") 清華大學(xué)尤政院士團(tuán)隊(duì)提出激光雷達(dá)新技術(shù),突破瓶頸
清華大學(xué)尤政院士團(tuán)隊(duì)提出激光雷達(dá)新技術(shù),突破瓶頸

編 者 按
近日,清華大學(xué)精密儀器系尤政院士課題組提出了一種基于混合級(jí)聯(lián)平動(dòng)超表面的雙模式激光雷達(dá)系統(tǒng)。該系統(tǒng)利用幾何相位與傳播相位超表面級(jí)聯(lián)調(diào)控,通過(guò)調(diào)制光的偏振狀態(tài),在高精度波束掃描模式與高效閃光照明模式之間靈活切換,適應(yīng)不同場(chǎng)景下的三維感知需求。結(jié)合自適應(yīng)三維探測(cè)能方案,可動(dòng)態(tài)調(diào)整探測(cè)模式與分辨率,成功彌合了傳統(tǒng)單一掃描式與閃光式激光雷達(dá)的技術(shù)局限,為高效、緊湊且具備更強(qiáng)環(huán)境適應(yīng)性的三維感知提供了新途徑。相關(guān)研究成果以“A dual-mode LiDAR system enabled by mechanically tunable hybrid cascaded metasurfaces”為題,發(fā)表在期刊《Light: Science & Applications》上。
研究背景與成果
在主動(dòng)三維成像技術(shù)中,激光雷達(dá)因其具備直接測(cè)距、高空間分辨率和強(qiáng)環(huán)境適應(yīng)性的優(yōu)勢(shì),已廣泛應(yīng)用于自動(dòng)駕駛、機(jī)器人感知和高精度測(cè)繪等領(lǐng)域。根據(jù)光束覆蓋方式的不同,現(xiàn)有激光雷達(dá)系統(tǒng)主要分為掃描式和閃光式兩類。掃描式激光雷達(dá)主要借助機(jī)械部件逐點(diǎn)掃描目標(biāo),具有精度高、探測(cè)距離遠(yuǎn)的特點(diǎn),但探測(cè)速率受限;閃光式激光雷達(dá)則采用一次性照明的探測(cè)方式,具備高探測(cè)效率的優(yōu)勢(shì),但在成像精度和探測(cè)距離上存在不足。如何實(shí)現(xiàn)兼顧高精度、遠(yuǎn)距離和高效率等指標(biāo)需求的激光雷達(dá),促使研究者不斷探索新型光束調(diào)控方法。近年來(lái),隨著納米光子學(xué)的發(fā)展,超表面技術(shù)因具備高精度、多通道光束調(diào)控能力和輕薄易于集成的特性,為激光雷達(dá)系統(tǒng)的多功能化、小型化提供了全新解決方案。
成果優(yōu)勢(shì)
為突破現(xiàn)有技術(shù)瓶頸,清華大學(xué)精密儀器系尤政院士課題組研發(fā)出一種雙模式光束調(diào)控器件,將可調(diào)諧混合級(jí)聯(lián)超表面與形狀記憶合金微致動(dòng)器相結(jié)合,融合了點(diǎn)陣掃描與閃光成像的優(yōu)勢(shì),可根據(jù)探測(cè)需求在高分辨率點(diǎn)陣掃描模式與單次均勻照明模式之間靈活切換。相比現(xiàn)有方案,該技術(shù)能有效兼顧探測(cè)分辨率、視場(chǎng)范圍與探測(cè)效率等關(guān)鍵指標(biāo),能夠滿足復(fù)雜環(huán)境下的高精度三維探測(cè)與快速全局感知需求,為新一代激光雷達(dá)系統(tǒng)、自主導(dǎo)航以及先進(jìn)三維成像技術(shù)的發(fā)展提供了新思路。
