") OmniHand 2025系列靈巧手的核心技術(shù)
OmniHand 2025系列靈巧手的核心技術(shù)

OmniHand 2025系列靈巧手(含 靈動(dòng)款 與 專(zhuān)業(yè)款 )通過(guò)多項(xiàng)技術(shù)創(chuàng)新,在 高自由度、輕量化、多模態(tài)感知、成本控制 等方面實(shí)現(xiàn)了突破。以下是其核心技術(shù)亮點(diǎn):
1. 高自由度與輕量化設(shè)計(jì)
- 自由度配置 :
- 靈動(dòng)款 :16個(gè)自由度,重量?jī)H 500g ,尺寸 180mm ,適用于交互服務(wù)(如家庭陪伴、商場(chǎng)服務(wù))。
- 專(zhuān)業(yè)款 :19個(gè)自由度,重量 750g ,單指最大輸出 20N力 ,滿足精密工業(yè)作業(yè)需求(如3C電子組裝、汽車(chē)裝配)。
- 自研Powerflow關(guān)節(jié)模組 :
- 提升 扭矩密度 與 散熱性能 ,降低硬件成本約 40% ,減少對(duì)外部高端零部件依賴(lài)。
2. 多模態(tài)感知與力控技術(shù)
- 觸覺(jué)與力控精度 :
- 多模態(tài)感知融合 :
- 結(jié)合 力覺(jué)、觸覺(jué)、慣性測(cè)量(IMU) ,實(shí)現(xiàn)復(fù)雜環(huán)境下的自適應(yīng)操作(如抓取不規(guī)則物體)。
3. 自研核心模組與算法
- Powerflow關(guān)節(jié)模組 :
- 集成 伺服電機(jī)、減速器、驅(qū)動(dòng)電路 ,通過(guò) 模塊化設(shè)計(jì) 降低組裝復(fù)雜度,提升系統(tǒng)穩(wěn)定性。
- 力控與運(yùn)動(dòng)算法 :
- 支持 實(shí)時(shí)力控 與 手勢(shì)識(shí)別模型 ,適配 工業(yè)裝配、科研訓(xùn)練 等場(chǎng)景(如模擬人手操作醫(yī)療器械)。
4. 成本優(yōu)化與規(guī)模化適配
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)械臂
+關(guān)注
關(guān)注
13文章
576瀏覽量
25934 -
人形機(jī)器人
+關(guān)注
關(guān)注
7文章
859瀏覽量
18237 -
靈巧手
+關(guān)注
關(guān)注
0文章
46瀏覽量
173
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
從方案視角探究:靈巧手所需的電機(jī)驅(qū)動(dòng)與傳感技術(shù)
篇首語(yǔ):在靈巧手系統(tǒng)中,MCU 作為整個(gè)方案的控制核心,通過(guò)多維度技術(shù)整合與協(xié)同,實(shí)現(xiàn)復(fù)雜操作功能。例如,在靈巧手實(shí)現(xiàn)多自由度精準(zhǔn)調(diào)控時(shí),MCU 能夠憑借編程精確的控制

不到萬(wàn)元!智元機(jī)器人高自由度靈巧手做到了
電子發(fā)燒友網(wǎng)綜合報(bào)道 日前,智元機(jī)器人正式推出 OmniHand 2025 系列靈巧手,包含面向交互服務(wù)的「靈動(dòng)款」與專(zhuān)注專(zhuān)業(yè)作業(yè)的「專(zhuān)業(yè)款」兩大產(chǎn)品。靈動(dòng)款尺寸為 180mm,重量為

