") ABB機器人互換位置指令
ABB機器人互換位置指令

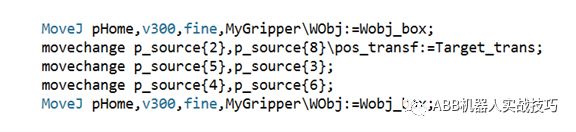
1)如上圖,希望把1-8位置產(chǎn)品,按照顏色排序,達(dá)到圖下效果
2)實現(xiàn)方法:
A)吸取位置2,放置到過渡點,
從位置8吸取,放置到位置2,
從過渡點吸取,放置到位置8
B)吸取位置5,放置到3
C)吸取位置4,放置到6
3)可以創(chuàng)建帶參數(shù)的例行程序,movechange pos1,pos2pos_transf:=target_transf
其中反斜杠表示可選參數(shù)。
即如果選擇了可選參數(shù)pos_transf,則該指令表示利用target_transf位置,對pos1和pos2互換
如果沒有選擇反斜杠pos_trans,則從pos1吸取,放置到pos2
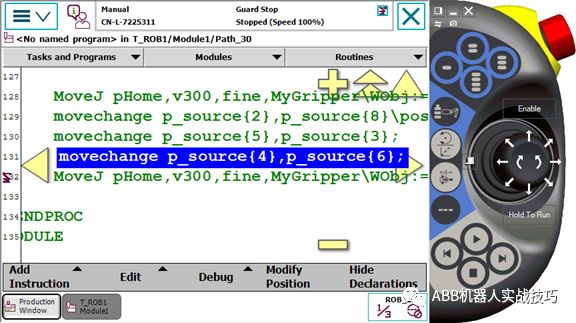
4)針對以上邏輯,創(chuàng)建指令如下:
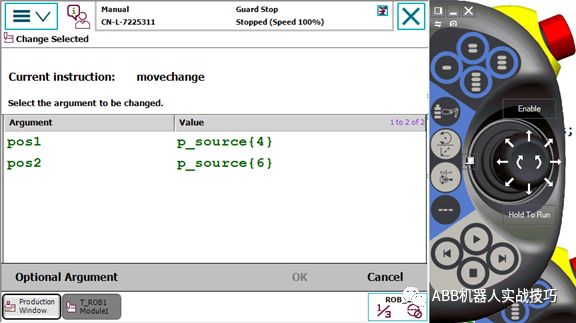
可選參數(shù)的選擇如下:
點擊movechange
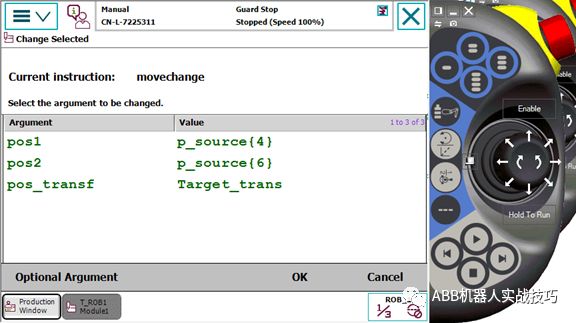
點擊左下角可選參數(shù),點擊use
輸入過度位置
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
指令
+關(guān)注
關(guān)注
1文章
623瀏覽量
37529 -
ABB機器人
+關(guān)注
關(guān)注
15文章
93瀏覽量
30917
原文標(biāo)題:ABB機器人互換位置指令
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
探索RISC-V在機器人領(lǐng)域的潛力