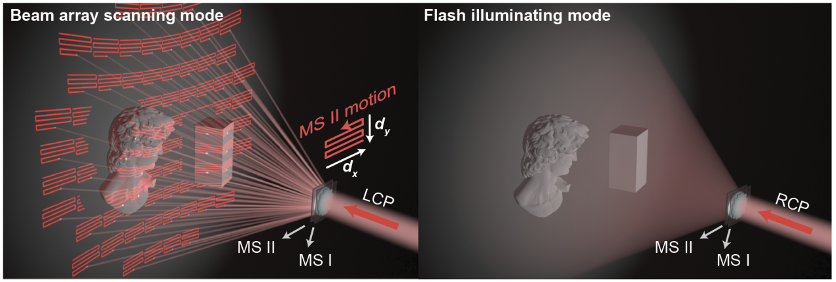
圖1.基于混合級(jí)聯(lián)平動(dòng)超表面實(shí)現(xiàn)的雙模式三維探測(cè)原理圖
通過(guò)控制入射光的偏振態(tài),即可實(shí)現(xiàn)兩種光束覆蓋模式間的靈活切換:左旋圓偏振光對(duì)應(yīng)點(diǎn)陣掃描模式,級(jí)聯(lián)超表面間±100 μm微小相對(duì)面內(nèi)平移可實(shí)現(xiàn)±35°二維視場(chǎng)的高準(zhǔn)直點(diǎn)陣光束掃描,改變位移步長(zhǎng)可動(dòng)態(tài)調(diào)整分辨率,適用于高精度、遠(yuǎn)距離的三維掃描任務(wù);右旋圓偏振光對(duì)應(yīng)閃光模式,通過(guò)一次性照亮整個(gè)視場(chǎng),可實(shí)現(xiàn)瞬時(shí)三維成像。
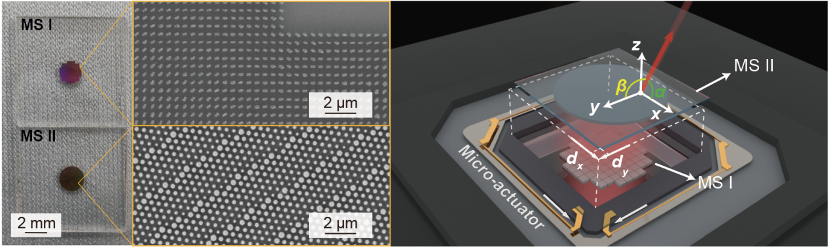
圖2.基于集成級(jí)聯(lián)超表面-致動(dòng)器平臺(tái)的光束調(diào)控器件
混合級(jí)聯(lián)超表面作為器件的核心,第一層為偏振敏感的幾何相位超表面并采用陣列化設(shè)計(jì),第二層為非偏振敏感的傳輸相位超表面。級(jí)聯(lián)超表面針對(duì)1064 nm波長(zhǎng)設(shè)計(jì),分別采用標(biāo)準(zhǔn)微納加工工藝制備,包括等離子增強(qiáng)化學(xué)氣相沉積(PECVD)、電子束曝光(EBL)與感應(yīng)耦合等離子體刻蝕(ICP)等步驟加工。光束調(diào)控器件集成形狀記憶合金微致動(dòng)器實(shí)現(xiàn)兩層超表面之間的高精度面內(nèi)位移驅(qū)動(dòng),具備微型化、響應(yīng)快和易集成等優(yōu)勢(shì)。
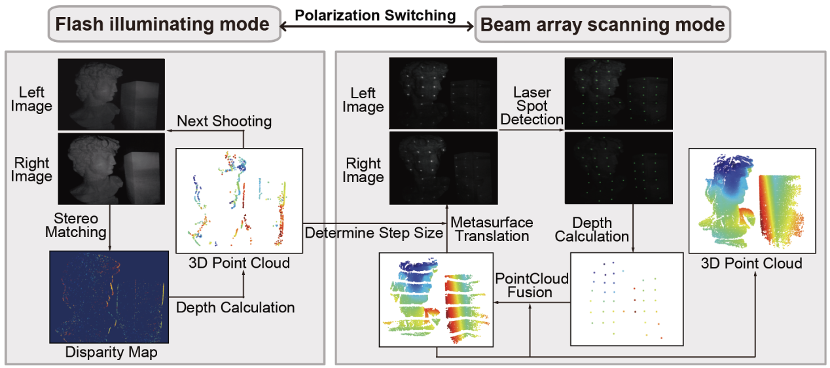
圖3.基于雙模式激光雷達(dá)系統(tǒng)的三維探測(cè)流程示意圖
此外,研究團(tuán)隊(duì)基于光束調(diào)控器件構(gòu)建了一套雙模式激光雷達(dá)系統(tǒng)與自適應(yīng)三維重建方案。系統(tǒng)首先工作在閃光模式下,快速完成整場(chǎng)景的快照式三維探測(cè),獲取目標(biāo)邊界形貌與復(fù)雜度信息。該初步數(shù)據(jù)為后續(xù)掃描模式中的步進(jìn)策略提供依據(jù),使系統(tǒng)能夠根據(jù)實(shí)際目標(biāo)特征智能選擇掃描分辨率。在波束掃描階段,系統(tǒng)可靈活執(zhí)行粗略或精細(xì)的定向掃描任務(wù),兼顧整體效率與局部細(xì)節(jié)。該系統(tǒng)通過(guò)偏振態(tài)驅(qū)動(dòng)實(shí)現(xiàn)兩種模式間的靈活切換,在保證全局快速探測(cè)的同時(shí)精確捕捉目標(biāo)關(guān)鍵特征,突破了傳統(tǒng)單一激光雷達(dá)在效率與精度之間互相矛盾的性能瓶頸。
總結(jié)與展望
