 特斯拉車首次自己交付自己,是由哪些技術支撐的?
特斯拉車首次自己交付自己,是由哪些技術支撐的?

[首發于智駕最前沿微信公眾號]2025年6月28日,第一輛完全自動駕駛的特斯拉Model Y自己從工廠開到客戶家完成交付,比原計劃提前了一天!整個過程包括高速公路行駛在內的跨城鎮運輸,全程實現無人駕駛(沒有遠程安全員)!
“車內完全沒有人,且在任何時候都沒有遠程操作員進行控制。”從某種意義上說,特斯拉的完全自動駕駛(FSD)和機器人出租車項目也能夠做到這一點,只是特斯拉沒有信心它們能夠長時間足夠可靠地運行,從而無需人工監管。 而這一次model Y的自主交付,穿越整個城市,最高時速達到116 km/h,總路程約 24 公里(30 minutes,可見全程還是低速為主),成功抵達車主家中,整個過程無需任何人類干預。這一事件標志著自動駕駛技術的重大突破。

HW5.0硬件平臺:構建自動駕駛的感知與運算基石
特斯拉此次無人駕駛交付的成功,離不開其最新的HW5.0 硬件平臺的強力支撐。該平臺在傳感器配置和計算能力上都實現了跨越式升級。
在傳感器方面,特斯拉構建了一套精密且全面的感知系統。12顆高清攝像頭覆蓋車輛 360 度視角,探測距離可達 250 米,能夠精準捕捉道路上的各種細節,包括遠處的交通標志、周圍車輛的行駛狀態以及行人的動作。為應對復雜天氣狀況,這些攝像頭采用了三星定制的 “耐候鏡頭”,內置加熱元件可以在一分鐘內快速融化冰雪,疏水涂層則能有效提升在雨天或霧天的透光率,確保攝像頭始終保持清晰的視野。此外,4 顆 4D 毫米波雷達和超聲波傳感器與攝像頭相互配合,形成了多傳感器融合的感知矩陣。毫米波雷達不受光線和天氣影響,能夠實時探測車輛周圍物體的距離、速度和角度,超聲波傳感器則在近距離感知和泊車場景中發揮重要作用。
計算能力上,HW5.0平臺配備了 Dojo 超級計算機,其算力達到了1.1 EFLOPS,是前代產品的 5 倍之多。如此強大的算力,使得系統能夠每秒處理 250 億像素的數據,為復雜的神經網絡運算提供了堅實保障。無論是 4D 環境建模,還是實時路徑規劃,都能快速且準確地完成,確保車輛在行駛過程中做出及時、合理的決策。同時,平臺采用的冗余設計也極大提升了系統的可靠性,雙獨立計算單元具備 0.3 毫秒自動切換能力,即使其中一個單元出現故障,另一個單元也能迅速接管,保證車輛行駛的安全性和穩定性。
EFLOPS是浮點算力單位,適用于需要高精度計算的場景(如科學模擬、AI訓練)。
TOPS是操作次數單位,側重低精度整數運算,常見于邊緣設備(如自動駕駛芯片、手機NPU)。
如果硬要換算一下,1 EFLOPS = 10^6 TOPS,但實際轉換需考慮精度差異:若硬件支持混合精度(如FP16+INT8),這個換算僅是理論峰值,而且實際效率還受內存帶寬限制。
| 場景 | 典型硬件 | 適用單位 | 原因 |
