競爭力,中游產品板塊包括從設計、加工一直到營銷,品牌、渠道和產能是其核心壁壘,如果做產品的公司能夠通過操作系統建立起生態圈,將成為其重要壁壘,中游的語音圖像板塊和做產品的板塊通過虛擬和實體向下游各個場景的消費和流通環節進行滲透,各個場景按照產業化的難易程度進行產品的迭代放量,成為中上游的強力引擎。
掃地機器人:最成熟、最容易產業化的應用場景
2.1 服務機器人應用場景分為三個層次
當強大的消費需求驅動行業變革時,必然會帶動技術的快速提升和成本的不斷下降,服務機器人具備消費品屬性,歸根結底還是需求驅動,將從具體場景出發放量。
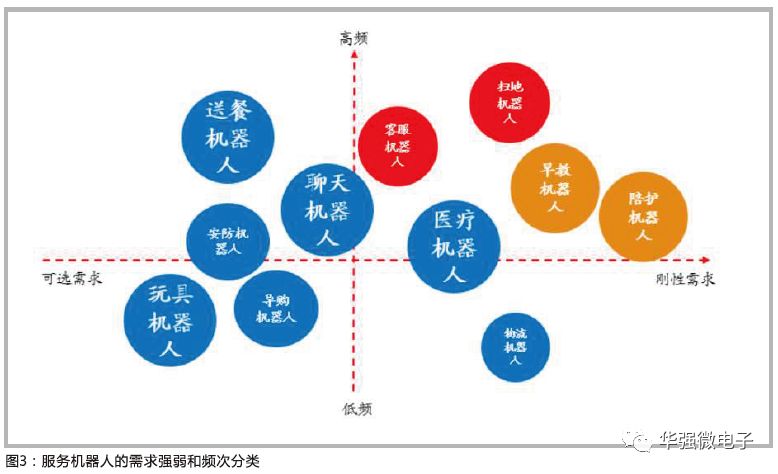
服務機器人的需求在于兩點:是否剛性需求和使用頻次,其強弱頻次決定了場景。需求越強,頻次越高的服務機器人場景越容易催化放量,目前產業化最成熟的是掃地機器人和客服機器人,其背后是高頻需求的帶動,發展迅速的是陪護機器人和早教機器人,其背后是剛性需求的推動,而其他機器人由于頻次和需求均不及前述機器人,所以在產業化中處于相對初級的階段。

