 前饋加反饋的自動轉向控制方案
前饋加反饋的自動轉向控制方案

文章提出了一種前饋加反饋的自動轉向控制方法,在前饋控制方法中考慮車輛運動學關系、輪胎不足轉向等因素,而反饋控制方法根據車輛位置與目標軌跡之間的偏差進行補償轉向轉角,解決因靜態方向盤轉角誤差、外界側向風及彎道下車輛高速離心力等多種因素導致的車輛橫向偏差。經過實車試驗驗證,該算法在多種場景下進行測試,驗證了該算法的可靠性與穩定性。
智能駕駛系統包括以下幾個部分:感知、融合、定位與地圖、決策與控制。其中,決策與控制是車輛行駛性能的關鍵,決策模塊根據感知、融合的數據,實時規劃出一條目標路徑、車速以及加速度等[1];車輛控制模塊,根據實時的目標路徑計算出方向盤目標轉角。
文獻 [2][3] 設計了橫向軌跡 PID 閉環控制,該算法能夠在中低速工況下穩定跟蹤目標路徑,但在高速工況下目標軌跡跟蹤容易引起車輛超調與姿態發散。文獻 [4][5] 設計了基于模型預測的軌跡跟蹤控制方法,該算法通過尋優算法,設定約束條件,尋求最優的目標軌跡,能夠實現部分的優化控制。
但在實車實驗中發現,針對橫向控制問題難以設計出適當的目標優化函數、合理的約束條件以及較小的計算量,使得算法在實車上難以獲得較好的性能。
本文結合車輛運動學采用前饋控制計算目標轉角,以及結合道路狀態的反饋路徑偏差閉環修正實現車輛的實時閉環控制。該控制算法可擴展性好,適應性強,能夠應用于各種場景下的控制,通過實車試驗驗證了該算法的通用性、可靠性。
1. 軌跡跟蹤橫向控制框架
軌跡跟蹤控制是銜接智駕系統與原車控制系統的關鍵要素,其中智駕系統根據感知環境、地圖等信息計算出實時的局部路徑與車速等信息,而 VCU 會在收到上層發送的軌跡后,根據車輛的特性合理地控制方向盤轉角、油門、制動、檔位等。其中,方向盤轉角是車輛行駛控制的難點。
首先,需要將底層被動的電動助力轉向更改為主動電動轉向,并且對轉向的響應速度、轉角精度均具有很高的要求。其次,根據目標路徑計算目標轉角,讓車輛能夠平順地安全行駛。

圖 1 軌跡跟蹤轉向控制系統框架
圖 1 中包括基于運動學的預瞄前饋控制、橫向誤差反饋閉環控制、轉向不足特性修正、人機模式切換時方向盤平滑處理。其中,人機模式切換時,方向盤平滑處理主要解決進入智能駕駛瞬間方向盤突然轉動而可能出現打手的現象,為此對切換瞬間時方向盤轉角轉動進行平滑處理,使得車輛行駛穩定性更好。
下面將詳細介紹其他各模塊。
1.1 決策與控制信號通訊
決策是根據感知、地圖、定位等規劃出實時的局部目標路徑,該路徑以車輛后軸中心為規劃原點,通過車輛預瞄全局路徑某一點,分別計算出按照運動學關系每 1 m 車輛的未來運動點位置,通過預瞄獲得車輛原點至目標全局路徑貼近的短距離局部路徑若干點[6]。通過將若干點擬合出三階方程,并將 X、Y 的三階擬合系數發送給 VCU 進行解碼控制。

