 具身智能大小腦融合熱潮來襲!英特爾、瑞芯微和地瓜機器人三大廠商硬核出招
具身智能大小腦融合熱潮來襲!英特爾、瑞芯微和地瓜機器人三大廠商硬核出招


圖1:多維觸覺人形機器人TORA 電子發燒友拍攝
9月3日,2025世界人形機器人運動會"百米飛人"決賽在京舉行,宇樹H1與天工Ultra展開巔峰對決,最后天工機器人Ultra憑借"全自主決策+0.8成績系數"的21.5秒奪冠而告終。“天工 Ultra”高光時刻的背后,是其出色的軟硬件協同技術,以及“慧思開物”平臺所提供的具身智能大小腦支持。
今年以來,智元、宇樹、優必選都先后簽下人形機器人大單,人形機器人的大小腦芯片方案有哪些進展?主要的供應商和方案如何?本文進行詳細分析。
人形機器人大小腦主流路線一、分離方案,有優勢但兩大短板很明顯
國內人形機器人“大小腦”產業鏈的構建是推動其智能化與運動控制能力的關鍵環節。根據工信部《人形機器人創新發展指導意見》及各地政策規劃,“大腦”負責感知、決策與交互,“小腦”則專注于運動控制與協調,二者共同構成人形機器人的核心智能系統。
目前人形機器人主流的“大小腦方案”主要分為 “雙系統架構”與“融合架構”兩大路線,分別對應不同的技術路徑與供應商生態。第一種“雙系統架構”路線,大腦SoC負責高層決策、視覺識別、語言理解等,基于GPU+AI加速器,運行大模型(VLA模型),小腦負責實時控制、軌跡規劃、力控等,通常基于X86 CPU或實時控制器。
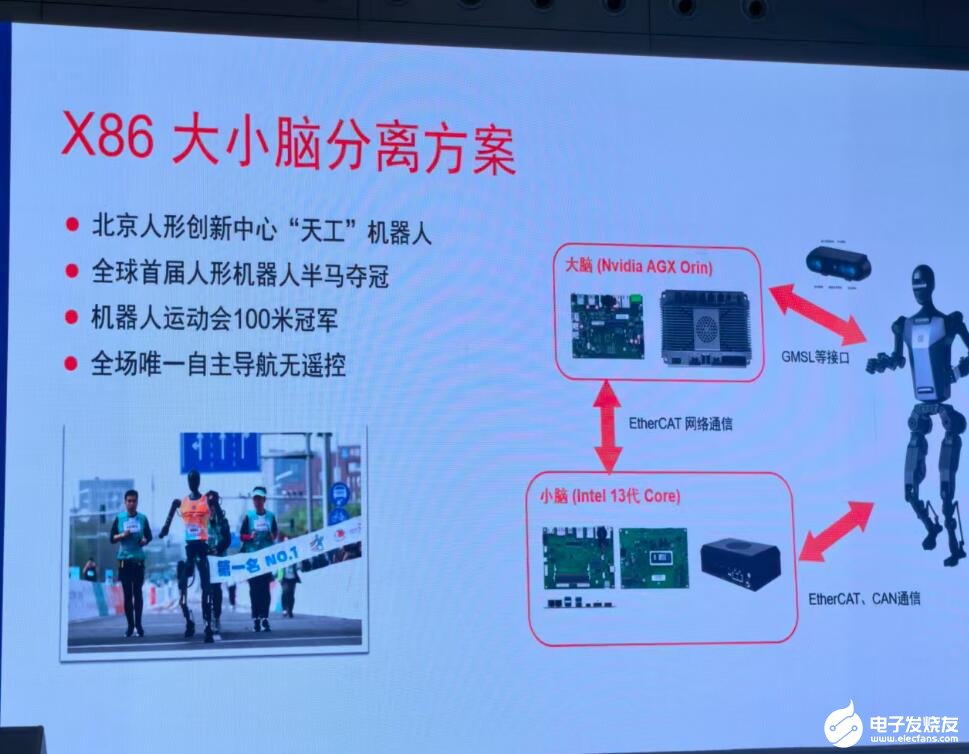
圖1:大小腦分立方案 電子發燒友拍攝
具身智能的主流計算架構是由大腦加小腦雙系統方案組成,大腦部分常用的是業界主流的GPU,而小腦部分則是以英特爾的x86 CPU為主,兩者通過網絡通信來協同工作。
在近期舉辦的2025智能機器人場景應用發展論壇上,這種“雙系統架構”雖然能滿足性能需求,但也帶來很多問題。信步科技總監陳偉秋表示,天工機器人的大腦配備英偉達AGX Orin,小腦采用英特爾 13代酷睿芯片,這種雙系統架構的瓶頸在哪里?
一是算力傳輸的延遲瓶頸,復雜場景需要實時的決策。大家刷視頻看到各種機器人在跳舞、表演和拳擊比賽,大多數都是剪輯的視頻,在北京世界人形機器人大會上,機器人的表演和視頻上有很大差異,現場看到機器人跌倒了,或者動作不協調,為何機器人有大算力芯片卻表現不好?機器人識別到、察覺到環境不同但是不能做出快速反應,傳輸延遲是重要的原因;二、大小腦方案,存在成本高、功耗大,體積難控制。這種分立方案,陳偉秋表示不能完全去匹配具身人形機器人在狹窄空間對體積要求的一個狀態。
英特爾、瑞芯微和地瓜機器人推出大小腦融合方案
2025年4月,英格爾正式發布了具身智能大小腦融合方案(下稱具身智能方案)。該方案基于英特爾酷睿? Ultra處理器的強大算力,以及全新的具身智能軟件開發套件和AI加速框架打造。