服務機器人需求場景根據市場化程度,可分為三類:原有需求升級、現有需求滿足、未知需求探索。原有需求升級是市場已經存在的,包括早教機器人、掃地機器人等,早教機器人相比學習機增加了人機交互的內容,掃地機器人相比吸塵器增加了自主的路徑屏蔽算法;現有需求滿足是由于機器人采購成本低于人工成本而采用服務機器人,包括智能客服、陪護機器人等;未知需求探索在現階段的需求并不強烈,如管家機器人等。
2.2 掃地機器人:依托成熟的應用場景,率先實現產業化
既有需求場景的核心是服務機器人在現實中可以找到映射產品,例如學習機之于早教機器人、吸塵器之于掃地機器人等。這類產品是所有產品類型中最容易放量和實現產業化的,原因在于:用戶基數廣闊、需求明確、用戶教育成本低。
掃地機器人以智能化掃地作為需求基礎,以替換人類勞動,解放雙手為切入點,正在全球范圍內掀起需求爆發增長的浪潮。相比于人工掃地和吸塵器掃地,掃地機器人的智能性取決于其人工智能技術的先進性,體現在三個方面:一是覆蓋率:算法高效,漏掃少,覆蓋率高;二是自主清掃能力:輔助清掃按鍵少,無需人工輔助;三是環境適應與判斷能力:根據家具環境做出靈活反映。
國內掃地機器人產業鏈的核心在于中游本體制造商。從我國掃地機器人目前的產業鏈構成來看,上游部件主要是機電設備、電池、主板芯片等零部件行業,中游本體制造中,包括兩類企業,一類是自己擁有獨立品牌的自主品牌商,另一類是給國外品牌做ODM和OEM代工的企業。下游流通環節中,主要是線下實體店+線上渠道為主,并且線上渠道目前有超越線下渠道的趨勢。目前產業鏈的核心,仍然掌握在中游的本體制造商手中,尤其是具備自主品牌的本體制造商,享有的議價能力更強。
目前國內掃地機器人企業大致可以分為三個梯隊集團。根據中怡康時代的數據,國內掃地機器人行業企業的三個梯隊分別是:(1)科沃斯在國內市場憑借先發優勢形成第一梯隊,在產品研發能力,產品體系和產能創新能力方面都領先其他梯隊的公司,其占率大約在50%左右;(2)第二梯隊主要是國際巨頭IRobot和近年來逐步崛起的小米掃地機器人(石頭科技),其在國內合計的市場率約20%-25%;(3)第三梯隊包括了一些國產的品牌和一些原有的傳統家電企業,以浦桑尼克、福瑪特、飛利浦海爾、美的等。傳統家電類企業在轉型方向進入比較遲,但是擁有渠道優勢,后續發展空間不容忽視。
服務機器人核心技術與模塊解析
3.1 智能機器人三大核心技術模塊:感知+交互+運控
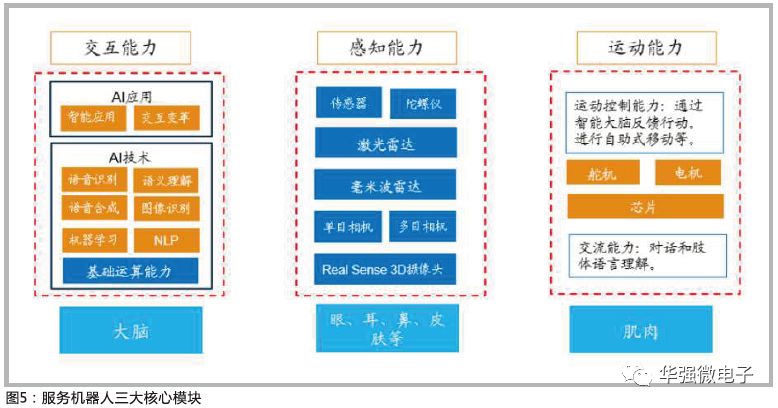
服務機器人包含三大核心技術模塊:人機交互及識別模塊、環境感知模塊、運動控制模塊。交互模塊包括語音識別、圖像識別等,相當于人的大腦;感知模塊借助于各種傳感器、陀螺儀、激光雷達等,相當于人的眼、耳、鼻、皮膚等;運控模塊包括舵機、電機、芯片等。依托于三大模塊,機器人有基礎的硬件:電池模組、電源模組、主機等,還有操作系統:ROS、Linux等;由硬件和操作系統構成機器人整機,整合基礎硬件、系統、控制元件,形成滿足一定行走能力和交互能力的機器人整機。
服務機器人的各個細分模塊中,語音模塊重要性和成熟度均最高,語義模塊是目前突破重點,運控模塊相對重要性最弱。服務機器人三大模塊可以繼續細分為語音模塊、語義模塊、圖像模塊、感知模塊、運控模塊、芯片模塊。
從技術儲備上來看,人工智能是核心。目前的技術儲備方面,只有語音和OCR領域具備一定的成熟度。語音和OCR領域已發展接近20年,在某些特定場景和行業已經有了一些數據基礎。其他的技術包括圖像識別、語義分析都還在很早期的階段。語音領域,也是目前已知的平臺類企業最大的板塊。
3.2 感知模塊:激光雷達是核心,多傳感融合是必備
多傳感融合保證安全,技術難點在于激光雷達。激光雷達、毫米波雷達、3D攝像頭等多種傳感器在功能上的冗余,保證了服務機器人的安全性和正常使用。其中激光雷達是繞不開的核心。激光雷達的原理是:通過發射n條激光利用三角測距原理(低成本方案)或TOF(Time of Flight,高成本方案)來測量周圍物體與自身的距離,獲得精度較高的距離信息——點云數據。
服務機器人如果要實現精確的服務,除了精準的定位,還需要結合定位信息對環境進行識別,這就需要運用到SLAM技術,而激光雷達則是SLAM的重要入口。
SLAM(Simultaneous Localization And Mapping)的含義是即時定位與地圖構建。機器人在完全未知環境中創建地圖,同時利用地圖進行自主定位和導航。SLAM問題可以描述為:機器人在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和傳感器數據進行自身定位,同時建造增量式地圖。這種自主定位導航需要三大技術:實時定位、地圖繪制和路徑規劃,其中最核心的就是路徑規劃。
以掃地機器人為例:國際上有一個標準場地,80平米,沒有導航模塊的一般會在40多分鐘,80%的清潔率。而裝上SLAM模塊后,10分鐘就達到了95%的覆蓋率。如果把視野放到其他領域,必須要非常高效的移動到目的地,這是不可繞過的技術方案。我們可以做一個簡單的對比:
視覺定位技術:定位范圍是0.1-2米,無法獲得地圖,需要配額外的傳感器才能躲避障礙物,需要合理的光源才能適應環境;穩定性比較差;
激光雷達+SLAM技術:定位精度可以控制在0.01-0.1米,并且可以獲得精確的地圖;支持自主躲避障礙,不會產生累計誤差。

