 Apollo 2.5推出了基于動態的實時相對地圖的解決方案
Apollo 2.5推出了基于動態的實時相對地圖的解決方案

高精地圖對于開發者及測試者來說并不是可以輕易獲得的,制作高精地圖需要大量的成本,周轉時間長,在此背景下Apollo 2.5推出了基于動態的實時相對地圖(Real-time Relative Map )的解決方案。
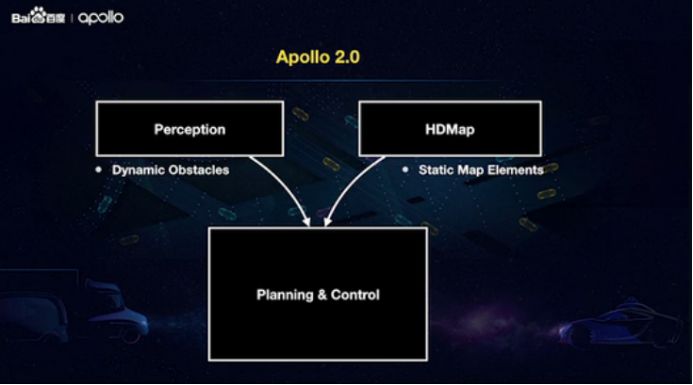
在Apollo 1.5和2.0中,規劃模塊和控制模塊依靠的是全球定位和高精地圖。高精地圖中有豐富的地圖元素,可以幫助車輛規劃,實現復雜路況下的自動駕駛,眾所周知,高精地圖在自動駕駛中的價值所在,它們不僅有著較高的精準度,而且適用于任何路況,更重要的是高精地圖對于路測有著重要意義,但高精地圖對于開發者及測試者來說并不是可以輕易獲得的,制作高精地圖需要大量的成本,周轉時間長,在此背景下Apollo 2.5推出了基于動態的實時相對地圖(Real-time Relative Map )的解決方案。
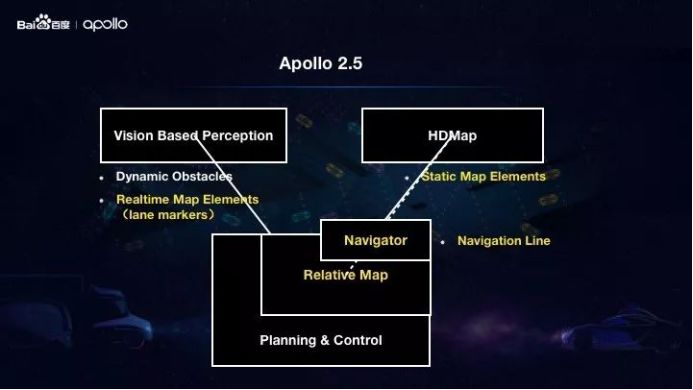
該地圖基于車輛坐標系,其原點位于車輛本身。眾所周知,車道線是地圖中的重要元素,以確保自動駕駛車輛做出合理的決策并進行安全的軌跡規劃。在相對地圖中,車道線數據是通過基于攝像頭的車道感知而生成的,并且包含基于云端的導航線(Navigation Line)。
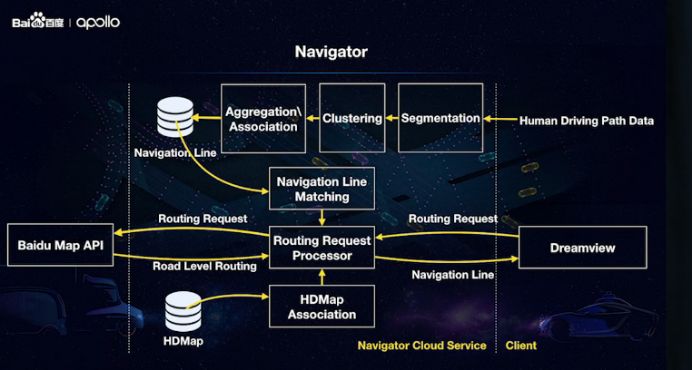
下圖闡釋了導航線是如何生成的。
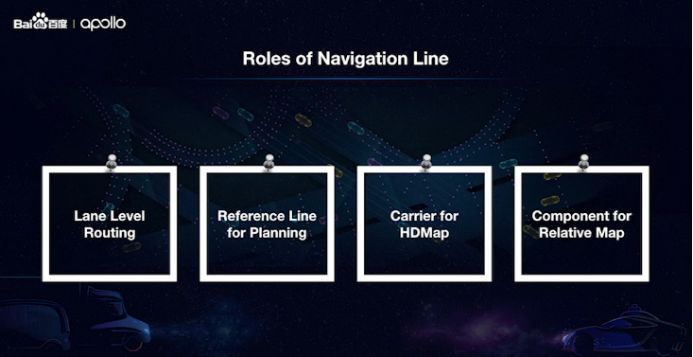
導航線在自動駕駛中扮演著多種角色。第一,導航線作為出發點與目的地點的連接線,提供車道級別導航;第二,導航線可以生成Referenceline用于駕駛決策;第三,為高精地圖提供載體;第四,導航線是相對地圖的重要組成部分。
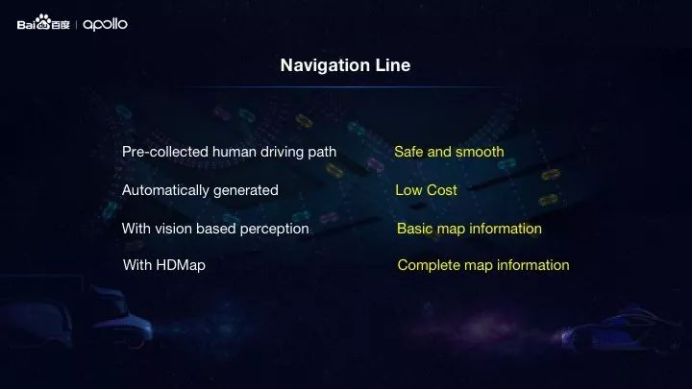
導航線有以下特點:
1.導航線是按照駕駛員駕駛路徑設計,所以安全性和舒適性是有保障的;
2.更重要的是,基于駕駛數據,導航線可以自動生成,大大降低了開發成本;
3.可以與視覺感知系統配合生成基本的地圖信息,可以適用于比較簡單的駕駛場景,比如高速公路、鄉村道路等;
4.導航線可以與高精地圖結合,生成復雜的駕駛場景,例如城市道路。
下面我們舉例說明,相對地圖和導航線在自動駕駛場景中是如何工作的。
1.在如下圖highlight區域部署自動駕駛場景;
2.在實現真正的自動駕駛之前,我們需要采集導航線,經過對駕駛員駕駛路徑的采集,后期可以轉換成為(如下圖綠色線條);
3.需求:實現從A→B的自動行駛;
4.按照傳統地圖(百度地圖or谷歌地圖)導航,生成的軌跡1(藍色線條);
5.在接到導航需求時,系統會選擇一條最匹配的導航線(黃色標線)用來導航;
6.系統為決策模塊提供多條導航線,可以實現變道功能。