基于混合級(jí)聯(lián)超表面多通道、高自由度光束整形能力,雙模式激光雷達(dá)系統(tǒng)在融合掃描式激光雷達(dá)高精度與flash激光雷達(dá)高效率優(yōu)勢(shì)時(shí),顯著提升了在復(fù)雜環(huán)境與多樣探測(cè)任務(wù)下的適應(yīng)性與靈活性。此外,借助超表面器件的超薄、超輕與可集成優(yōu)勢(shì),課題組研發(fā)出一套輕量化、精度可調(diào)的光束調(diào)控平臺(tái),可與飛行時(shí)間法、雙目視覺(jué)等多種三維成像機(jī)制兼容,具備良好的系統(tǒng)集成與功能擴(kuò)展能力。課題組表示,該工作不僅構(gòu)建了可適配多任務(wù)需求的高性能三維感知平臺(tái),也為推動(dòng)激光雷達(dá)系統(tǒng)的小型化、智能化與多模式探測(cè)發(fā)展提供了新思路。
本研究由清華大學(xué)精密儀器系、精密測(cè)試技術(shù)與儀器國(guó)家重點(diǎn)實(shí)驗(yàn)室、北京市集成電路高精尖創(chuàng)新中心、北京信息科技大學(xué)智能微系統(tǒng)實(shí)驗(yàn)室,以及華中科技大學(xué)智能制造裝備與技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室共同完成。清華大學(xué)精密儀器系2019級(jí)博士研究生張凌云和2022級(jí)博士研究生張馳為共同第一作者。清華大學(xué)邢飛教授、趙曉光副教授與北京信息科技大學(xué)景曉麗教授為共同通訊作者。本工作得到了國(guó)家自然科學(xué)基金、國(guó)家重點(diǎn)研發(fā)計(jì)劃、北京市杰出青年科學(xué)基金的資助。
論文鏈接:
https://doi.org/10.1038/s41377-025-01999-4
-
清華大學(xué)
+關(guān)注
關(guān)注
2文章
72瀏覽量
18399 -
激光雷達(dá)
+關(guān)注
關(guān)注
981文章
4491瀏覽量
196671 -
雙目視覺(jué)
+關(guān)注
關(guān)注
2文章
38瀏覽量
14529 -
三維成像
+關(guān)注
關(guān)注
0文章
41瀏覽量
11576
發(fā)布評(píng)論請(qǐng)先 登錄
從原理到量產(chǎn):FMCW激光雷達(dá)的核心技術(shù)體系與突破方向

清華大學(xué)“啟·創(chuàng)”計(jì)劃走進(jìn)拓維信息,校企共探AI時(shí)代產(chǎn)學(xué)研合作新范式

沐曦與Arm、熠知一同到訪清華大學(xué)交流座談
時(shí)識(shí)科技DAVIS346傳感器助力清華大學(xué)突破LIBS技術(shù)瓶頸
激光雷達(dá)為什么會(huì)出現(xiàn)串?dāng)_的問(wèn)題?

激光雷達(dá)創(chuàng)新思路:機(jī)械掃描+Flash合二為一


清華大學(xué)TOP EE+項(xiàng)目參訪美光上海
福特:激光雷達(dá)是極其重要的
從清華大學(xué)到鎵未來(lái)科技,張大江先生在半導(dǎo)體功率器件十八年的堅(jiān)守!
工信部新成立標(biāo)準(zhǔn)委員會(huì)!傳感器專家尤政院士任主任委員(附委員全名單)

清華大學(xué)攜手華為打造業(yè)內(nèi)首個(gè)園區(qū)網(wǎng)絡(luò)智能體
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

2025年開放原子校源行清華大學(xué)站成功舉辦
激光雷達(dá)技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論