式中: a1、b1、c1、d1、a2、b2、c2、d2 為三階方程的擬合系數;η 為預瞄長度占局部軌跡規劃長度的百分比。
道路曲率半徑是根據車輛行駛的道路,在全局道路上每 1 m 取 1 個點,3 個點兩兩之間計算轉彎半徑,然后可以計算一段距離內的道路最小轉彎半徑。VCU 可以根據道路最小轉彎半徑得到未來道路的情況選擇對應的控制方法,解決高速彎道上離心力的控制問題。
路徑跟蹤誤差是根據車輛當前的橫向位置與全局路徑的橫向位置偏差,若車輛與全局路徑有偏差,規劃的路徑會將車輛引導至全局路徑。但考慮到方向盤的靜態偏差角度、外界側向風或離心力等因素,會導致車輛實際位置與目標軌跡會有一定的偏距,使得車輛并不是行駛在車道中心。為此,輸出該誤差值用于反饋的補償控制,能夠解決相關問題。
換道指令是指車輛決策算法規劃出換道的路徑,但在彎道上車輛向內道并線時,按照直道上的換道控制方法,車輛難以實現正常向內線并線。為此 VCU 在接收到換道指令后,按照正常的換道控制方法,若在設定時間內未完成換道,意味著離心力阻止了車輛換道成功。為此,進入換道補償控制,逐漸增大方向盤轉角,實現成功換道。
1.2 轉向前饋控制
駕駛員駕駛車輛時,在低速預瞄距離很近,而隨著車速越來越高,需要駕駛員預瞄的距離也越遠 [7][8]。為此,提出預瞄時間與車速的乘積為預瞄距離。

式中:Lmax 為預瞄長度;t 為預瞄時間;η 為路徑擬合的系數,范圍在 [0,1],其中 0 代表車輛后軸中心位置原點,而 1 代表規劃目標路徑的終點。通過 X、Y 可以計算出目標路徑點相對車輛后軸中心的位置。
根據運動學計算幾何關系,計算得到兩輪模型的前輪轉向角 θ = arctan [2 × W × B/(X^2 + Y^2)]。
經過實車測試發現車輛左右換道的時間不一致,左換道時間約比右換道時間少 2 s。考慮到決策與控制算法的左右換道對稱性,分析該處的問題原因在于機械轉向系統。根據試驗獲取的方向盤與左右車輪的轉角關系,并不是絕對對稱的關系,更不能采用固定傳動比控制方向盤轉角。
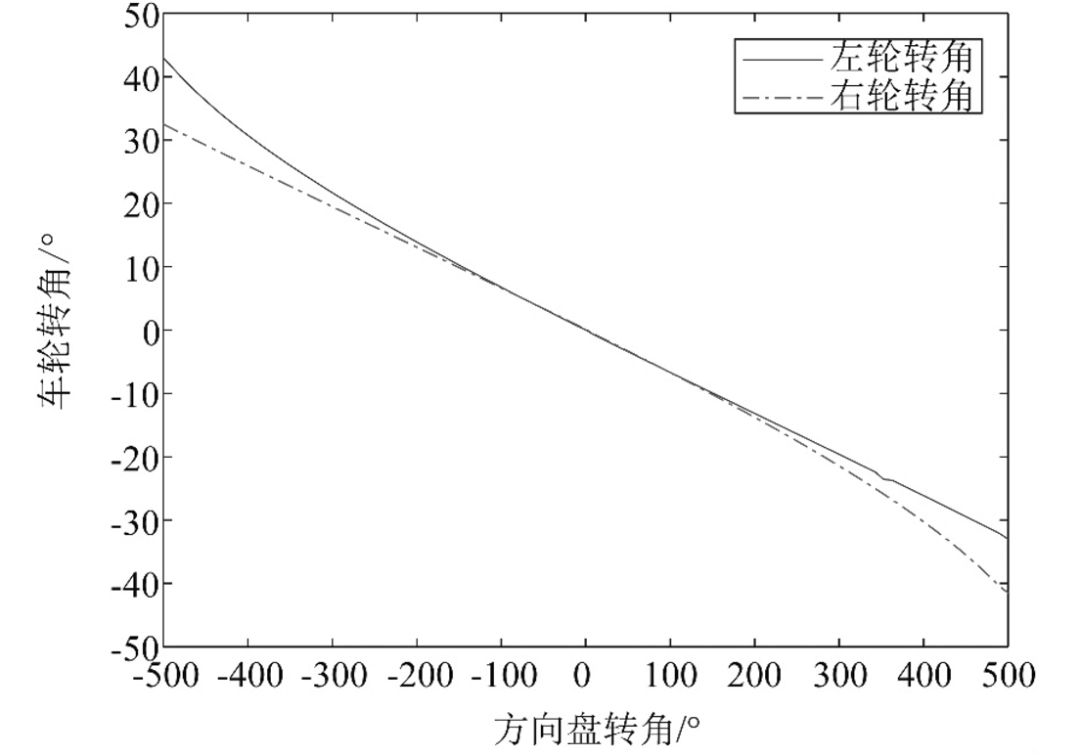
圖 2 方向盤轉角與左右車輪的轉角曲線
為此分別計算左右車輪的期望轉角為:

式中:W 為車輛軸距;B 為車輛的左右輪輪距。
方向盤轉角為:

式中:G 為車輪轉角插值 Map 獲得方向盤對應轉角。
在實車試驗時,發現生成的目標路徑左右晃動。使得車輛即便在走直線,方向盤也會來回擺動。為此采用方向盤轉角死區處理,防止方向盤轉角的不穩定晃動。
在試驗時發現在不同車速下過直角彎時性能差距較大,經過分析發現,在不同車速下,車輛的轉向特性不一致,因為輪胎隨車速表現出不同轉向的特性,在低速時轉向不足,中高速時中性轉向,為此在不同車速下進行非線性特性轉角補償。

1.3 轉角反饋閉環控制
相同的車型與相同的程序,進行長時間的試驗時,發現個別車輛在行駛時會始終存在穩定的跟蹤誤差。經過分析發現,方向盤零位會隨著車輛行駛時的機械零件松動而出現零漂,大約在[-5°,5°]。但在人工駕駛時,駕駛員是一個高度智能的決策與控制系統,能夠適應方向盤的輕度零漂。而智能駕駛汽車對方向盤的轉角閉環控制精度與響應速度要求較高,而零漂問題會影響車輛在高速下的控制穩定性。
在直道測試時,無側風,發現個別車輛始終存在穩定的跟蹤誤差。經分析,方向盤的靜態轉角偏差會導致車輛跟蹤有偏差,而側向風也會一定程度地影響車輛直線行駛。如何抵消這些外因與內因,保證車輛在直道的直線行駛,本文提出分別采用識別直道、彎道、換道 3 種工況,進行對應反饋補償的控制方法。