據悉,英特爾的酷睿Ultra系列將CPU、GPU、NPU封裝在一顆SoC中,不僅有x86 CPU的實時控制能力,還提供了出色的AI算力,兩者通過共享內存來通信,延遲大大降低。英特爾中國邊緣計算事業部行業解決方案高級總監李巖表示,傳統方案中,大腦和小腦分屬不同芯片或系統,通信和協作過程中容易產生系統級延遲,一些機器人甚至會因為這種延遲而摔跤,大小腦融合的方案有助于避免此類問題。
單系統架構不僅能有效降低整體成本,還能基于從28W到65W的多個SKU優化功耗與續航。此外,酷睿Ultra支持更緊湊的尺寸和靈活的接口設計,為ODM廠商打造小型、高效的具身智能設備提供了很大便利。
本次英特爾發布的具身智能方案以大小腦融合為亮點,能夠使感知、交互、任務規劃和運動控制在統一的系統中實現高效整合。而作為其中的算力中樞,英特爾酷睿? Ultra處理器通過CPU 、集成的英特爾銳炫? GPU 與 NPU 協同運行,以高性能異構算力和高精度實時性能,支持具身智能的多樣化負載穩定運行,同時也大幅提升具身智能系統的整體效率和響應能力。
信步科技總監陳偉秋表示,人形機器人大小腦融合方案有三大優勢:緊湊、靈活而且性能強大。可以進行模塊化設計,目前信步科技第一代產品采用英特爾的第二代酷睿ULtra產品,除了提供極強CPU的計算能力之外,它還能提供90TOPS的算力。第二GPU,也就是傳統小腦部分,集成了英特爾B570顯卡,最大能夠提供203TOPS算力,通過這種方式把大腦和小腦結合起來,降低了延遲,還有GMSL模塊,采用與車載的無人駕駛同樣的采集接口和通訊信號,有效的提高傳輸的實時性。一個工控盒子可以解決原來兩個盒子的功能,放在具身人形的體積里面,非常有優勢。
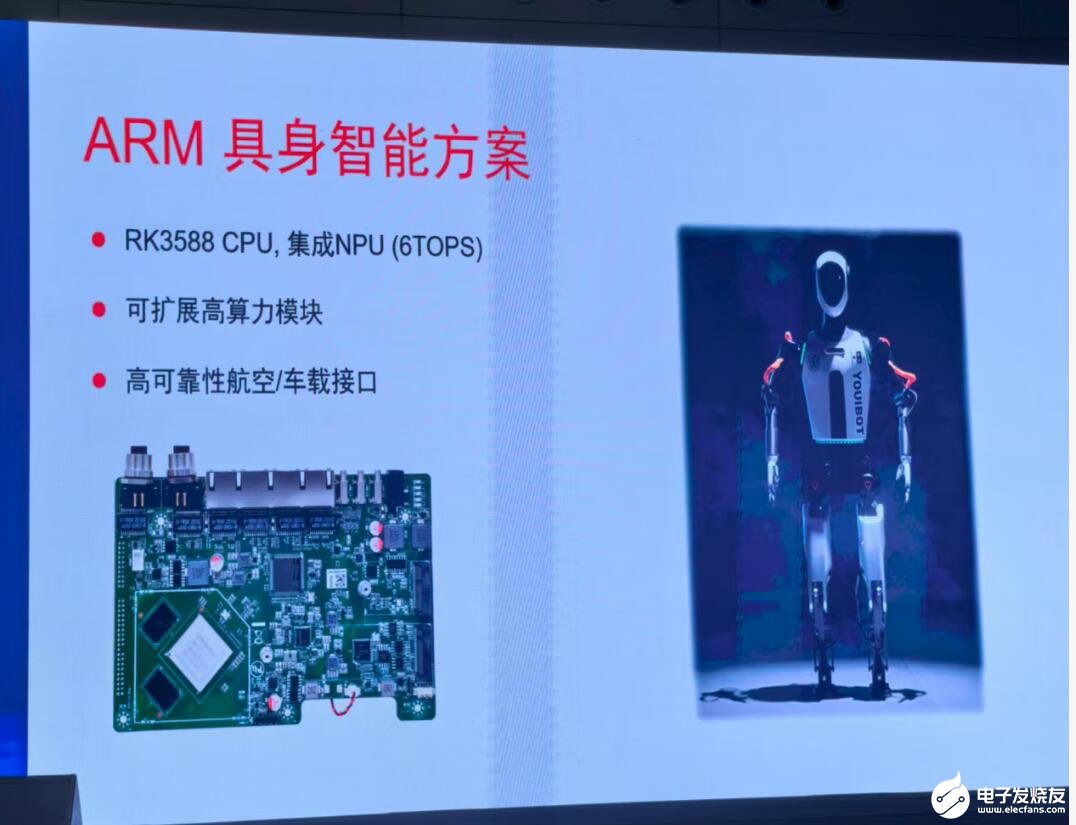
圖:RK3588 人形機器人智能方案 電子發燒友拍攝
我們看到基于ARM架構,瑞芯微推出旗艦產品 RK3588, 具備 8K視覺處理 + 6TOPS NPU算力,支持多傳感器融合(RGBD攝像頭、激光雷達、力覺傳感器),滿足人形機器人環境感知需求。優必選Walker X:采用瑞芯微SoC實現動態運動規劃。瑞芯微近日在互動平臺披露,其芯片方案已應用于宇樹科技的人形機器人、四足機器狗等產品,標志著國產芯片在機器人領域的應用邁出重要一步。
6月11日,地平線旗下的地瓜機器人推出了首款SoC 算控一體化機器人開發套件RDK S100。RDK S100 的 “大腦” 十分強勁。它采用 6 核心 Arm Cortex - A78AE CPU,可提供 100K DMIPS 高效算力,還支持實時內核,具備高效調度和低延遲特性。基于 Nash 架構、擁有 80 TOPS 算力的 BPU,支持 160 + ONNX 標準算子,專為 CNN 和 Transformer 優化,不僅推理速度快,而且功耗低,能夠滿足各類復雜決策和規劃任務的計算需求。得益于 “類人” 的大小腦協同異構架構設計,RDK S100 能夠支持大小模型的動態融合、無縫切換。

