 面向智駕的車規級高精度RTK模塊UM680A的引腳功能
面向智駕的車規級高精度RTK模塊UM680A的引腳功能

引腳功能描述(圖)
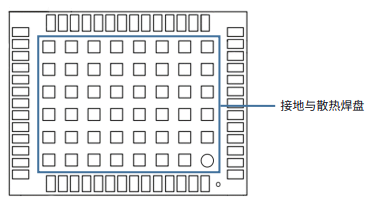
UM680A的引腳定義參見圖 2-1。

圖 2-1 UM680A-12/UM680A-13管腳圖
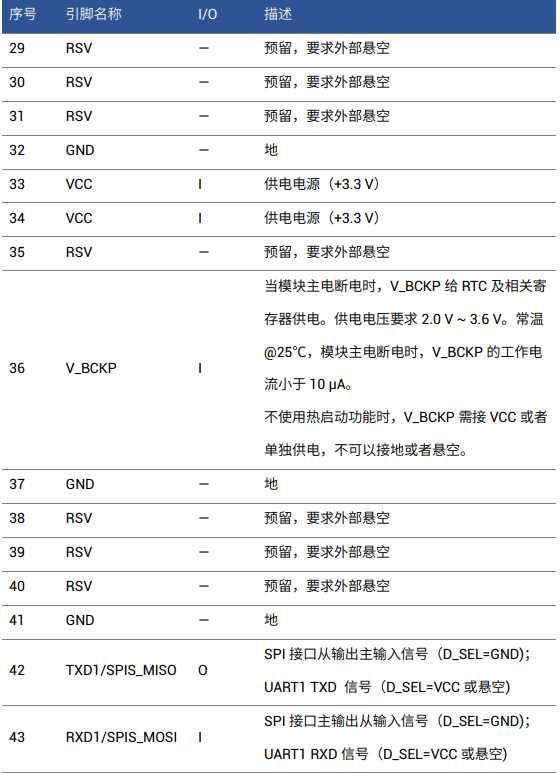
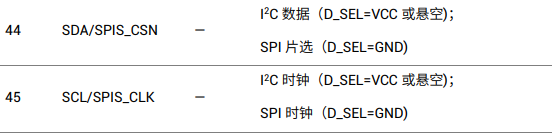
表 2-1 UM680A引腳說明

