") 多傳感器集成的 IMU,如何協(xié)同工作提升無人機性能?
多傳感器集成的 IMU,如何協(xié)同工作提升無人機性能?

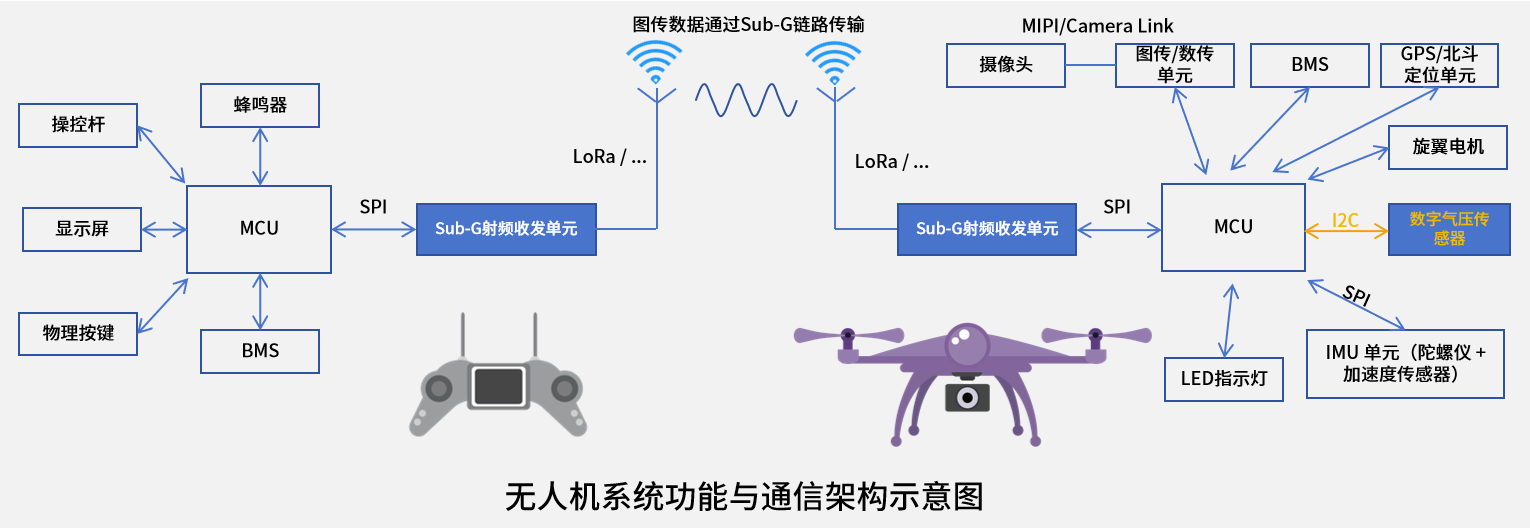
在無人機的飛行控制系統(tǒng)中,“感知” 是比 “控制” 更基礎的命題 —— 無法精準判斷自身姿態(tài)(偏航、俯仰、滾動),再先進的飛控算法也無計可施。傳統(tǒng)解決方案,如果追求高精度則需承擔高昂成本與龐大體積,選擇小型化則不得不犧牲測量穩(wěn)定性。
ER-MIMU-103 MEMS IMU正是為破解這一矛盾而生。它將 3 軸陀螺儀、3 軸加速度計、3 軸磁力計和氣壓計集成于47mm×44mm×14mm 的模塊中,其厚度僅有14mm!在 “小體積” 與 “高精度” 之間找到了完美平衡。多種傳感器通過協(xié)同工作,能極大地提升無人機的環(huán)境感知能力,主要體現(xiàn)在姿態(tài)、位置、速度估計和環(huán)境適應上。
所有傳感器的運動測試、溫度補償均在出廠前完成,開發(fā)者無需二次校準,直接接入系統(tǒng)即可使用,大幅縮短集成周期。
多傳感器協(xié)同:捕捉全維度運動狀態(tài)
3 軸陀螺儀負責測量旋轉角速度(如無人機轉向時的角度變化),3 軸加速度計測量線性加速度(如急加速/減速),3 軸磁力計通過測量
地球磁場修正航向偏差,壓力傳感器則實時監(jiān)測氣壓以計算飛行高度。
陀螺儀:零偏不穩(wěn)定性0.1o/h,0.05o/√h角度隨機游走,快速捕捉無人機的旋轉運動;
加速度計:±30g動態(tài)范圍,10μg零偏不穩(wěn)定性,測量運動加速度;
磁力計:±2.5 Gauss磁測量范圍,確保復雜電磁環(huán)境下的航向精度;
氣壓計:1.5mbar氣壓絕對精度,實現(xiàn)高度鎖定。
這些傳感器如何協(xié)同工作?
陀螺儀:提供短期、高頻的姿態(tài)變化的角速度信息。
加速度計:測量運動線性加速度;
磁力計:提供相對于地球磁北極的絕對航向(偏航角)參考;
氣壓計:提供絕對高度參考。
使用傳感器融合算法,融合后得到穩(wěn)定、準確、漂移極小的實時三維姿態(tài)信息(俯仰、橫滾、偏航),實現(xiàn)精準懸停、定高飛行、地形跟隨、自動著陸等能力,這是無人機穩(wěn)定飛行、自主控制的基礎。
審核編輯 黃宇
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791317 -
無人機
+關注
關注
236文章
11300瀏覽量
195658 -
IMU
+關注
關注
6文章
417瀏覽量
47877
發(fā)布評論請先 登錄
無人機激光傳感器輔助降落原理

Amphenol AUAV雙壓力傳感器系列:無人機應用的精準之選

光伏電站無人機巡檢系統(tǒng)技術解析
無人機操控核心:智能飛行的技術引擎
離軸技術:賦能無人機精準配送的核心芯片應用
IMU的精度對無人機姿態(tài)控制意味著什么?
為什么IMU是無人機穩(wěn)定控制的的核心?
使用高精度IMU對無人機系統(tǒng)有何提升?
IMU 能為無人機提供什么數(shù)據(jù)?
為什么高端無人機不會在IMU精度上妥協(xié)?
適用于無人機的 IMU 有哪些要求?

優(yōu)化無人機航向控制的核心:IST8310飛控地磁傳感器解析

3000W激光反制無人機系統(tǒng) - 全天候守護重點區(qū)域安全防線
無人機傳感器線圈的設計與制造工藝詳解



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論