 松下A6伺服通信協議介紹
松下A6伺服通信協議介紹

松下A6伺服通信協議是工業自動化領域中廣泛使用的一種高性能通信標準,其設計旨在實現伺服驅動器與控制器之間的高效數據交互。該協議基于松下自主開發的通信架構,支持多種通信方式,包括RS-485、CANopen以及EtherCAT等,能夠滿足不同工業場景下的實時控制需求。以下將從協議特點、通信模式、參數配置及典型應用等方面展開詳細說明。

一、協議核心特點
1. 實時性與高精度
松下A6協議采用優化的數據幀結構,最小通信周期可達250μs,適用于高速高精度的運動控制場景。其同步機制支持多軸協同操作,位置指令的傳輸延遲控制在毫秒級,確保機械臂、CNC機床等設備的動態響應性能。
2. 多通信接口兼容
●RS-485:支持半雙工通信,最大節點數32個,傳輸距離可達1200米,適用于分散式控制系統。
●CANopen:符合DS301/DS402標準,提供PDO(過程數據對象)和SDO(服務數據對象)兩種數據傳輸模式,便于實現設備間的即插即用。
●EtherCAT:通過分布式時鐘同步技術,實現納秒級時間同步,適用于多軸聯動的大型生產線。
3. 參數靈活配置
協議內置超過200個可調參數,涵蓋電機控制(如PID增益、慣性比)、通信設置(如波特率、節點ID)及安全功能(如扭矩限制、急停響應)。用戶可通過專用軟件Panaterm或第三方工具(如TIA Portal)進行在線修改。
二、通信數據幀解析
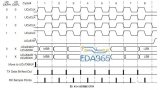
以RS-485為例,A6協議的數據幀包含以下字段:
●起始符:固定為“:”(0x3A),標識幀開始。
●地址域:1字節,范圍0x01~0x1F,對應驅動器節點地址。
●命令碼:2字節,例如0x0103表示讀取位置反饋值。
●數據域:長度可變,采用ASCII編碼,如“P1000”表示設定位置為1000脈沖。
●校驗和:1字節LRC校驗,確保傳輸可靠性。
●結束符:固定為“rn”(0x0D 0x0A)。
示例指令:
```
:01 0103 P1000 45rn
```
該指令表示向地址1的驅動器發送位置設定命令,目標值為1000脈沖,校驗和為0x45。
三、典型應用場景
1. 包裝機械
在高速貼標機中,通過EtherCAT總線同步控制多個A6伺服軸,實現標簽位置的毫米級定位。參數組“Pn202”(電子齒輪比)可動態調整以適應不同規格的包裝材料。
2. 機器人關節控制
六軸協作機器人采用CANopen通信,利用PDO實時傳輸關節角度指令,SDO用于在線修改力矩參數(如Pn406)。協議的抗干擾特性確保在焊接等高電磁干擾環境下穩定運行。
3. 半導體設備
晶圓搬運機械手依賴A6協議的高速響應特性,通過RS-485鏈式連接多個驅動器,結合“Pn500”系列的全閉環參數,實現±0.01mm的重復定位精度。
四、調試與故障處理
1. 常見通信問題
●節點無響應:檢查終端電阻(RS-485需120Ω匹配)、波特率(默認115200bps)及地址沖突。
●數據丟包:縮短通信距離或改用屏蔽雙絞線,必要時啟用協議的重發機制(Pn00C.1=1)。
2. 參數備份與恢復
使用Panaterm導出“.prm”參數文件,亦可直接讀寫驅動器的EEPROM(命令碼0x0201)。對于批量設備,可通過廣播指令統一配置。
五、發展趨勢
隨著工業4.0的推進,松下已推出支持OPC UA的A6N系列驅動器,在保留原有協議的基礎上增加云端數據接口。未來,A6協議或將進一步融合TSN(時間敏感網絡)技術,以滿足5G工廠的極低時延需求。
總之,松下A6伺服通信協議憑借其模塊化設計、開放性和穩定性,已成為自動化設備開發的重要工具。用戶需結合具體硬件選型和工藝要求,充分挖掘其功能潛力。
-
通信協議
+關注
關注
28文章
1093瀏覽量
42274 -
松下
+關注
關注
14文章
28110瀏覽量
97640 -
ethercat
+關注
關注
20文章
1527瀏覽量
45638
發布評論請先 登錄
松下A5伺服運行抖動怎么調整參數啊?