通過使用這種方法,我們可以創建一個與高精地圖的數據格式相匹配的相對地圖(Relative Map),并基于事先錄制好的人工駕駛軌跡和攝像頭實時檢測到的車道線。有的開發者會有疑問:相對地圖與SLAM有什么區別呢?其實SLAM問題可以描述為: 汽車在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現汽車的自主定位和導航。Relative Map在基于指引線錄制模式時,會依賴錄制的指引線與實時攝像頭信息生成Relative Map,同時,依靠GPS定位; 在基于純攝像頭模式時,并不進行自身定位和建造增量式地圖,只依賴實時攝像頭生成的車道線信息行駛。
在行駛過程中,相對地圖數據的計算和更新頻率10Hz,相對地圖數據來源一是基于視覺感知的車道標識,二是基于云端的導航線,而且相對地圖支持以下三種自動駕駛場景:
相對地圖模式1,僅依靠視覺感知的車道標識
適用場景:
1、定位缺失;
2、只有來自感知系統的車道線識別;
3、車道保持與自適應巡航。
在基于指引線錄制模式時,會依賴錄制的指引線與實時攝像頭信息生成的Relative Map行駛,此時需要GPS定位。當GPS失效時(比如通過某個隧道),系統將自動切換為基于純攝像頭模式,此時只依賴實時攝像頭生成的車道線信息行駛。只要有車線可以辨別,車會沿著車道中心線一直開(Lane Keeping)。如果車道線不可辨別,需要人來接管。
相對地圖模式2,依靠視覺感知與云端導航線
適用場景:
1、感知系統檢測的車道標識
2、能從云端獲取導航線
3、高速道路或者車道線不清晰的鄉村道路
此條件下,導航線與感知系統結合生成地圖數據,用于車輛決策。
相對地圖模式3,依靠視覺感知、云端導航線以及高精地圖
適用場景:
1、車道標識不是來自于感知系統檢測,而是基于歷史駕駛數據以及高精地圖生成;
2、能從云端獲取導航線
3、城市道路
此條件下,導航線結合高精地圖,能實現城市道路的規劃決策。
相較來講,相對地圖的精度較低,僅限于某些用途。但它卻有著不容忽視的優勢,成本更低,周轉更快 ,并且制作起來更容易,還可以實現實時更新。
-
攝像頭
+關注
關注
61文章
5108瀏覽量
103420 -
自動駕駛
+關注
關注
794文章
14952瀏覽量
181095 -
Apollo
+關注
關注
5文章
351瀏覽量
19749
原文標題:Apollo 2.5實時相對地圖
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
百度地圖LD解決方案助力無人配送行業規模化落地
TPS84250:7 - 50V輸入、2.5A降壓集成電源解決方案
直流固態變壓器控制策略仿真解決方案
基于BL350與IGH?EtherCAT的硬實時控制解決方案
從高精地圖到輕地圖,再到“無圖”,誰才是真需求?

金升陽推出HO1-P(N)2501-2.5F系列高壓輸出電源

材料電壓-電流動態特性測試解決方案
實時生成式地圖對于自動駕駛來說有什么作用?

一種適用于動態環境的實時RGB-D SLAM系統




 工商網監
工商網監
評論