Pro則運行控制節(jié)點,通過Wi-Fi網(wǎng)絡(luò)接收Gazebo發(fā)布的傳感器信息(如激光雷達(dá)數(shù)據(jù)),并發(fā)布控制指令(速度指令)來驅(qū)動機器人模型移動和避障。
? 體驗: MUSE Pi Pro的K1 CPU在處理
發(fā)表于 12-03 14:40
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
瑞芯微RK3576 AIoT處理器處理器憑借其卓越的多屏異顯與8路攝像頭接入能力,為機器人領(lǐng)域帶來革新。米爾電子MYD-LR3576開發(fā)板實測數(shù)據(jù)顯示,在高負(fù)載下CPU占用僅34%,完美實現(xiàn)多路視覺
發(fā)表于 10-29 16:41
小蘿卜機器人的故事
經(jīng)過我的申請,
馬老師發(fā)放了,
小蘿卜機器人的,
開發(fā)權(quán)限,
原來的小蘿卜公司,
因為經(jīng)營不善倒閉,
作為科研產(chǎn)品,
幾個技術(shù)對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發(fā)表于 10-23 05:24
突發(fā)!ABB機器人業(yè)務(wù)易主,軟銀53.75億美元接盤
電子發(fā)燒友網(wǎng)報道(文 / 吳子鵬)10 月 8 日,瑞士工程巨頭 ABB 宣布,將以 53.75 億美元的價格將其機器人業(yè)務(wù)出售給日本軟銀集團(tuán)。這一交易不僅標(biāo)志著 ABB 戰(zhàn)略轉(zhuǎn)型的關(guān)鍵一步,也預(yù)示
什么是機器人?追溯機器人技術(shù)的演變和未來
的定義。機器人的定義,真如表面看起來那么簡單直白?還是比我們所認(rèn)為的更為復(fù)雜呢? 從本質(zhì)上講,機器人是一種可編程機器,能夠感知、處理信息,并自主或在一定程度的人工指令引導(dǎo)下執(zhí)行任務(wù)。與

工業(yè)機器人的特點