圖 3 直道路徑跟蹤偏差轉角補償控制
圖 3 為識別道路為直道時,若出現一個方向的橫向跟蹤誤差并且無法減小,說明前饋控制算法無法消除該系統的偏差,為此會在幾秒時間后通過慢慢修正方向盤轉角來逐漸減小固定的橫向偏差。同時需要設定一個合理的安全帶,以避免車輛出現周期性的超調。經過大量的試驗驗證,該算法適應不同的方向盤靜態誤差和外界側向風進行高速無人駕駛。
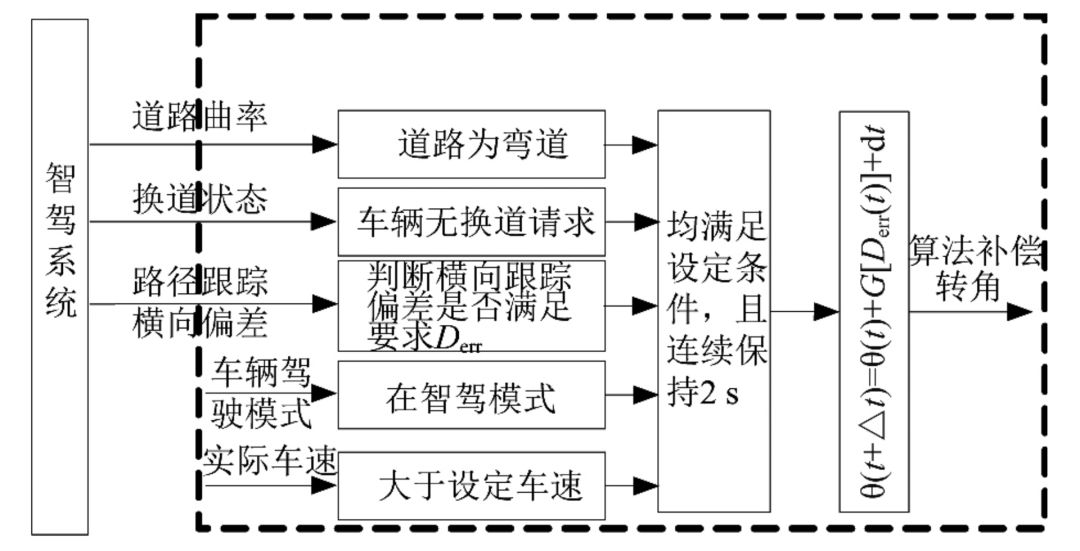
圖 4 彎道路徑跟蹤偏差轉角補償控制
直道路徑跟蹤補償主要解決方向盤偏差或者側向風等,同時考慮到為防止車輛轉向的超調,降低其響應速度。但在彎道上,若車速較高,車輛離心力較大,難以保持在車道內。為此,針對彎道上的橫向跟蹤誤差需要進行針對性處理,圖 4 提出根據道路的曲率半徑,判斷是否處于彎道以及車輛跟蹤的橫向誤差值過大,否則激活彎道的轉角補償控制,維持車輛在本車道內。經過實車試驗后,發現車輛高速行駛在彎道內依然能夠穩定地行駛在車道中心。
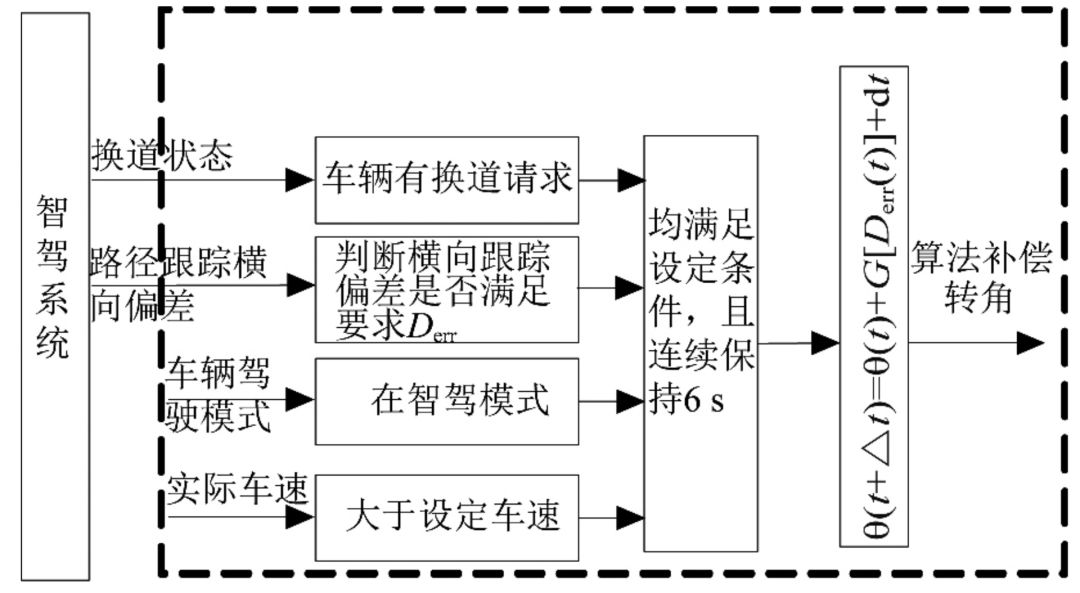
圖 5 換道路徑跟蹤偏差轉角補償控制