| 超級計算機 | 特斯拉Dojo、Frontier | EFLOPS | 需要雙精度(FP64)浮點運算進行復雜科學計算或大規模AI訓練 |
| AI推理芯片 | 英偉達Orin、華為昇騰 | TOPS | 推理任務通常使用INT8/INT4量化模型,TOPS更能反映實際吞吐量 |
還需要說明的是Dojo是一個計算系統架構,也被稱為超級計算機架構,可以組合擴展的(所謂scalable),它的核心芯片是D1。在特斯拉引領的自動駕駛技術變革浪潮中,Dojo 扮演著舉足輕重的角色,它不僅是特斯拉 AI 戰略的核心驅動力,更是其在硬件層面實現突破的關鍵標志。但嚴格來說,Dojo 一個集計算、網絡、輸入 / 輸出(I/O)芯片,指令集架構(ISA)、電源傳輸、封裝和冷卻于一體的超級計算架構。它專為大規模運行定制的機器學習訓練算法而設計,致力于為特斯拉的自動駕駛技術以及其他 AI 應用提供前所未有的強大算力支持 。
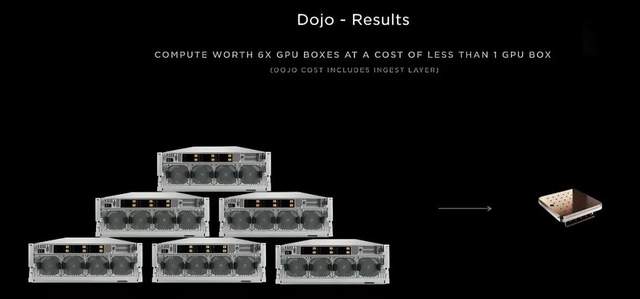
圖 Dojo的堆疊式組合架構,可以組合擴展
Dojo架構的核心組件之一是 D1 芯片。這顆由特斯拉自主研發、基于臺積電 7 納米工藝打造的芯片,集成了多達 500 億個晶體管 。每顆 D1 芯片內包含 354 個定制的 64 位 RISC-V 內核,每個內核配備 1.25MB 的 SRAM,用于存儲數據和指令,這使得 D1 芯片在處理 AI 相關運算時具備高效的數據讀取與存儲能力。從性能參數上看,在 400W 的 TDP(熱設計功耗)下,單個 D1 芯片能夠實現 22.6 TFLOPS 的 FP32(單精度浮點運算)性能 。
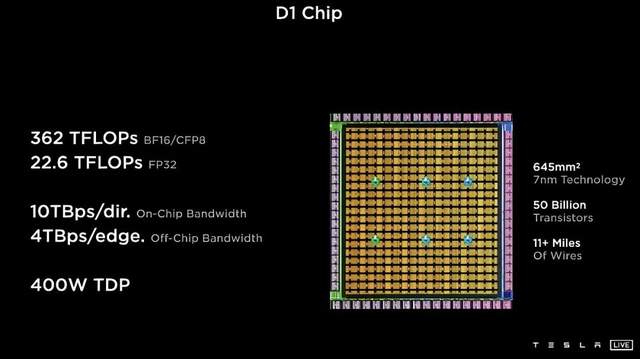
圖 D1芯片,Dojo的基本tile(瓦片)
為了進一步提升算力,特斯拉采用獨特的設計方式,將25 顆 D1 芯片以 5×5 的集群形式進行組織,運用臺積電的晶圓上系統技術(InFO_SoW)進行封裝。這種封裝技術實現了芯片間極低的延遲和極高的帶寬,使得大量的計算得以高效集成。由 25 顆 D1 芯片組成的一個訓練模組,在 15 千瓦的液冷封裝下,能夠達到 556TFLOPS 的 FP32 性能,且每個模組配備 11GB 的 SRAM,并通過 9TB/s 的結構連接 。
Dojo超級計算架構通過將多個這樣的訓練模組進一步組合,構建出更龐大的計算集群。例如,120 個訓練模組組成一組 ExaPOD 計算集群,其中共計包含 3000 顆 D1 芯片,展現出驚人的算力規模。在實際應用中,這種強大的算力讓 Dojo 能夠對海量的視頻數據進行高效處理,如每天處理 23.2 萬幀視頻,助力特斯拉不斷優化神經網絡模型,提升交通燈識別、自動泊車等功能的準確性和穩定性 。
而作為Dojo元件的D1芯片本身也表現不俗。