的基礎(chǔ),也是三者的實現(xiàn)終端,智能制造裝備產(chǎn)業(yè)包括高檔數(shù)控機床、工業(yè)機器人、自動化成套生產(chǎn)線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產(chǎn)線、智能農(nóng)機、3D 打印機等領(lǐng)域。而智能制造裝備中工業(yè)
發(fā)表于 07-26 11:22
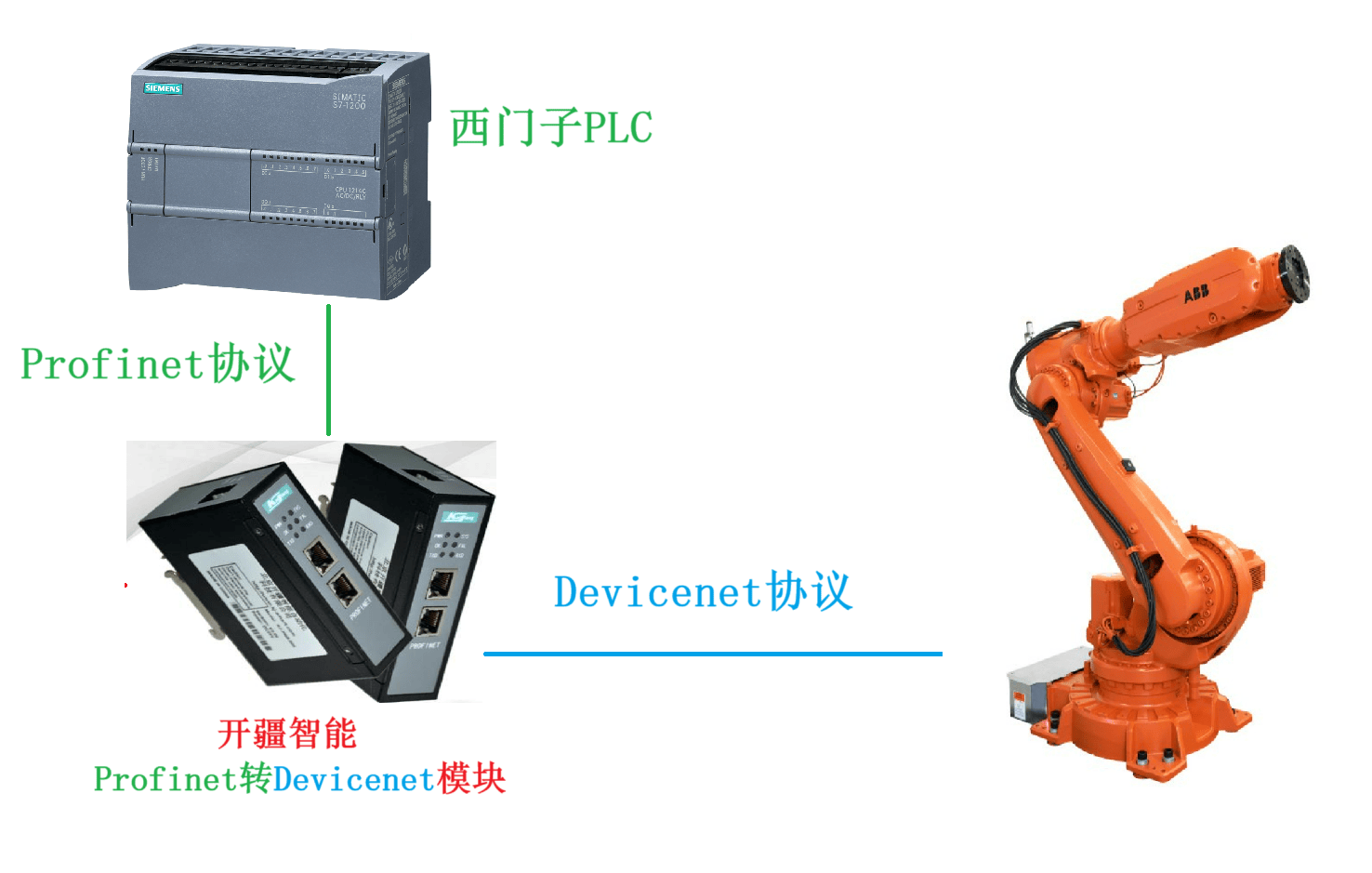
開疆智能Profinet轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人配置案例
本案例是西門子PLC通過開疆智能研發(fā)的Profinet轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人,網(wǎng)關(guān)作為Devicenet從站,ABB機器人作為主站進(jìn)行通訊。具體步驟如下。

開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接三菱PLC與ABB機器人配置案例
本案例是三菱PLC通過開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人的配置案例,具體分為三部分設(shè)置,分別為三菱PLC設(shè)置,ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)的配置以及ABB

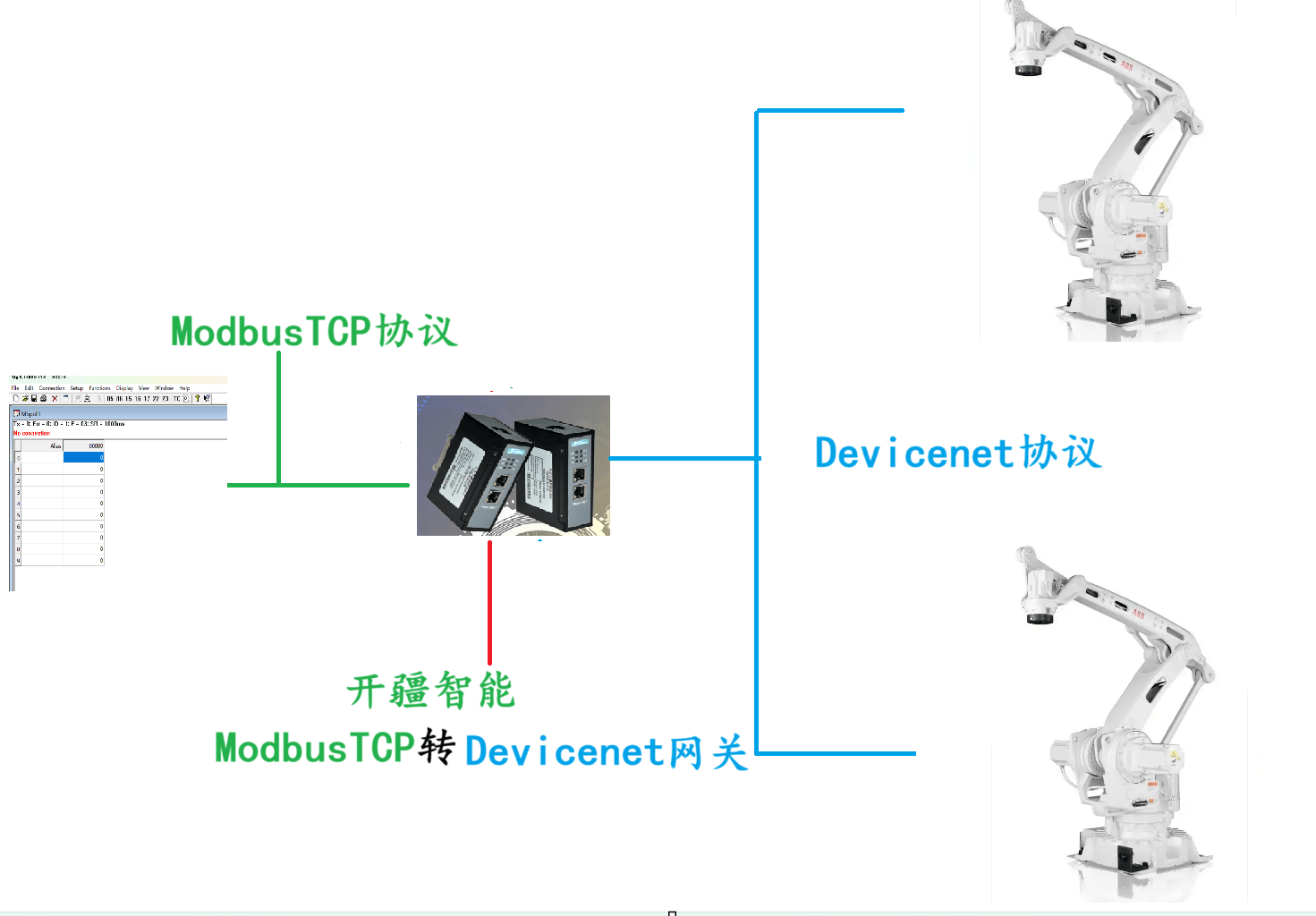
開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人配置案例
本案例是模擬ModbusTCP主站軟件通過開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人的配置案例,具體過程如下。 配置過程 ABB機器人IO板配置 1、簡介 (
開疆智能Profient轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接ABB機器人MODBUS TCP通訊案例
本案例是通過開疆智能Profinet轉(zhuǎn)ModbusTCP網(wǎng)關(guān)將西門子PLC與ABB機器人進(jìn)行通訊 因西門子PLC采用Profinet協(xié)議,而ABB機器人采用的是ModbusTCP通訊。

盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
詳細(xì)介紹機場智能指路機器人的工作原理
負(fù)責(zé)接收旅客的語音指令,以便機器人理解旅客的需求。
環(huán)境感知與信息融合 :這些傳感器收集到的信息會進(jìn)行融合處理。例如,激光雷達(dá)提供的距離信息和攝像頭捕捉的視覺信息相結(jié)合,能讓機器人更準(zhǔn)確地識別周圍環(huán)境
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫,是通信總線,協(xié)調(diào)多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發(fā)
發(fā)表于 04-30 01:05
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
講解了如何在 ROS 2 中實現(xiàn)機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節(jié)點,可以接收來自上層的控制指令,如速度指令或目標(biāo)位置
發(fā)表于 04-27 11:24



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論