在實車試驗時發現,車輛在彎道高速行駛時,向內車道換道行駛,由于車輛離心力的作用,容易出現車輛行駛在兩車道之間,無法成功并入內車道。為此,圖 5 提出在識別出換道狀態后,且車輛始終無法完成換道,方向盤轉角進行主動補償,直至車輛完成換道。經過試驗驗證,該算法能夠實現在高速急彎道上,車輛安全地向內道換道成功。
2. 車輛控制性能評價
本文研究對象為某款汽車車型,通過改造底盤系統:電動助力主動轉向功能、發動機控制模塊的扭矩控制功能、穩定系統主動制動的控制功能、車身穩定控制系統、網關等,選擇測試場地為高環試車場,車輛測試場景為直道車道保持、彎道車道保持、換道等。
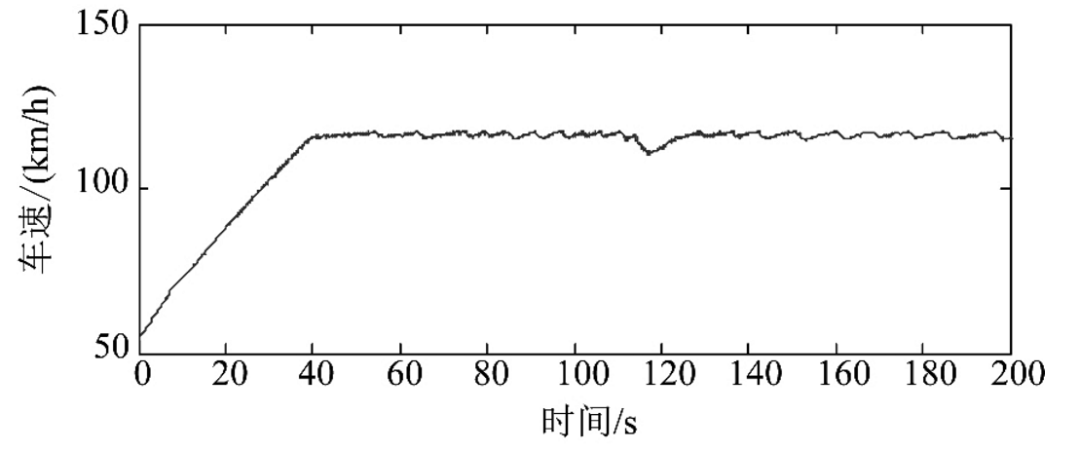
圖 6 車速
圖 6 為車速曲線圖,車輛在 55 km/h 加速至120 km /h,并維持在 120 km/h 約 180 s。
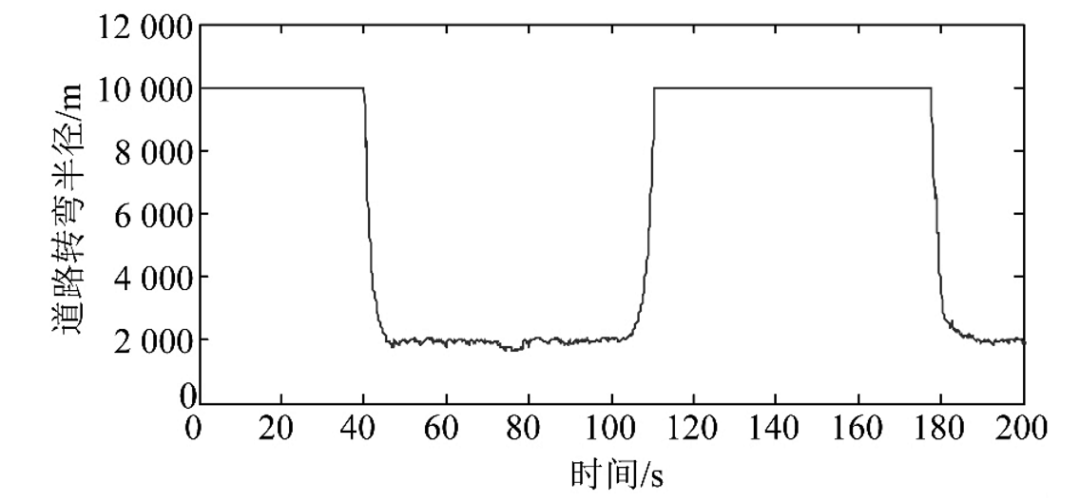
圖 7 車輛道路曲率半徑
根據道路曲率半徑,每隔 1 m 取一個點,每 3 個相鄰的坐標點即可計算出 1 個道路半徑值,如圖 7 所示。