重型車輛J1939通信協議是什么
機器人通信協議EtherCAT和CAN如何選擇
協議“老將”,連接工業智能的橋梁——一文讀懂ModBus通信協議
通信協議IIC與SPI最全對比分析
Xilinx FPGA串行通信協議介紹
如何使用FPGA實現SRIO通信協議

分布式能源并網的通信協議有哪些?



有哪些方法可以確保硬件加速與通信協議的兼容性?
魏德米勒助力松下伺服驅動器革新突破
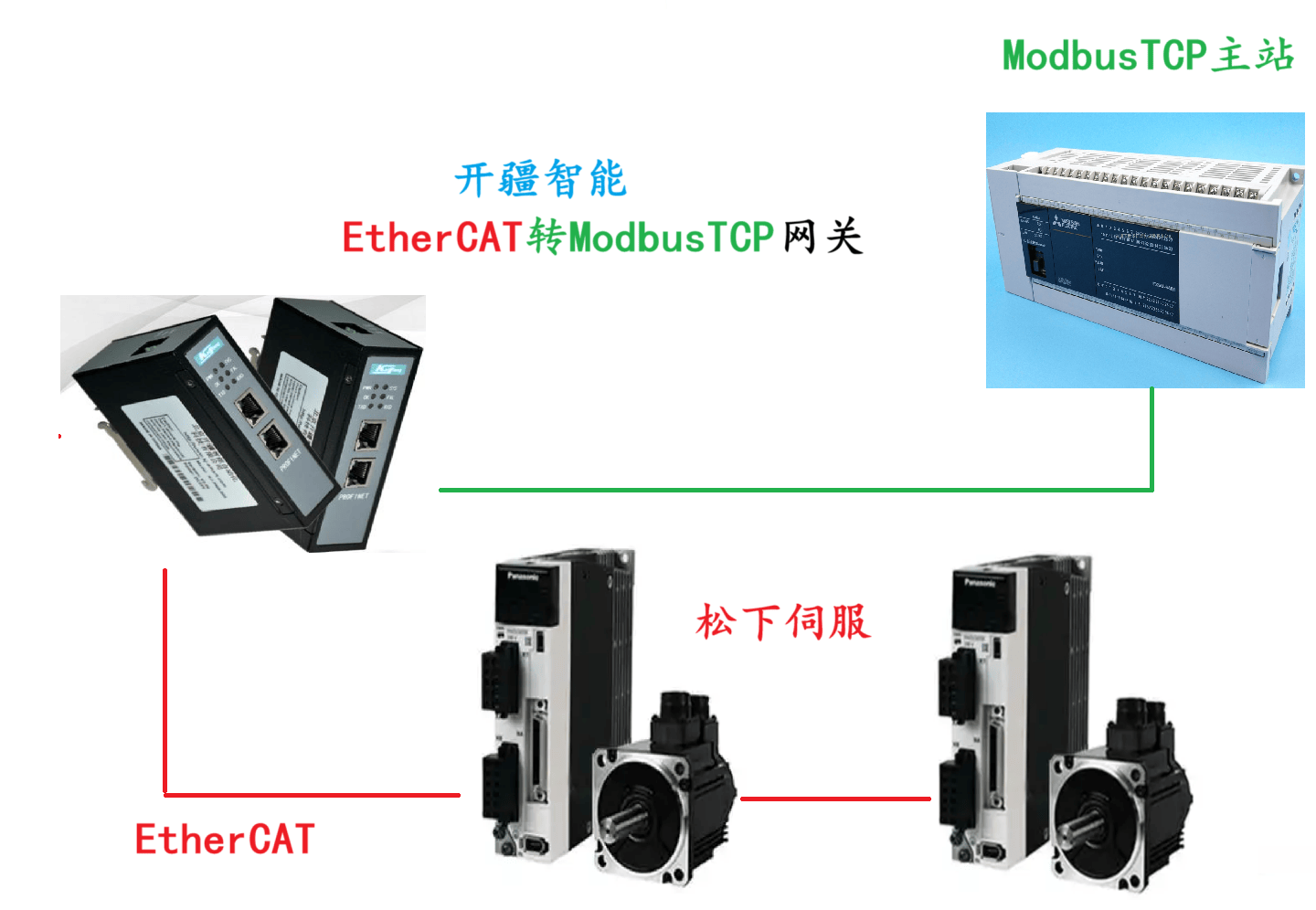
開疆智能ModbusTCP轉EtherCAT網關連接松下伺服案例
HIPERFACE DSL編碼器通信協議介紹




 工商網監
工商網監
評論