 中國科學院院士最新署名文章:多項傳感器技術是人形機器人核心(前沿觀點)
中國科學院院士最新署名文章:多項傳感器技術是人形機器人核心(前沿觀點)

7月23日,《學習時報》刊發了中國科學院院士劉勝的最新署名文章《人形機器人走向大眾生活的技術密碼》,文章中,分析了加速人形機器人普及的數項核心技術和其中的研發難點,這些技術包括:柔性觸覺傳感器、壓力傳感器、AI芯片與多模態大模型、射頻濾波器、3D打印技術等。 《學習時報》于1999年9月創刊,由中共中央黨校(國家行政學院)主管主辦,面向全國,服務全黨,以各級黨政干部和廣大知識分子為主要對象,是國內外公開發行的全黨專門講學習的報紙。

專家檔案 劉勝,中國科學院院士,武漢大學集成電路學院院長、工業科學研究院執行院長。長期致力于芯片封裝及可靠性研究,推動我國封裝技術實現從“跟跑”到“并跑”的跨越式發展。2024年,帶領武漢大學科研團隊成功研制出人形機器人“天問”,突破了傳感器、靈巧手、仿生關節和芯片等領域的關鍵技術,為發展我國自主可控的人形機器人產業作出重要貢獻。2020年,獲國家科學技術進步獎一等獎。
當前,人形機器人正以顛覆性姿態重塑未來圖景,憑借深度融合人工智能、高端制造與新材料等尖端科技,有望成為繼計算機、智能手機、新能源汽車后的顛覆性、平臺性產品,是全球科技競爭的新賽道。從靈巧抓取精密零件到自如穿越復雜地形,從精準感知環境變化到快速響應決策,這些令人驚嘆的“超能力”背后,究竟藏著哪些核心技術密碼?
柔性觸覺傳感器讓“靈巧手”更靈敏
人形機器人的靈巧手是其關鍵技術之一。業界常言“制造人形機器人,半數難度在靈巧手”。人類手掌能憑借27塊骨骼、50余塊肌肉及100多個關節的協同,完成從捏取繡花針到搬運冰箱的極端操作。而機械靈巧手想要復刻這一生物力學奇跡,需在多重技術維度中實現精準平衡:材料要兼顧輕質與耐磨耐腐蝕;傳動系統需在高效率與高精度間抉擇;控制算法更要攻克多關節協同的復雜難題。
破解這一難題就要靠柔性觸覺傳感器的突破。作為靈巧手的“觸覺神經”,其核心功能是通過導電橡膠、石墨烯薄膜等材料,像人類皮膚般感知壓力分布、溫度及材質。但傳統傳感器不僅響應速度慢、難以在毫秒級反饋觸覺信息,且耐溫性、耐久性較差,無法精準捕捉微小應力變化。
為突破上述困境,新型柔性觸覺傳感器通過柔性基底與微型化設計實現革新。其壓力響應靈敏度可達5毫秒,壓力測量精度誤差控制在0.1%—0.01%;封裝可靠性經5.4億次壓力循環測試驗證,芯片失效率低于10ppm,并朝著1ppb級目標邁進,可滿足20年以上使用壽命需求。這些技術突破讓機械靈巧手逐步接近人類手掌的感知與操作精度,為實現人形機器人的復雜任務執行能力奠定堅實基礎。
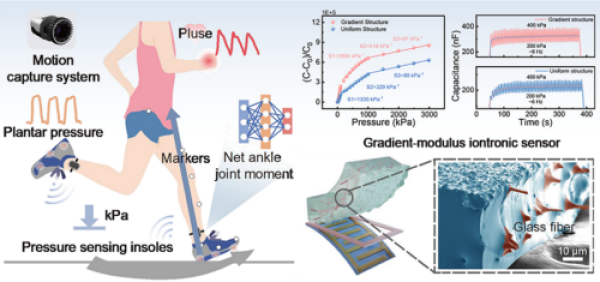
壓力傳感器讓機器人“仿生腳掌”走得穩
人形機器人要實現類人化運動,不僅需要靈巧的雙手完成精細操作,更依賴“仿生腳掌”實現穩定行走。然而,平衡控制一直是全球人形機器人研發的核心難題,失衡、打滑、摔倒等狀況頻發。人類行走時,足底神經能實時感知地面硬度、坡度及細微變化并反饋給大腦;對機器人而言,由力傳感器構成的“腳底神經”感知網絡,正是實現動態平衡與環境交互的關鍵。但實際應用中,人形機器人面臨諸多挑戰,一顆小石子產生的瞬間沖擊力,或是從高臺跳下時的過載,都可能導致機器人失衡;同時,高成本、大尺寸、低抗振性等問題,也制約著力傳感器的普及。
如何解決呢?傳統壓力傳感器,要靠人工涂膠水把芯片粘在底座上,只能單個生產,不僅費時費力、成本高,做出來的傳感器還不夠小巧。并且,機器人一動起來,膠水容易受熱變軟,導致耗電增加、數據不準,遇到撞擊還容易脫落損壞。人形機器人全身需要密密麻麻安裝上百個傳感器,這種傳統壓力傳感器顯然不適用。