圖 D1芯片和主流自動駕駛芯片的性能對比,光是功率都達到400w,是Orin的數倍

軟件架構:從代碼(規則)到神經網絡的智能化跨越
特斯拉的FSD V12 軟件架構代表了自動駕駛技術的一次革命性突破。傳統的自動駕駛系統依賴大量的 C++ 代碼來實現各種功能,但 FSD V12 大膽采用了端到端的神經網絡技術,直接將視覺輸入映射為車輛的控制輸出,模擬人類駕駛員的決策過程。
端到端學習模式摒棄了過去繁瑣的代碼邏輯,通過對海量駕駛數據的學習,神經網絡能夠自動識別道路場景中的關鍵信息,并做出相應的駕駛決策。例如,在面對前方100 米處可能出現行人橫穿馬路的情況時,系統能夠根據歷史數據和當前場景特征,預測行人的行動概率,并提前調整車速,以確保行車安全。這種學習方式不僅提高了系統的適應性,還能更好地應對各種復雜的、非標準的道路場景。
HydraNet + Transformer架構是 FSD V12 的另一大核心技術。HydraNet 多任務學習網絡實現了不同任務之間的特征共享,比如在進行物體檢測和車道識別時,能夠避免重復計算,提高運算效率。而 Transformer 的注意力機制則為系統賦予了強大的環境理解能力,它構建的 4D 向量空間(3D 空間 + 時間)可以有效處理遮擋和動態障礙物。當車輛行駛在交通繁忙的路段,面對前方車輛遮擋視線的情況時,系統能夠通過對周圍環境的歷史數據和當前狀態進行分析,預測被遮擋區域可能出現的障礙物,并提前規劃避讓路線。
占用網絡(Occupancy Network)一直用于增強系統對復雜環境的感知能力。該網絡將車輛周圍環境劃分為體素,能夠識別各種不規則障礙物,如側翻的車輛、掉落的貨物等,并預測它們的運動趨勢。這使得特斯拉的自動駕駛系統在面對未標記道路、施工區域等特殊場景時,也能從容應對,大大提升了行駛的安全性和可靠性。
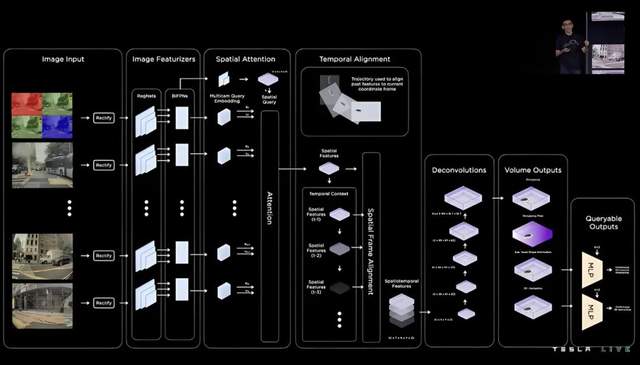
圖 Tesla FSD V12架構圖,“99%都是神經網絡”

數據與訓練:海量數據驅動的智能進化
數據是自動駕駛技術發展的核心驅動力,特斯拉在這方面擁有巨大的優勢。其全球車隊積累了超過120 億英里的真實駕駛數據,這些數據涵蓋了各種道路條件、天氣狀況和駕駛場景,為算法的訓練提供了豐富的素材。同時,特斯拉還通過仿真平臺生成大量的合成數據,模擬現實中難以遇到的極端場景,如突發的自然災害、罕見的交通事故現場等,進一步擴充訓練數據的多樣性,幫助系統更好地應對各種邊緣情況。
Dojo超級計算機在數據處理和模型訓練中發揮著關鍵作用。憑借 88.5 EFLOPS 的總算力(單個Dojo訓練模塊(含3000顆D1芯片)算力為1.1 EFLOPS(每秒1.1×10^18次浮點運算),Dojo超級計算機是多個訓練模塊組成,可以參見
https://www.slashgear.com/1516714/what-to-know-about-tesla-dojo-supercomputer/),Dojo 能夠對海量的視頻數據進行高效處理。例如,它可以每天處理 23.2 萬幀視頻,通過對這些視頻的分析和學習,不斷優化神經網絡模型,提升交通燈識別、自動泊車等功能的準確性和穩定性。
影子模式(Shadow Mode)是特斯拉持續優化自動駕駛系統的重要手段。在實際道路行駛中,該模式會持續對比自動駕駛系統的決策與人類駕駛員的操作,收集兩者之間的差異數據。這些數據被反饋到訓練模型中,用于進一步改進算法,降低系統在實際應用中的干預率。目前,特斯拉的城市道路自動駕駛干預率已降至每千公里1.2 次,這一成績充分體現了數據驅動的優化策略的有效性。