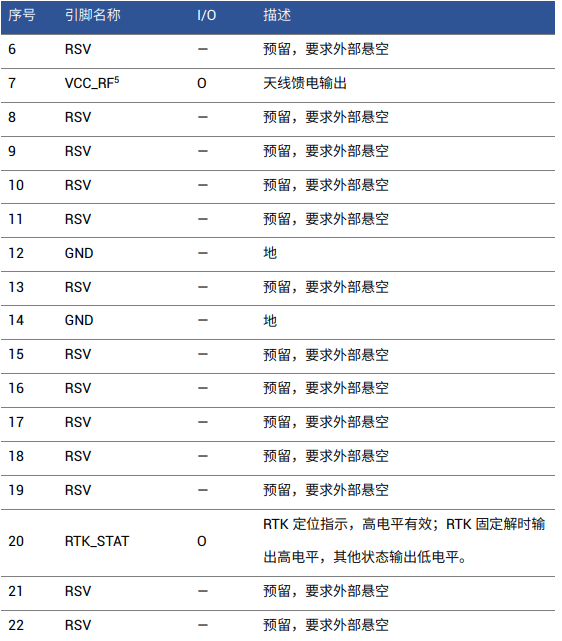

5不建議 VCC_RF給天線饋電(因受限于模塊體積,VCC_RF并未做過防雷擊、防浪涌優化)。
注:最新版本,請以和芯星通官方發布的最新文件為準。
最新文件請以和芯星通官網資料為準。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
引腳
+關注
關注
16文章
2115瀏覽量
55925 -
RTK
+關注
關注
8文章
206瀏覽量
39181
發布評論請先 登錄
相關推薦
熱點推薦
藍牙5.4和Wi-Fi 7車規級模塊怎么選?FSC-BW5028MV給你答案
規級方案到底好在哪兒。 一、AEC-Q100 規范解析:車規級認證的核心要求 很多人在選車載無線模塊
IATF 16949車規級模塊:重新定義車載通信的可靠性與性能邊界
引言:車規級模塊為何成為智能汽車的核心基石? 隨著智能座艙、自動駕駛等技術的快速發展,車載通信模塊已從單一的“連接工具”演變為支撐整車
車規級單通道低邊驅動器SiLM27531M,助力GaN/SiC功率系統高效運行
,SiLM27531M車規級低邊單通道門極驅動器。該產品支持30V供電,提供5A強驅動電流與納秒級傳輸延遲,具備優異的抗噪特性與負壓耐受能力,可高效、可靠地驅動MOSFET、SiC及G
發表于 01-07 08:07
CW32A系列(車規級 MCU)介紹
定位:汽車電子應用,通過 AEC-Q100 認證,滿足車規級可靠性要求。
核心特性:
內核:Arm Cortex-M0+/M3/M4,主頻 48MHz~120MHz。
存儲器:Flash 32KB
發表于 11-17 06:30
【CPKCOR-RA8D1】基于CPKCOR-RA8D1的GNSS RTK系統設計
、豐富外設接口及低功耗特性,搭配GNSS模組(如UM982)實現實時動態差分定位。
一、系統設計目標
支持RTK差分定位(固定解精度達厘米級)。實現基站與流動站數據交互(如RTCM
發表于 11-09 19:55
從軌尖到云端:云翎智能rtk高精度定位工作記錄儀構建鐵路巡檢數字孿生
云翎智能RTK高精度定位工作記錄儀通過厘米級定位、多源數據融合及數字孿生技術,構建了鐵路巡檢的虛實映射體系,實現了從軌尖物理世界到云端數字世界的全流程智能化管理,具體體現在以下核心層面:云翎智能
InterGEO2025 | 和芯星通發布UM98XC系列 全系統多頻高精度RTK星基定位模塊
近日,在德國法蘭克福舉辦的InterGEO2025展會期間,和芯星通首次展出面向精準農業、無人機、測量測繪等領域的Allinone產品—UM98XC系列全系統多頻高精度RTK星基定位


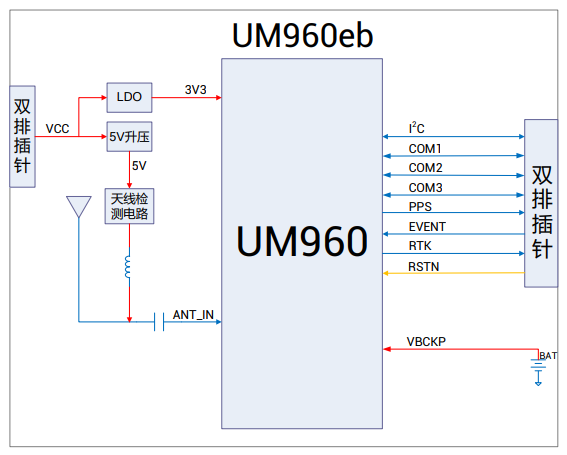
和芯星通高精度RTK模塊UM960評估板的概述和接口說明
UM960 是和芯星通自主研發的新一代 BDS/GPS/GLONASS/Galileo/QZSS 全系統多頻高精度 RTK 定位模塊, 面向
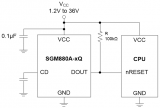
圣邦微電子推出36V車規級電源電壓監測芯片SGM880xQ
圣邦微電子推出 36V 車規級電源電壓監測芯片 SGM880xQ,憑借其高精度、低功耗及車規
動態差分技術突破:頂堅RTK高精度執法儀實現鐵路隱患排查精準防控
動態差分技術(RTK)的突破,使RTK執法記錄儀在鐵路隱患排查中實現了“毫米級”精準防控,為鐵路安全提供了革命性的技術保障。頂堅RTK高精度

云翎智能單北斗可定制RTK高精度記錄儀如何賦能鐵路巡檢安全
執法記錄儀技術革新:破解復雜環境定位難題厘米級高精度定位:依托北斗三號全球衛星導航系統,結合RTK技術,實現水平定位精度±1cm,高程精度±




 工商網監
工商網監
評論