其 “小腦” 同樣高性能。由 4 核心 Arm Cortex - R52 + MCU 組成,具備 6K + DMIPS 算力,為機器人提供了高幀率、低延遲的關節實時控制能力,能滿足各種實時運控場景的計算需求,確保機器人在運動過程中的精準性和穩定性。
基于 RDK S100,地瓜機器人已與超過 20 家具有行業影響力的具身智能頭部客戶建立合作,覆蓋人形機器人、半人形/機械臂、四足機器狗、智能化方案等多個領域,且獲超過50 家客戶開展測評。
本文由電子發燒友原創,轉載請注明以上來源。微信號zy1052625525。需入群交流,請添加微信elecfans999,投稿爆料采訪需求,請發郵箱zhangying@huaqiu.com。
-
英特爾
+關注
關注
61文章
10310瀏覽量
180884 -
瑞芯微
+關注
關注
27文章
814瀏覽量
54578 -
英偉達
+關注
關注
23文章
4109瀏覽量
99513 -
人形機器人
+關注
關注
7文章
1013瀏覽量
18525 -
地瓜機器人
+關注
關注
1文章
32瀏覽量
417
發布評論請先 登錄
【具身智能】基于AGX Orin+RK3588的大小腦協同機器人解決方案

逐際動力發布LimX COSA:具身智能邁入“大小腦協同”新紀元
英特爾攜手產學合作伙伴發布《具身智能機器人安全子系統白皮書》

阿普奇KiWiBot系列“大小腦”控制器:打造具身智能機器人的“核心引擎”

打造機器人母生態!一年開發者數量翻倍,地瓜機器人發布具身智能大算力開發平臺

具身智能大算力開發平臺S600重磅亮相,地瓜機器人引領端云一體機器人進化新范式

英特爾舉辦行業解決方案大會,共同打造機器人“芯”動脈


《人民日報》報道!中科億海微“中國芯”賦能具身智能機器人

80 TOPS 算力、大小腦超級異構!地瓜機器人發布 RDK S100 算控一體化機器人開發套件

RDK全系賦能!點貓科技與地瓜機器人共建具身智能大中小貫通培養閉環要聞

樂聚機器人與地瓜機器人達成戰略合作,聯合發布Aelos Embodied具身智能

融合計算突破界限,英特爾大小腦融合架構加速具身智能進化




 工商網監
工商網監
評論