為突破這些瓶頸,新一代力傳感器在制造工藝上進行了革命性創新。摒棄傳統膠水連接方式,采用精密印刷工藝將感應材料附著于金屬基材,并通過高溫燒結形成共晶層,實現材料的緊密融合。這一技術不僅讓傳感器體積縮小至傳統產品的1/50,更將抗過載能力從3倍提升至10倍,能耐受兩三百度高溫而不發生蠕變,確保電信號測量精準,使用壽命長達20年。生產模式也從低效的手工涂膠單件生產,升級為自動化批量印刷燒結,大幅降低成本,實現了低成本、自動化、大批量、高效率、高一致性的生產。這項技術突破不僅讓人形機器人行走更穩健,更推動了汽車傳感器等智能裝備領域的技術升級,打通了多領域技術協同創新的通路。
“大腦”與“小腦”的精密協作
人形機器人的大小腦控制系統,是實現人工智能技術的核心組件。“大腦”負責環境感知與決策,整合來自觸覺傳感器、攝像頭、激光雷達等設備的信號;“小腦”則專注于運動傳感,控制動作生成,主要依賴力傳感器與慣性傳感器的數據反饋。與人類模糊的控制機制不同,機器人通過量化傳感數據并持續反饋,將復雜任務拆解為多個步驟,借助機器學習逐一完成。
人形機器人大腦模擬人類的思考推理、交互溝通、任務理解與編排以及記憶能力,其核心技術依托高算力、高帶寬的人工智能芯片(AI芯片)與多模態大模型。然而,研發AI芯片面臨雙重挑戰:一方面需追求高AI算力,另一方面要保證高內存帶寬。先進的芯片制程工藝雖能提升性能,但高密度設計導致功耗劇增;同時,多內存控制器的布局會占用大量芯片面積,難以實現合理配置。
要讓機器人像人類一樣感知世界并快速決策,AI芯片必須同時滿足“算得快”與“傳得快”的要求。傳統芯片因中央處理器頻繁調用外部存儲器數據,存在能耗高、延遲大的問題,如同廚師反復往返廚房與倉庫。為解決這一困境,芯片設計創新提出將外部存儲移至芯片內部,使計算在芯片內完成,從而簡化系統、降低通信開銷、提升通信效率和模型推理速度。三維堆疊技術的應用,突破了傳統芯片平面電路限制,通過減薄芯片并立體堆疊,增加集成度與內存帶寬,在提升AI算力的同時優化芯片良率。這些技術革新為實現高效智能的機器人大腦奠定了基礎。
人形機器人的“小腦”承擔著類人運動控制的關鍵職能。當大腦AI芯片通過感知系統完成決策后,需與小腦進行高效通信,由小腦負責運動傳感與動作生成。其核心要求體現在三個方面:第一,精確控制能力。小腦需融合多種傳感器輸入數據,對多個自由度進行綜合判斷與協調控制。要求將控制指令時延壓縮至毫秒級,周期性抖動控制在微秒級,對電子器件與執行器的性能要求近乎極致。第二,高可靠性。為確保運動穩定性,小腦需采用冗余指令機制,同一指令多次發送,避免因單次信號傳輸失誤導致動作偏差,同時,核心部件需達到航天級低失效率標準,確保長時間穩定運行。
當前機器人動作生硬卡頓的根源,正源于“小腦”的指令頻率不足。若每秒僅發送一條運動指令,機器人動作必然呈現機械式頓挫;而當指令頻率提升至每秒1000次,實時反饋位置、速度與力度參數時,機器人動作便可達到類人的流暢絲滑效果。這意味著,高性能的小腦芯片必須在快速響應、動作連貫性與極端可靠性之間實現完美平衡,而攻克這些技術難點,正是推動人形機器人運動控制技術突破的關鍵所在。
除了小腦芯片,與之匹配的運動訓練模型也是機器人小腦系統迭代升級的關鍵。首先要利用人體虛擬現實技術在真實環境下進行數據采集,然后在云端虛擬環境中通過強化學習進行訓練,之后再將學習成果部署到真實物理實體。這種訓練方式有助于加快機器人的學習過程。武漢大學團隊通過16臺攝像機和三維測力平臺,逐幀模擬人類行走的步態。當精密芯片遇上真實的人體運動數據庫,機器人才能從機械的模仿者進化成會運動的生命體,才能真正走進千家萬戶。
射頻濾波器——實現精準的通信功能
射頻濾波器是人形機器人實現精準通信的核心器件,其功能類似收音機調臺——通過篩選有用信號、排除干擾信號,保障設備精準收發信息。一部手機通常需要50—100顆射頻濾波器芯片,其性能直接決定通信質量。然而,該領域長期被國外企業壟斷,他們憑借數十年技術積累構建了涵蓋材料、制造、算法的立體技術壁壘,國內企業面臨專利封鎖、設備落后、人才稀缺等多重困境。
