") 伺服電機(jī)與伺服驅(qū)動詳解
伺服電機(jī)與伺服驅(qū)動詳解

伺服電機(jī)與伺服驅(qū)動系統(tǒng)作為現(xiàn)代工業(yè)自動化的核心部件,其高精度、快速響應(yīng)和穩(wěn)定控制的特性使其在機(jī)器人、數(shù)控機(jī)床、精密儀器等領(lǐng)域發(fā)揮著不可替代的作用。本文將從工作原理、系統(tǒng)構(gòu)成、關(guān)鍵技術(shù)、應(yīng)用場景及發(fā)展趨勢五個維度展開詳細(xì)解析,幫助讀者全面理解這一技術(shù)體系的精髓。

一、伺服系統(tǒng)的基本工作原理
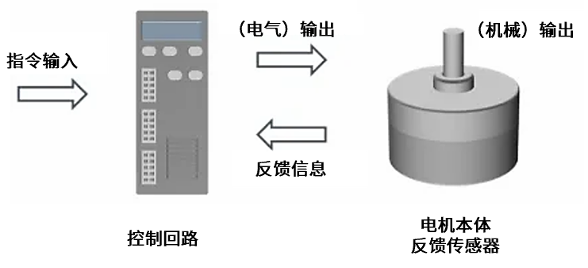
伺服電機(jī)本質(zhì)上是一種能夠?qū)崿F(xiàn)精確位置、速度或轉(zhuǎn)矩控制的電動機(jī)。其工作原理基于閉環(huán)控制理論:通過安裝在電機(jī)軸端的編碼器或旋轉(zhuǎn)變壓器實時反饋轉(zhuǎn)子位置信息,與控制器發(fā)出的指令信號進(jìn)行比較后,由驅(qū)動器計算出誤差值并調(diào)整輸出電流,最終使電機(jī)輸出與指令保持動態(tài)一致。這種閉環(huán)調(diào)節(jié)機(jī)制可將位置誤差控制在±1個脈沖以內(nèi),甚至達(dá)到亞微米級精度。
交流伺服電機(jī)采用永磁同步電機(jī)(PMSM)或感應(yīng)電機(jī)(IM)結(jié)構(gòu),其中永磁同步電機(jī)憑借高功率密度、低慣量等優(yōu)勢占據(jù)主流市場。其轉(zhuǎn)子采用釹鐵硼永磁體,定子繞組通入由驅(qū)動器生成的三相正弦波電流,通過控制電流頻率和相位實現(xiàn)精準(zhǔn)的磁場定向控制(FOC)。典型的3000rpm伺服電機(jī)轉(zhuǎn)速波動可控制在±0.1%以內(nèi),轉(zhuǎn)矩脈動小于額定值的2%。
二、伺服驅(qū)動系統(tǒng)的核心構(gòu)成
完整的伺服系統(tǒng)包含三大核心組件:
1. 伺服驅(qū)動器:作為系統(tǒng)的"大腦",采用32位DSP或ARM處理器實現(xiàn)高速運(yùn)算。現(xiàn)代驅(qū)動器集成多種控制模式(位置/速度/轉(zhuǎn)矩),支持EtherCAT、Profinet等工業(yè)總線協(xié)議。關(guān)鍵技術(shù)包括:
●空間矢量脈寬調(diào)制(SVPWM)技術(shù),提升電壓利用率15%以上。
●前饋補(bǔ)償算法降低跟蹤誤差。
2. 伺服電機(jī):按電源類型可分為交流(AC)和直流(DC)伺服電機(jī)。交流伺服電機(jī)采用全封閉結(jié)構(gòu),防護(hù)等級可達(dá)IP67,連續(xù)轉(zhuǎn)矩密度超過3.5Nm/kg。特殊設(shè)計的低齒槽轉(zhuǎn)矩轉(zhuǎn)子使低速平穩(wěn)性優(yōu)于0.1rpm。
3. 反饋裝置:23位絕對值編碼器成為行業(yè)新標(biāo)準(zhǔn),分辨率達(dá)到838萬脈沖/轉(zhuǎn)。某些高端型號采用雙編碼器配置(電機(jī)端+負(fù)載端),可實現(xiàn)全閉環(huán)控制。
三、關(guān)鍵技術(shù)突破點
現(xiàn)代伺服系統(tǒng)的發(fā)展主要圍繞以下技術(shù)展開:
●智能控制算法:模型預(yù)測控制(MPC)、自適應(yīng)模糊PID等先進(jìn)算法使響應(yīng)時間縮短至1ms以內(nèi)。
●集成化設(shè)計:驅(qū)動與電機(jī)一體化產(chǎn)品體積縮小40%,如安川Σ-7系列。
●振動抑制技術(shù):基于FFT分析的在線慣量辨識可自動抑制機(jī)械諧振。
●能效優(yōu)化:再生制動能量回收效率達(dá)85%,較傳統(tǒng)方案節(jié)能30%。
特別值得關(guān)注的是EtherCAT總線技術(shù)的普及,使伺服系統(tǒng)的同步精度達(dá)到納秒級,多軸協(xié)同控制時位置偏差不超過±1微米。某品牌六關(guān)節(jié)機(jī)器人采用該技術(shù)后,重復(fù)定位精度達(dá)到±0.02mm。