一體化電機(jī):靈巧手“動(dòng)力心臟”的技術(shù)進(jìn)階
)約為11%,這一增長(zhǎng)主要得益于人形機(jī)器人產(chǎn)業(yè)的帶動(dòng)。 ? 在工業(yè)自動(dòng)化、服務(wù)機(jī)器人、醫(yī)療康復(fù)等領(lǐng)域,靈巧手作為模擬人類(lèi)手部動(dòng)作的核心執(zhí)行部件,其作業(yè)精度、響應(yīng)速度與動(dòng)作靈活性直接決定了設(shè)備的整體性能。而電機(jī)作為靈巧手的“肌肉”
人形機(jī)靈巧手求推薦
預(yù)算2W左右吧,目前了解過(guò)鈦虎/靈心巧手的產(chǎn)品,主要是初次涉足這個(gè)行業(yè),比較門(mén)外漢,所以來(lái)論壇上想跟大家討論一下,求個(gè)推薦。
技術(shù)上的指標(biāo)要求:
1.精度超過(guò)±0.2mm
2.負(fù)載:3KG
發(fā)表于 05-08 14:45
藍(lán)牙核心技術(shù)概述
藍(lán)牙核心技術(shù)概述(一):藍(lán)牙概述藍(lán)牙核心技術(shù)概述(二):藍(lán)牙使用場(chǎng)景藍(lán)牙核心技術(shù)概述(三): 藍(lán)牙協(xié)議規(guī)范(射頻、基帶鏈路控制、鏈路管理)藍(lán)牙核心技術(shù)概述(四):藍(lán)牙協(xié)議規(guī)范(HCI、
發(fā)表于 11-24 16:06
含弧形自由度仿人靈巧手掌的機(jī)構(gòu)設(shè)計(jì)
提出了一種人手掌的簡(jiǎn)化模型,根據(jù)該模型,設(shè)計(jì)了仿人靈巧手掌的機(jī)構(gòu),使得只作為仿人靈巧手手指及其控制部件機(jī)架的手掌形成弧形自由度參加手部動(dòng)作,提高了仿人靈巧手通
發(fā)表于 08-13 10:10
?22次下載
機(jī)器人靈巧手抓持分類(lèi)器的設(shè)計(jì)與實(shí)現(xiàn)
機(jī)器人靈巧手抓持分類(lèi)器的設(shè)計(jì)與實(shí)現(xiàn).....
發(fā)表于 12-23 15:00
?8次下載
基于虛擬現(xiàn)實(shí)的機(jī)器人靈巧手遙操作平臺(tái)的設(shè)計(jì)和實(shí)現(xiàn)
基于虛擬現(xiàn)實(shí)的機(jī)器人靈巧手遙操作平臺(tái)的設(shè)計(jì)和實(shí)現(xiàn)
發(fā)表于 12-23 14:59
?18次下載
智能機(jī)器人靈巧手的研究
智能機(jī)器人靈巧手的研究!資料來(lái)源網(wǎng)絡(luò),如有侵權(quán),敬請(qǐng)?jiān)彛?/div>
發(fā)表于 12-25 09:52
?4次下載
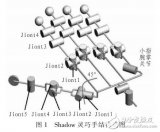
Shadow仿人靈巧手動(dòng)力學(xué)研究
仿人靈巧手應(yīng)用于中醫(yī)按摩領(lǐng)域,對(duì)手部的靈巧性有很高的要求,機(jī)器人動(dòng)力學(xué)逆問(wèn)題的研究旨在改善機(jī)器人控制系統(tǒng)工作的穩(wěn)定性和控制精度,實(shí)現(xiàn)對(duì)靈巧手的最優(yōu)控制,達(dá)到良好的動(dòng)態(tài)性能和最優(yōu)指標(biāo)。 文中研究的對(duì)象
發(fā)表于 11-16 14:20
?16次下載
氣動(dòng)人工肌肉驅(qū)動(dòng)的靈巧手控制系統(tǒng)
隨著靈巧手技術(shù)的發(fā)展,其控制方式也在不斷發(fā)展。自主控制和主從控制是其主要的兩種控制方式。靈巧手的自主控制是指其根據(jù)給定任務(wù)和外界條件,能夠自主的決定操作過(guò)程并完成任務(wù),體現(xiàn)了靈巧手的高智能性。在主從
發(fā)表于 03-26 15:49
?1次下載

英國(guó)Shadow Robot公司Shadow 靈巧手
Shadow靈巧手一共擁有24個(gè)自由度,其中20個(gè)由電機(jī)驅(qū)動(dòng),4個(gè)欠驅(qū)動(dòng)。這24個(gè)自由度每一個(gè)都有與人類(lèi)相近的運(yùn)動(dòng)范圍,允許其做出與人手類(lèi)似的動(dòng)作。 Shadow靈巧手它還具備了129個(gè)內(nèi)置傳感器
發(fā)表于 04-08 14:47
?3172次閱讀
人形機(jī)器人“靈巧手”,正在接近27個(gè)自由度的人手
電子發(fā)燒友網(wǎng)報(bào)道(文/黃晶晶)靈巧手是人形機(jī)器人核心零部件之一,以人類(lèi)的手來(lái)看通常被認(rèn)為具有27個(gè)自由度,自由度越高,其動(dòng)作越精細(xì)。特斯拉二代Optimus的靈巧手已經(jīng)擁有22個(gè)自由度。 靈巧

共繪具身智能未來(lái)藍(lán)圖:兆威機(jī)電ZWHAND靈巧手閃耀WAIC 2025
、特斯拉、華為、商湯科技等科技巨頭,以及眾多專(zhuān)注于機(jī)器人、大模型和AI芯片的創(chuàng)新企業(yè)。其中,深圳市兆威機(jī)電股份有限公司憑借其ZWHAND靈巧手在人形機(jī)器人核心部件領(lǐng)域的

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論