") Arm方案 基于Arm架構的邊緣側設備(樹莓派或 NVIDIA Jetson Nano)上部署PyTorch模型
Arm方案 基于Arm架構的邊緣側設備(樹莓派或 NVIDIA Jetson Nano)上部署PyTorch模型

人工智能 (AI) 在邊緣計算領域的應用正迅速普及。因此,在基于 Arm 架構的邊緣側設備上部署機器學習模型變得日益重要。基于 Arm 架構的處理器憑借低功耗和高能效等優(yōu)勢,在嵌入式系統(tǒng)中得到了廣泛應用。
本文將為你展示如何在樹莓派或 NVIDIA Jetson Nano 等基于 Arm 架構的邊緣側設備上部署 PyTorch 模型。
前提條件
在開始之前,請確保準備好以下內(nèi)容:
硬件:一臺基于 Arm 架構的設備,例如樹莓派、NVIDIA Jetson Nano 或其他類似的邊緣側設備。
軟件
設備上必須安裝 Python 3.7 或更高版本。
一個與 Arm 架構兼容的 PyTorch 版本。
一個經(jīng)過訓練的 PyTorch 模型。
依賴項:必須安裝諸如 torch 和 torchvision 等庫以及其他所需的 Python 包。
第 1 步
準備 PyTorch 模型
訓練或加載模型
在開發(fā)機器上訓練模型,或從 PyTorch 模型庫加載預訓練模型:
import torch
import torchvision.models as models
# Load a pre-trained model
model = models.resnet18(pretrained=True)
model.eval()
優(yōu)化模型
將模型轉(zhuǎn)換為 TorchScript 格式,以獲得更好的兼容性和性能:
scripted_model = torch.jit.script(model)
torch.jit.save(scripted_model, "resnet18_scripted.pt")
第 2 步
設置基于 Arm 架構的邊緣側設備
安裝依賴項
確保 Arm 設備上已安裝 Python。
安裝 PyTorch
使用專門為 Arm 設備構建的版本。例如,樹莓派用戶可以運行以下命令:
pip install torch torchvision
驗證安裝
import torch
print(torch.__version__)
print(torch.cuda.is_available()) # Check if CUDA is supported (for devices like Jetson Nano)
第 3 步
將模型部署到設備上
傳輸腳本模型
使用 scp 或 USB 驅(qū)動器,將模型文件 (resnet18_scripted.pt) 復制到 Arm 設備:
scpresnet18_scripted.pt user@device_ip:/path/to/destination
運行推理
編寫 Python 腳本以加載模型并運行推理:
import torch
from PIL import Image
from torchvision import transforms
# Load the model
model = torch.jit.load("resnet18_scripted.pt")
model.eval()
# Preprocess an input image
preprocess = transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
img = Image.open("test_image.jpg")
img_tensor = preprocess(img).unsqueeze(0) # Add batch dimension
# Perform inference
with torch.no_grad():
output = model(img_tensor)
print("Predicted class:", output.argmax(1).item())
第 4 步
針對邊緣側性能進行優(yōu)化
量化
使用 PyTorch 的量化技術來減小模型大小并提高推理速度:
from torch.quantization import quantize_dynamic
quantized_model = quantize_dynamic(
model, {torch.nn.Linear}, dtype=torch.qint8
)
torch.jit.save(quantized_model, "resnet18_quantized.pt")
利用硬件加速
對于配備 GPU 的設備(如 NVIDIA Jetson Nano),確保使用 CUDA 進行加速計算。
安裝支持 GPU 的相應 PyTorch 版本。
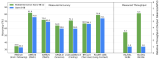
性能基準測試
測量延遲和吞吐量,以驗證模型在邊緣側設備上的性能:
import time
start_time = time.time()
with torch.no_grad():
for _ in range(100):
output = model(img_tensor)
end_time = time.time()
print("Average Inference Time:", (end_time - start_time) / 100)
第 5 步
大規(guī)模部署
容器化應用
使用 Docker 創(chuàng)建可移植的部署環(huán)境。
示例 Dockerfile:
FROM python:3.8-slim
RUN pip install torch torchvision pillow
COPY resnet18_scripted.pt /app/
COPY app.py /app/
WORKDIR /app
CMD ["python", "app.py"]
監(jiān)控與更新
實施日志記錄和監(jiān)控,確保應用順利運行。
使用 Prometheus 或 Grafana 等工具獲取實時洞察。
結論
要在基于 Arm 架構的邊緣側設備上部署 PyTorch 模型,需要對模型進行優(yōu)化、準備好相應軟件并使用合適的硬件。上述步驟可幫助開發(fā)者在邊緣側部署 AI 應用,從而在靠近數(shù)據(jù)生成的位置實現(xiàn)快速、高效的推理。快來動手試試吧!
-
ARM
+關注
關注
135文章
9564瀏覽量
392579 -
ARM架構
+關注
關注
15文章
185瀏覽量
39260 -
邊緣計算
+關注
關注
22文章
3537瀏覽量
53546 -
pytorch
+關注
關注
2文章
813瀏覽量
14885 -
邊緣AI
+關注
關注
0文章
248瀏覽量
6193
原文標題:動手做!在基于 Arm 架構的邊緣側設備上部署 PyTorch 模型
文章出處:【微信號:Arm社區(qū),微信公眾號:Arm社區(qū)】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
NVIDIA Jetson模型賦能AI在邊緣端落地

邊緣AI算力臨界點:深度解析176TOPS香橙派AI Station的產(chǎn)業(yè)價值
如何在NVIDIA Jetson AGX Thor上部署1200億參數(shù)大模型

Arm Neoverse平臺集成NVIDIA NVLink Fusion
Immich智能相冊在樹莓派5上的高效部署與優(yōu)化

BPI-AIM7 RK3588 AI與 Nvidia Jetson Nano 生態(tài)系統(tǒng)兼容的低功耗 AI 模塊
什么是ARM架構?你需要知道的一切

如何在基于Arm架構的邊緣AI設備上部署飛槳模型
NVIDIA Nemotron Nano 2推理模型發(fā)布
Arm 洞察與思考:為什么 AI 向邊緣遷移的速度超乎想象
《電子發(fā)燒友電子設計周報》聚焦硬科技領域核心價值 第22期:2025.07.28--2025.08.1
NVIDIA Jetson + Isaac SDK 在人形機器人領域的方案詳解

樹莓派小技巧:無需鍵盤或顯示器,如何通過WiFi設置樹莓派?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論