四、典型應(yīng)用場景分析
1. 工業(yè)機(jī)器人領(lǐng)域:六軸協(xié)作機(jī)器人要求伺服系統(tǒng)具備0.001°的角度控制精度,且需要實現(xiàn)重力補(bǔ)償、碰撞檢測等特殊功能。某型號SCARA機(jī)器人采用直接驅(qū)動伺服電機(jī)后,循環(huán)時間縮短至0.3秒。
2. 數(shù)控機(jī)床:五軸聯(lián)動加工中心對伺服系統(tǒng)提出苛刻要求:進(jìn)給軸定位精度0.005mm,主軸在6000rpm時徑向跳動≤0.002mm。采用直線電機(jī)+光柵尺全閉環(huán)方案可滿足需求。
3. 半導(dǎo)體設(shè)備:晶圓搬運(yùn)機(jī)械手需要納米級定位,特殊設(shè)計的真空伺服電機(jī)可在10^-6Pa環(huán)境下穩(wěn)定工作,配合氣浮導(dǎo)軌實現(xiàn)±5nm重復(fù)定位精度。
4. 新能源裝備:光伏串焊機(jī)采用直線伺服系統(tǒng),加速度達(dá)5G,每小時可完成3600次精確定位。
五、未來技術(shù)演進(jìn)方向
隨著工業(yè)4.0的深入發(fā)展,伺服系統(tǒng)正呈現(xiàn)以下發(fā)展趨勢:
1. 數(shù)字化與網(wǎng)絡(luò)化:TSN(時間敏感網(wǎng)絡(luò))技術(shù)將控制周期壓縮至100μs,5G無線伺服系統(tǒng)開始試點應(yīng)用。
2. AI深度集成:基于深度學(xué)習(xí)的參數(shù)自整定系統(tǒng)可自動識別負(fù)載特性,調(diào)試時間縮短90%。
3. 新材料應(yīng)用:碳纖維轉(zhuǎn)子使轉(zhuǎn)速突破30000rpm,高溫超導(dǎo)繞組有望提升功率密度50%。
4. 模塊化設(shè)計:可拆卸式功率模塊使驅(qū)動器維修時間從4小時降至15分鐘。
據(jù)行業(yè)預(yù)測,到2028年全球伺服系統(tǒng)市場規(guī)模將突破200億美元,其中協(xié)作機(jī)器人、醫(yī)療設(shè)備等新興領(lǐng)域?qū)⒈3?8%以上的年復(fù)合增長率。國產(chǎn)伺服品牌通過突破核心算法和關(guān)鍵器件(如IGBT、編碼器芯片),市場份額已從2015年的15%提升至目前的35%。
需要特別指出的是,伺服系統(tǒng)的選型需綜合考慮剛性匹配、慣量比(建議控制在3-5倍)、過載能力等參數(shù)。實際應(yīng)用中,約60%的故障源于機(jī)械安裝問題(如同軸度偏差),因此專業(yè)調(diào)試至關(guān)重要。隨著數(shù)字孿生技術(shù)的普及,虛擬調(diào)試正在成為降低現(xiàn)場調(diào)試風(fēng)險的有效手段。
審核編輯 黃宇
-
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2185瀏覽量
61290 -
伺服驅(qū)動
+關(guān)注
關(guān)注
4文章
101瀏覽量
18303
發(fā)布評論請先 登錄
伺服電機(jī)和伺服減速機(jī)如何配選的
伺服電機(jī)增益詳解
伺服電機(jī)的控制方式簡述

派克Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

舵機(jī)與伺服電機(jī)的區(qū)別是什么?
伺服電機(jī)的三種制動方式有什么區(qū)別?

人形機(jī)器人伺服電機(jī)驅(qū)動器新動力:高性能電容器的協(xié)同作用

伺服電機(jī)中的回原點方式

伺服電機(jī)的工作原理、構(gòu)成以及應(yīng)用
什么是伺服電機(jī)編碼器?作用/關(guān)鍵技術(shù)/選型等一起看看吧!

伺服電機(jī)測試流程分析
安川伺服電機(jī)選型指南:直流or交流?詳解電機(jī)類型與特點

EtherCAT科普系列(3): EtherCAT技術(shù)在伺服驅(qū)動器領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論