") GNSS模擬器如何賦能自動駕駛?聚焦HIL、多實例與精準軌跡仿真的技術優(yōu)勢
GNSS模擬器如何賦能自動駕駛?聚焦HIL、多實例與精準軌跡仿真的技術優(yōu)勢

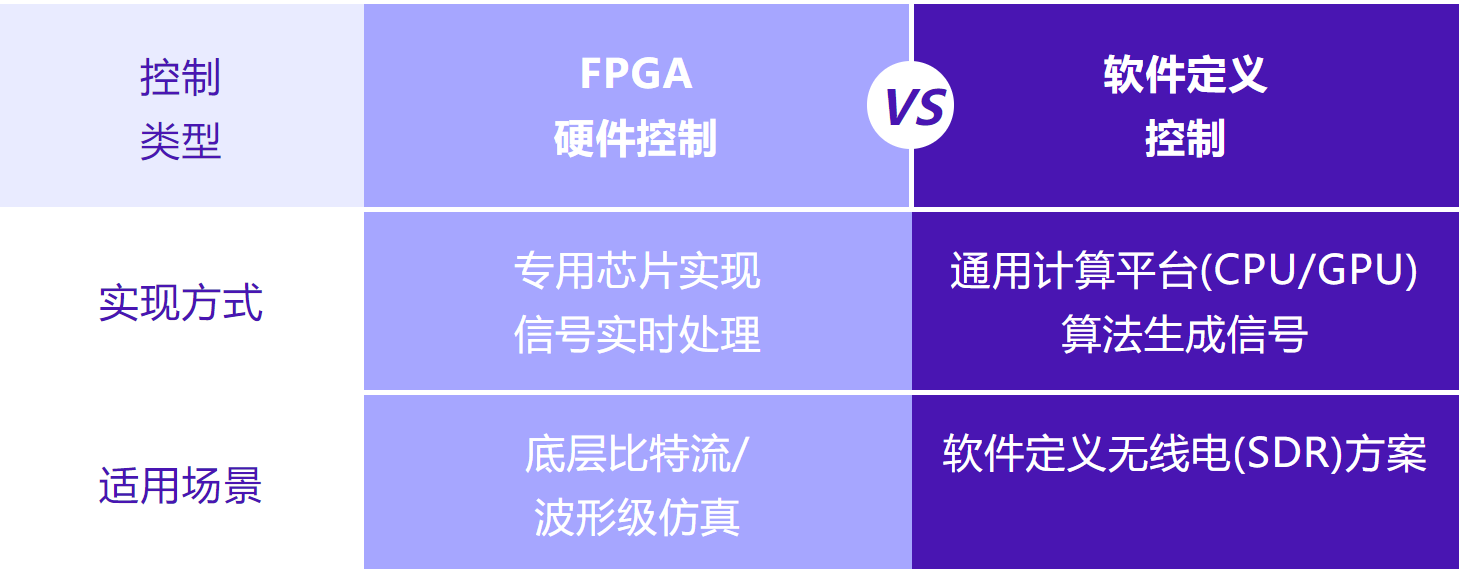
上期,我們探討了德思特基于軟件定義架構的GNSS模擬器及其核心——Skydel仿真引擎的特點。 該方案支持多實例并行、具備較低延遲,并關注自動化與擴展性,利用CPU/GPU在通用計算平臺動態(tài)生成信號,旨在為測試工作提供相較于傳統(tǒng)FPGA方案更多的靈活性與開發(fā)便利。
技術特性為我們提供了新的可能性,那么如何更好地將其融入實際測試流程?本期,我們將跟隨德思特技術團隊的經驗分享,一同了解一線應用的關鍵環(huán)節(jié)。
硬件配置與信號需求
問:
答:
DTA-2116的帶寬是100MHz、工作頻率是35-3125MHz(包含了L1L2L5L6S),因此每張卡均可進行任意GNSS頻段的仿真,但同一時間僅能進行單獨頻段的仿真。使用多張SDR主要是為了實現(xiàn)同時對于多個頻段的仿真,即多頻仿真。
問:
實際測試中需要多少種信號完成定位?
答:
這個問題的答案取決于接收機廠商對于芯片的設計,一般而言單獨的GPSBEIDOU等的L1頻點就可以實現(xiàn)定位,如果想要更好的定位效果與抗干擾能力,通常會使用多個星座多個頻段同時工作,即多星多模。
仿真操作與場景設置
問:
德思特GNSS模擬器中定義仿真軌跡的Vehicle Simulation與Track Playback的區(qū)別?Trajectory中Vehicle Simulation
與Track Playback的區(qū)別?
答:
Vehicle Simulation 使用是路線,文件中包含各位置的速度,通過模擬后能夠獲得軌跡。
Track Playback 使用的是軌跡,文件中包含的是各時間點的位置(如 NMEA),軌跡存在地面/水面或空中/太空兩種模式的插值。
問:
Skydel參數(shù)設置重點關注項?
答:
三個要素:星座頻點+時間+軌跡
兩個關鍵點:功率大小、仿真的傳播模型
問:
衛(wèi)星功率設置的是發(fā)射功率還是接收功率?
答:
GNSS模擬器模擬的是到達接收機前端的信號功率,我們在設備內控制信號的大小變化是對接收機前端信號大小的直接控制,但實際上實現(xiàn)原理講是對衛(wèi)星發(fā)射功率的控制。