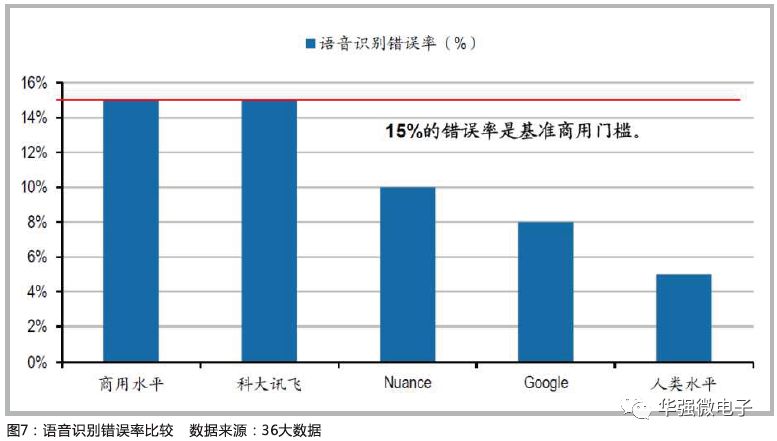
3.3 交互模塊:語音已達商用門檻,語義理解尚需時日
交互模塊的分析路徑:交互界面通過接受外界的輸入系統的信息,通常是語音采集,經過語音解碼后,導入到既定的知識庫做語義匹配,進行邏輯處理,最后經過語音合成后,根據外部需求選擇輸出語音還是文本。整個模塊最重要的是語音識別和語義分析兩部分。根據不同的模式,語義分析可以包括很多種,進文本,出語音;進語音,出語音;進語音,出文本等。進語音、出語音最難。
語義理解仍需時日。自然語言分析技術大致分為三個層面:詞法分析、句法分析和語義分析,其中詞法和句法基本解決,語義目前僅是淺層處理。
自然語言處理難點:詞義消歧是瓶頸,中文相對英文更難。自然語言處理有幾個難點:切詞(中英文自然語言處理都有一個先行環節,就是把輸入的字符串分解成為詞匯單位)、詞類標注、語法理論和詞義消歧。中文語義難理解是世界公認,具體包含幾個方面:(1)中文歧義較多,語法結構復雜,交流語境與表達意思差別較大;(2)語義分析領域,幾乎全部用到的是深度學習、高級神經網絡等算法。啟發式算法并不能窮盡所有情形,只能形成局部解,所以總會存在瑕疵;(3)語義知識庫的建立是一個長期的過程,目前語義分析發展還在比較早期。
3.4 運控模塊:步態與非步態的共生
運動控制是三大模塊中最不重要的,因為服務機器人與過去的工業機器人不同,對精確控制要求比較低,核心仍然是算法和交互體驗。
步態行走側重于精準控制,非步態行走主要是簡單移動。從外觀來看,服務機器人的行走方式有兩種,步態和非步態。步態行走包括液壓控制和電機控制,典型代表是Nao機器人、Asimo機器人和Atlas等,國內典型是優必選;非步態行走主要是電機控制,結構較為簡單,主要是在機器人底部裝上萬向輪,供其簡單移動。典型代表是Pepper和康力優藍。
-
服務機器人
+關注
關注
9文章
596瀏覽量
54449 -
掃地機器人
+關注
關注
21文章
851瀏覽量
55720
原文標題:【深度】服務機器人應用場景及技術解析
文章出處:【微信號:robotn,微信公眾號:產業大視野】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
江智機器人技術核心團隊

服務機器人線圈在人形機器人核心系統中的技術價值
Infineon移動機器人電機控制方案深度解析
遠心鏡頭核心技術解析與應用

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知

AGIROS開源社區Meetup上海站圓滿落幕,RT-Thread睿賽德分享核心技術賦能機器人開發|新聞速遞

晶體晶振在機器人五大核心模塊的關鍵作用

語音機器人交互系統:核心技術與應用挑戰
機器人芯片:驅動智能機器的核心技術引擎
廣汽人形機器人GoMate的五大核心技術
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用




 工商網監
工商網監
評論