突破壟斷的關鍵在于技術創新。國外傳統濾波器采用不規則多邊形結構(已申請專利),但通過建模仿真發現其曲面不光滑、雜波明顯、性能欠佳。我們通過AI算法推理計算,創新性地提出水滴形濾波器結構——這一擁有自主知識產權的新型設計,不僅突破了專利封鎖,更實現了性能的顯著提升,器件曲面光滑度與信號純凈度均達到國際領先水平。目前,武漢大學已申請相關專利348項(授權176項),并通過產學研合作孵化出完全自主知識產權的國產濾波器公司。同時,為加速高端濾波器國產化,我們正在構建全球化研發與生產體系。
輕量化是必須跨越的門檻
人形機器人要真正融入人類世界,輕量化是必須跨越的門檻。在工業制造、醫療護理等專業領域,以及家庭服務、教育陪伴、養老照料等日常場景中,更輕的體型意味著更低的能耗、更靈活的動作和更高的安全性。然而,實現人形機器人“減重”面臨多重矛盾挑戰,既要保證機身強度,又要精簡材料;既要集成更多傳感器,又要控制整體重量;既要提升續航能力,又不能使用笨重電池。
3D打印技術為解決這一難題提供了創新路徑。自20世紀80年代3D打印技術發明以來,這項技術已發展成熟,其核心優勢在于通過構建復雜輕巧的結構實現部件一體化打印,顯著減輕重量;支持快速原型設計,加速創新迭代。但將3D打印應用于人形機器人制造仍存在三大技術挑戰:結構強度與疲勞性能保障(傳統拓撲優化易產生內部缺陷,需確保機械強度、疲勞強度及抗沖擊性能)、工藝質量控制(需解決風場控制、形貌監測等問題,避免未融合顆粒、氣孔、裂紋等缺陷)、承力件壽命管理(通過斷裂力學與損傷力學研究,建立缺陷產生機理模型,實現缺陷精確定位與實時消除)。
當前解決方案是將3D打印在線監測技術與激光強化技術結合,實現工藝過程可視化、質量缺陷可檢測、力學性能可調控。該技術已成功應用于鐵基、鈦基、鋁基等合金材料的機器人部件制造,包括肩部支架、胸骨框架、小臂、大腿、手指及關節等關鍵承力結構,為人形機器人輕量化發展提供了可靠支撐。
未來發展
全球正加速布局機器人產業,2025年被業內視為人形機器人商業化量產元年。我國作為全球領先的人形機器人生產大國,已在AI芯片、柔性關節、動態平衡算法等領域取得突破。同時,憑借龐大市場需求、強大制造能力及產業鏈優勢,中國在基礎元器件制造、系統集成和場景開發等領域潛力巨大。
從發展階段來看,人形機器人需歷經從全尺寸樣機初步行走,到系統高度集成突破,再到實現跑跳等高動態運動能力,最終邁向產業化落地的過程。面向未來,產業發展遵循短期(5年)、中期(15年)、長期(30年)的技術路線圖:短期以材料創新為核心,研發復合材料、高強鋼等輕量化高強度材料,同時提升電機、傳感器、芯片等關鍵部件可靠性,推進通信物聯網技術集成,實現基礎人機交互;中期致力于復雜環境自主感知、仿生材料(如仿生皮膚)應用及高承重任務執行;長期目標則是實現類人智能的自主學習與情感交互,賦予機器人多場景自適應能力。各階段均需同步推進安全可靠性(自檢測/自修復)、協同技術(邊緣計算+5G/6G云端協同)的突破,以及應用場景從工業制造向家庭服務等領域的拓展。
未來,我們需進一步聚焦核心零部件國產化、AI芯片研發及場景化應用創新三大方向,持續攻克“卡脖子”技術,實現從基礎材料到智能系統的全鏈條突破,推動人形機器人從實驗室走向大眾生活,助力社會服務體系的全面智能化升級。
-
傳感器技術
+關注
關注
51文章
354瀏覽量
100281 -
人形機器人
+關注
關注
7文章
975瀏覽量
18496
發布評論請先 登錄
中國科學院專家一行蒞臨致真精密儀器考察調研
中國科學院:高線性類皮膚柔性傳感器研究取得系列進展

中國科學院院士王曦,遞補為中央委員

人形機器人傳感器產業鏈最新分析:力、觸覺、IMU、視覺傳感器為主流!(全面)

惠山經開區舉辦“機器人未來技術展望”專題講座 丁漢院士解析前沿趨勢

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
中國科學院沈陽自動化研究所:研究基于石墨烯/PDMS封裝的醫用膠帶柔性傳感器,用于水下機器人運動檢測

恭賀 | 晟鵬創始人成會明院士當選歐洲科學院院士!

ADI人形機器人的“感覺神經 + 電力神經元”核心芯片方案盤點
納芯微磁傳感器技術推動人形機器人性能提升




 工商網監
工商網監
評論