應用場景與優(yōu)勢
問:
德思特GNSS模擬器在自動駕駛測試中的核心優(yōu)勢?
答:
高兼容性:
無縫集成dSpace/Carmaker/VTD等平臺;支持V2X/C-V2X/T-box測試場景。
硬件在環(huán)(HIL)仿真:
業(yè)界領先的低延遲控制(毫秒級響應);
實時數(shù)據(jù)回傳與位置動態(tài)調整。
全球軌跡復現(xiàn):
通過KML/CSV地圖導入實現(xiàn)海外路況本地仿真;大幅降低實地測試成本。
多維交通模擬:
支持街道地圖導入;
靜態(tài)/動態(tài)軌跡快速部署。
多實例擴展:
雙天線測試;
車隊協(xié)同仿真;
RTK高精度定位驗證。
多傳感器融合:
提供IMU仿真接口;
支持GNSS+IMU聯(lián)合測試場景。
審核編輯 黃宇
-
仿真
+關注
關注
54文章
4482瀏覽量
138245 -
模擬器
+關注
關注
2文章
1010瀏覽量
45670 -
GNSS
+關注
關注
9文章
990瀏覽量
51134
發(fā)布評論請先 登錄
GNSS衛(wèi)星導航模擬器的功能與應用介紹,gnss導航模擬器,gnss衛(wèi)星模擬器
自動駕駛汽車為什么會發(fā)生軌跡漂移?

汽車自動駕駛的太陽光模擬應用研究


aiSim仿真:OpenDrive地圖應用與多環(huán)境測試# HIL測試# 端到端# 自動駕駛# 智能駕駛# 仿真
索尼FCB-EV9520L機芯如何賦能自動駕駛安全
GNSS模擬器如何賦能無人機整機檢測?揭秘高效測試背后的黑科技

GNSS模擬器核心架構如何實現(xiàn)?技術主管深度解讀設計原理
太陽光模擬器 | 在汽車自動駕駛開發(fā)中的應用
自動駕駛汽車在隧道、山區(qū)如何精準定位?

康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證

自動駕駛汽車是如何準確定位的?

搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發(fā)展
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
助力dSPACE實現(xiàn)基于GNSS的駕駛功能的HIL仿真 ,加速自動駕駛測試革命!

端到端自動駕駛多模態(tài)軌跡生成方法GoalFlow解析



 工商網監(jiān)
工商網監(jiān)
評論