圖 8 路徑跟蹤誤差
圖 8 為路徑跟蹤誤差,其最大值小于 20 cm,平均誤差在 10 cm 以內,當車輛誤差較大時,轉角補償控制、橫向誤差也能快速地收斂,讓車輛維持在車道中心。

圖 9 方向盤實際與目標轉角
圖 9 為方向盤的實際轉角與期望轉角,期望轉角根據軌跡跟蹤控制計算,但根據圖 9 可知,方向盤的目標轉角與實際轉角貼合較好,轉角較平穩。

圖 10 目標軌跡 Y 方程的 4 個系數
圖 10 為目標軌跡 Y 方程的 4 個系數,因為擬合系數的坐標原點為后軸中心,為此,常數項 d2 為 0,一次項系數 c2 較小,二次項與三次項 b2、a2 較大。
3. 結語
智能駕駛車輛控制是動態環境下安全行駛的關鍵,本文提出一種前饋控制計算目標轉角,以及結合道路狀態的反饋路徑偏差閉環修正車輛閉環控制。
該方法使車輛在多種工況下均能緊跟目標路徑,解決了因車輛方向盤轉角誤差、外界側向風及彎道下車輛高速離心力等多種因素導致的車輛橫向偏差。
經過實車試驗驗證,該算法具有很強的魯棒性與擴展性,能夠實現復雜工況下的車輛穩定性能。
參考文獻
[1] 姜巖,趙熙俊,龔建偉,等. 簡單城市環境下地面無人駕駛系統的設計研究[J]. 機械工程學報,2012,48 (20):103-112
[2] 丁海濤,郭孔輝,李飛,等. 基于加速度反饋的任意道路和車速跟隨控制駕駛員模型[J]. 機械工程學報,2010,46(10):116-120
[3] 莊德軍,喻凡,林逸. 基于分數階 PD 控制器的車輛方向控制[J]. 上海交通大學學報,2007(2):278-283
[4] 孫銀健. 基于模型預測控制的無人駕駛車輛軌跡跟蹤控制算法研究[D]. 北京:北京理工大學,2015
[5] 楊建森,郭孔輝,丁海濤,等. 基于模型預測控制的汽車底盤集成控制[J]. 吉林大學學報(工學版),2011(2):1-5
[6] Guo Konghui,Ding Haitao,Zhang Jianwei,et al. Development of a longitudinal and lateral driver model for autonomous vehicle control [J]. International Journal of Vehicle Design,2004,36(1):50-65
[7] Falcone P,Borrelli F,Asgari J,et al. Predictive active steering control for autonomous vehicle systems [J] . Control Systems Technology on IEEE Transactions,2007,15(3):566-580
[8] Gao Zhenhai,Guanh sin,Guo Konghui. Driver directional control model and the application in the research of intelligent vehicle [J]. China Journal of Highway and Transport,2000,13(3)
-
智能駕駛
+關注
關注
5文章
3021瀏覽量
51329
原文標題:智能駕駛車輛橫向跟蹤控制與實車試驗
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
家用智能垃圾桶控制板方案設計原理以及設計中需要注意的事項
基于BL370邊緣控制器的水處理智能加藥系統解決方案
變頻器模擬給定及反饋信號干擾的解決辦法

污水處理廠濾池及加藥PLC數據采集解決方案
OBD診斷儀方案MCU微控制器應用
污水加藥設備遠程監控與遠程維護系統方案
8×8 LED點陣+鐳射,納祥科技可辨別轉向單車尾燈方案,適配多騎行場景
ADI TMC8100 通用編碼器總線控制器:高精度運動控制的位置反饋核心方案




 工商網監
工商網監
評論