極端環境適應:應對復雜場景的技術底氣
自動駕駛技術在實際應用中面臨著各種復雜的環境挑戰,特斯拉通過硬件和軟件的協同優化,提升了系統在極端環境下的適應能力。
在天氣應對方面,硬件上的耐候設計和軟件算法的優化缺一不可。耐候鏡頭和加熱元件解決了冰雪天氣下攝像頭視野模糊的問題,而HDR 成像和去霧算法則在軟件層面增強了系統在低能見度條件下的感知能力。在暴雨測試中,FSD V12 的避障準確率較前代版本提升了 30%,這得益于算法對雨水干擾的有效過濾和對道路信息的精準提取。
光照條件同樣會影響自動駕駛系統的性能。特斯拉采用的自適應曝光調節和偏振濾鏡技術,能夠有效減少強光眩光的干擾,使交通燈識別準確率提升40%。無論是在陽光強烈的正午,還是在光線昏暗的傍晚,系統都能清晰地識別道路標志和交通信號,確保車輛安全行駛。
對于復雜地形,特斯拉也進行了針對性的算法優化。在舊金山等擁有大量陡坡和急轉彎的城市,FSD V12針對這類特殊地形進行了專門的訓練和參數調整,使其在處理陡坡起步、急轉彎等場景時更加得心應手,急轉彎成功率較 V11 版本提升了 37%。

冗余:保證AI安全的基本技術
安全始終是自動駕駛技術的重心,特斯拉通過多重安全與冗余設計,為無人駕駛交付提供了可靠的保障。
硬件層面,雙計算單元、三冗余傳感器融合以及獨立電源構成了堅固的安全屏障。即使其中一個計算單元出現故障,另一個單元也能無縫接管,確保系統的正常運行;三冗余傳感器融合(攝像頭+ 雷達 + 慣性測量單元)則保證了在某個傳感器失效的情況下,其他傳感器仍能提供準確的環境感知信息。在軟件方面,傳統控制算法與神經網絡相互交叉驗證決策,當神經網絡出現異常時,傳統算法可以及時介入,避免事故發生。在緊急制動場景下,系統能夠實現 0.8g 的減速度,并且避障成功率高達 95%。
此外,特斯拉還建立了實時監控機制,AI系統持續監測傳感器和計算單元的運行狀態,一旦檢測到異常,能夠在 50 微秒內觸發警報或使系統進入安全模式,最大限度地保障車輛和乘客的安全。

總結
當然,這次model Y的自主交付是在美國完成的,在國內表現可能沒這么好,因為國內的訓練數據是禁止流入境外的,特斯拉引以為傲的120億英里的真實駕駛數據,并沒有多少是中國國內的。
比如擬在2026年1月1日生效的最新的國標,《汽車整車信息安全技術要求》GB44495—2024,

圖 GB44495—2024計劃在2026年1月1日生效
就明確有如下測試條目。

圖 防數據出境測試方法
眾所周知,AI的基礎是大數據,AI模型都是大數據喂出來的。所以此次drive itself to owner還只能當做個例來看。何時能夠普及到國內用戶,拭目以待。
審核編輯 黃宇
-
特斯拉
+關注
關注
66文章
6413瀏覽量
131353 -
AI
+關注
關注
91文章
39755瀏覽量
301360 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179788
發布評論請先 登錄
當谷歌自己發電,AI 系統會回到基礎工程嗎?

比亞迪首次超越特斯拉,全球純電銷量第一!
【社區之星】向愨——通過文檔來梳理自己的思路,讓自己思維更細致,更規范
自動駕駛汽車如何確定自己的位置和所在車道?

【人臉+手勢AI識別模組】100元自己做一個數碼相機

睿海光電以高效交付與廣泛兼容助力AI數據中心800G光模塊升級
“香山”實現業界首個開源芯片的產品級交付與首次規模化應用

如何打造一個屬于自己的手勢識別應用

用 VSCode 編寫自己的 KiCad 插件(下)

用VSCode編寫自己的KiCad插件(上)詳細步驟教程

今日看點丨特斯拉首輛全自動駕駛汽車將交付!;蘋果首次承認Siri架構落后,新版本推遲至2026年
佛瑞亞海拉車燈與VinFast汽車深化戰略合作
如何用FastMCP快速開發自己的MCP Server?

光伏智慧運維系統讓電站自己說話和思考



 工商網監
工商網監
評論